罩和机械手的制作方法
本发明涉及罩和机械手。
背景技术:
1、机械手被利用于物品的制造以及输送等各种领域。在这样的领域中,在机械手的把持部(例如爪部)安装例如电容式或者压敏式的接触传感器。并且,进行利用传感器检测自物品(也称为“把持物”)作用于把持部的力、即自把持部作用于物品的力的操作。例如,参照传感器的检测值以反馈控制把持力。因此,在利用把持部把持较脆弱的把持物的情况下,要求该传感器的精度足够高。在提高安装于机械手的传感器的精度的技术中,已知有通过改变来自传感器的布线或电路从而提高该传感器的精度的技术(例如参照专利文献1和专利文献2)。
2、现有技术文献
3、专利文献
4、专利文献1:日本国特开2021-167747号公报
5、专利文献2:日本国特开2021-166149号公报
技术实现思路
1、发明要解决的问题
2、然而,电容式或者压敏式的传感器通常容易受到噪声的影响。因此,在上述那样的现有技术中,存在如下情况:传感器的布线或电路所无法完全吸收的噪声对传感器的检测值造成影响。另外,存在如下情况:在机械手把持的把持物容易带电的情况下,设于机械手的把持部的传感器受到由带电的把持物的电场产生的噪声的影响。另外,在配置机器人的自动化的生产车间产生各种噪声。因此,设于机械手的把持部的传感器在生产车间受到各种噪声的影响。
3、其结果是,存在如下情况:无法准确地检测自把持部作用于把持物的力,机械手会损伤把持物。特别是,检测施加于把持部的载荷的压敏式传感器具有薄型且结构简单这样的的优点。而另一方面,压敏式传感器容易发觉噪声,至今无法搭载于机械手。
4、本发明的一方案以实现抑制机械手的把持部所利用的传感器的因噪声而导致的精度的降低的技术为目的。
5、用于解决问题的方案
6、为了解决上述的课题,本发明的一方案的罩是安装于机械手的把持部的罩,其中,该罩具备:覆盖部,其由绝缘体构成,覆盖机械手的把持部;以及屏蔽层,其由导体构成,设于所述覆盖部的内部或表面,(1)在所述把持部设有传感器,所述屏蔽层被设为覆盖该传感器,或者,(2)在所述覆盖部设有传感器,该传感器被所述屏蔽层覆盖。
7、另外,为了解决上述的课题,本发明的一方案的机械手具备上述的罩。
8、发明的效果
9、根据本发明的一方案,能够抑制机械手的把持部所利用的传感器的因噪声而导致的精度的降低。
技术特征:
1.一种罩,其安装于机械手的把持部,其中,
2.根据权利要求1所述的罩,其中,
3.根据权利要求1所述的罩,其中,
4.根据权利要求1所述的罩,其中,
5.一种机械手,其中,
技术总结
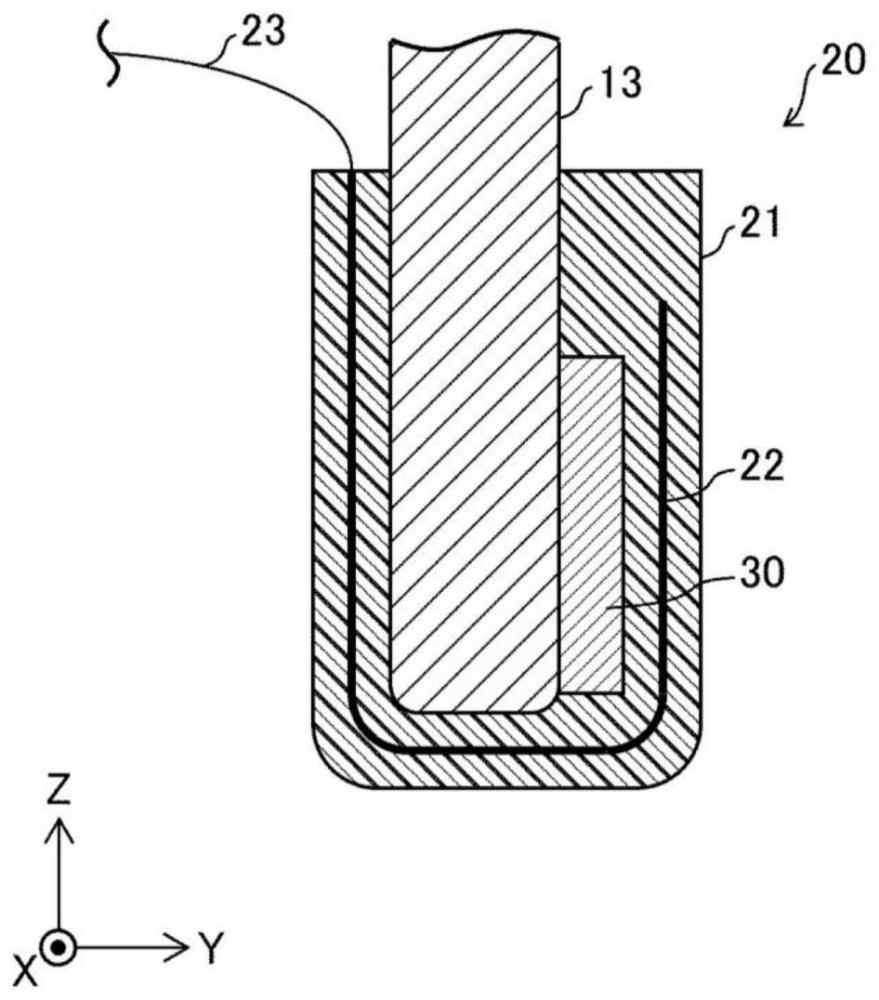
本发明提供罩和机械手。罩(20)具备覆盖机械手(12)的把持部(13)的绝缘体制的覆盖部(21)和设于覆盖部(21)的内部的导体制的屏蔽层(22)。把持部(13)所具备的传感器(30)或者设于覆盖部(21)的传感器(30)被屏蔽层(22)覆盖。
技术研发人员:田名网克周,林美由希
受保护的技术使用者:新东工业株式会社
技术研发日:
技术公布日:2024/6/30
- 还没有人留言评论。精彩留言会获得点赞!