深海水下作业金属切割机器人的制作方法
本发明属于水下金属切割领域,具体是深海水下作业金属切割机器人。
背景技术:
1、无人遥控潜水器,是用于水下观察、检查和施工的水下机器人。海洋中蕴藏着丰富的额生物资源、矿产资源和海洋资源,到目前为止,已开发的海洋资源只占总量很小的一部分。各国加大了海洋石油的钻井开采,海底管道的铺设长度也随之增加。为保证水下油气生产的正常进行,对于管线破损情况严重的管道,需要进行切割与替换操作。现有的完成水下管道切割和替换作业都是通过人工利用机械工作进行手工操作,这样不仅需要花费大量时间,而且劳动强度大,安全风险高。随着水深的增加,人工潜水很难到达作业区域,直接影响破损管线不能得到及时的切割和替换处理。
2、为了解决上述问题,专利公开号cn106270802a公开了一种海底管道切割用水下机器人,由作业rov本体、切割机构、支撑腿和一个小型辅助机械手构成;rov本体包括框架、浮力块、推进器和七自由度机械手和五自由度机械手、水下照明装置,摄像装置以及液压电控装置;支撑腿均匀分布在海底管道切割机器人的两侧,其中心线与两套切割机构中心线重合,对作业rov起到支撑作用;小型辅助机械手通过螺栓连接在海底管道切割机器人下方,位于两套切割机构中间;两套切割机构通过螺栓固定在海底管道切割机器人底部前后方,定位液压缸将切割机构与管道定位,通过控制水刀机构的旋转完成破损管道的切割。
3、上述一种海底管道切割用水下机器人,通过机械手控制进行切割,但海底的金属件外表往往覆盖有沉降物,沉降物会影响对金属件的观察;水下环境伴随着水体流动,会对机械手产生干扰,使切割位置发生偏离;切割时会产生污染物,污染物会对周边生态产生影响。
技术实现思路
1、为了解决现有技术中水下环境伴随着水体流动,会对机械手产生干扰,使切割位置发生偏离的问题,本发明的目的是提供深海水下作业金属切割机器人,能够通过高压水枪喷射水流以平衡水体流动带来的干扰。
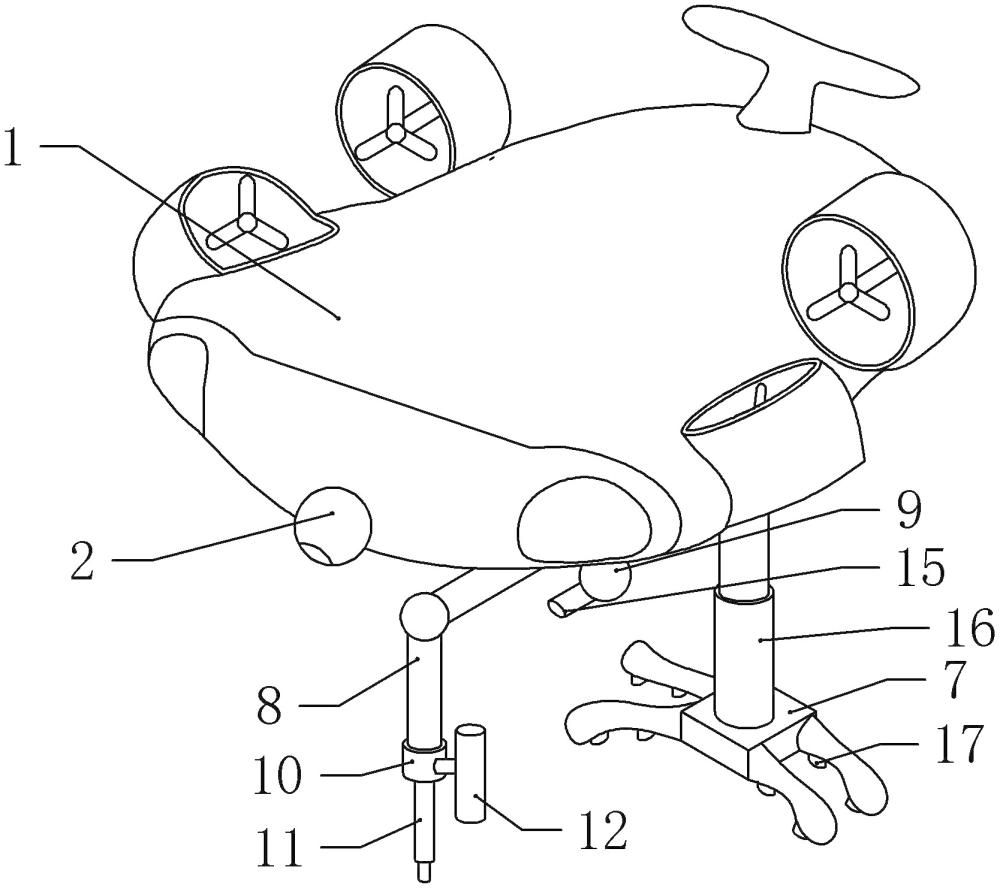
2、为了实现上述目的,本发明的技术方案如下:深海水下作业金属切割机器人,包括水下无人机,水下无人机设有球形摄像头;水下无人机底部固定连接有扩展箱,扩展箱内设有控制器、陀螺仪和惯性传感器,扩展箱外侧底部固定连接有机械爪、机械臂和万向关节;
3、机械臂末端固定连接有切割组件,切割组件包括机壳,机壳的一端固定连接有水下切割枪,机壳上设有两侧开口的净化筒,净化筒靠近水下切割枪的一端设有吸附滤棉,净化筒远离水下切割枪的一侧设有水泵;
4、万向关节上固定连接有高压水枪;
5、控制器用于获取陀螺仪和惯性传感器检测的加速度大小和加速度方向,根据加速度大小和加速度方向控制万向关节朝向加速度方向反方向,启动高压水枪,高压水枪的运行功率根据加速度大小进行动态调节。
6、采用上述方案后实现了以下有益效果:水下无人机能够在水下行驶,前往作业区域。球形摄像头用于增加观察范围,由于机械臂和机械爪均在水下无人机底部,常规的水下无人机视野难以观察到底部,因此采用球形摄像头,方便作业时进行观察。机械爪能够夹持物体,能够通过抓取金属件的一部分或其他固定目标,使水下无人机在作业位置固定;机械爪也能够抓取切割后的碎片,将碎片转移或携带至水面回收。
7、当水下无人机固定在作业位置后,通过机械臂移动切割组件,使切割组件对金属件进行切割。当金属件上覆盖有沉降物时,能够通过操作万向关节,使高压水枪对准沉降物,利用高压水流进行冲刷,以减少沉降物对视线或焊接的干扰。切割组件上设有水下切割枪,能够且不限于对管道和金属片等金属件进行切割。切割组件上设有净化筒,当进行金属切割时不可避免的产生碎屑或带化学污染性的颗粒,净化筒内设有水泵,能够对切割部的水体进行吸取,使水体穿过吸附滤棉,将大部分有害物质进行吸附或滤除,以减少金属切割过程对海洋环境的污染。
8、在水体中作业,会受到水流的影响,进而产生晃动,影响水下切割枪的对准,进而使切割产生偏离或切割线不完整。陀螺仪和惯性传感器能够检测水流对水下无人机产生的偏移加速度大小和加速度方向,根据加速度大小和加速度方向,控制高压水枪进行反方向喷射,高压水枪产生的推力能够与水流作用相抵,进而使装置更稳定。由于机械爪能够通过抓紧产生的摩擦力抵抗移动,因此高压水枪的喷射力仅需在水流推力减摩擦力和水流推力加摩擦力之间便能够达到较好的稳定效果。
9、与现有技术相比,机械爪能够在固定在作业区域,稳定水下无人机,同时能够夹持携带物件,方便对切割下的零件进行回收或转移;高压水枪能够对金属件上的沉降物进行冲刷,减少沉降物对视野和切割的干扰,同时结合陀螺仪和惯性传感器的反馈,高压水枪能够产生用于抵抗水流作用的推力,稳定切割过程;净化筒能够对切割产生的污染物进行吸附过滤,减少切割过程产生的污染物对海洋生态带来的危害。
10、进一步,机械爪通过伸缩杆与扩展箱连接。
11、有益效果:伸缩杆能够收缩,减少占用空间,使水下无人机能够通过更小的缝隙,方便进入礁石缝隙或沉船内。同时在抓取固定后,能够通过伸缩杆调整无人机位置,方便切割操作进行。
12、进一步,机械爪的爪面上设有若干吸盘。
13、有益效果:吸盘能够进行吸取固定,加强机械爪的固定效果。当抓取的固定物表面不规则时,吸盘能够显著的增强固定效果。
14、进一步,扩展箱上固定连接有照明灯,照明灯设有万向灯座;
15、控制器根据球形摄像头聚焦位置,调节万向灯座旋转角度。
16、有益效果:水下无人机带有光源,但光源亮度低且不能转动,难以对作业区起到良好的照明效果。万向灯座能够使照明灯跟随球形摄像头聚焦位置进行照明,方便水下无人机驾驶和切割作业。
17、进一步,扩展箱上固定连接有声波发射器。
18、有益效果:水下环境作业还会受到生物干扰,同时也可能对生物产生损伤。声波发射器能够发射特定声波,对鱼类或其他生物进行驱赶,减少其靠近作业区的概率,减少生物干扰的同时,对生物进行保护。
19、进一步,净化筒靠近水下切割枪的一端设有单向瓣膜。
20、有益效果:单向瓣膜能够对反向通过单向瓣膜的杂质或水流进行阻碍,阻止杂质从净化筒内逃出的概率。
21、进一步,水下无人机设有连接线,连接线用于信号控制和供电。
22、有益效果:连接线能够提供稳定的通讯和供电,能够基于连接线长度,保障在水下一定深度能够接收到稳定信号控制,同时减少供电焦虑。
23、进一步,扩展箱上设有压力传感器。
24、有益效果:受物理材料影响,在水压过大时,会对各组件产生破坏。压力传感器用于检测水压强度,以减少进入高水压区而产生的机体损坏。
技术特征:
1.深海水下作业金属切割机器人,其特征在于:包括水下无人机,水下无人机设有球形摄像头;水下无人机底部固定连接有扩展箱,扩展箱内设有控制器、陀螺仪和惯性传感器,扩展箱外侧底部固定连接有机械爪、机械臂和万向关节;
2.根据权利要求1所述的深海水下作业金属切割机器人,其特征在于:机械爪通过伸缩杆与扩展箱连接。
3.根据权利要求2所述的深海水下作业金属切割机器人,其特征在于:机械爪的爪面上设有若干吸盘。
4.根据权利要求3所述的深海水下作业金属切割机器人,其特征在于:扩展箱上固定连接有照明灯,照明灯设有万向灯座;
5.根据权利要求4所述的深海水下作业金属切割机器人,其特征在于:扩展箱上固定连接有声波发射器。
6.根据权利要求5所述的深海水下作业金属切割机器人,其特征在于:净化筒靠近水下切割枪的一端设有单向瓣膜。
7.根据权利要求6所述的深海水下作业金属切割机器人,其特征在于:水下无人机设有连接线,连接线用于信号控制和供电。
8.根据权利要求7所述的深海水下作业金属切割机器人,其特征在于:扩展箱上设有压力传感器。
技术总结
本发明公开了水下金属切割领域的深海水下作业金属切割机器人,包括水下无人机,水下无人机设有球形摄像头;水下无人机底部固定连接有扩展箱,扩展箱内设有控制器、陀螺仪和惯性传感器,扩展箱外侧底部固定连接有机械爪、机械臂和万向关节;机械臂末端固定连接有切割组件,切割组件包括机壳,机壳的一端固定连接有水下切割枪,机壳上设有两侧开口的净化筒,净化筒靠近水下切割枪的一端设有吸附滤棉,净化筒远离水下切割枪的一侧设有水泵;万向关节上固定连接有高压水枪;控制器根据检测的加速度大小和加速度方向控制万向关节朝向加速度方向的反方向转动,通过高压水枪喷射水流以平衡水体流动带来的干扰。
技术研发人员:周霞,李国旭,轩可轩
受保护的技术使用者:海南中南标质量科学研究院有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!