一种用于机器视觉的共享单车分拣运输车
本发明涉及运输车,尤其涉及一种用于机器视觉的共享单车分拣运输车。
背景技术:
1、在现代城市中,共享单车行业迅猛发展,但同时也引发了一系列问题,其中最主要的问题之一是单车的管理和维护。在许多城市,不同共享单车公司的车辆被随意停放在街道上,导致街道杂乱无章,同时这些公司需要耗费大量人力成本来辨认、回收和维护这些共享单车。
2、用于机器视觉的共享单车分拣与运输装置应运而生,它利用机械臂夹持和搬运共享单车,摄像头模块收集单车坐标信息,计算机运用人工智能技术进行图像识别和实时机器学习,以识别和分类不同公司的共享单车,并将共享单车坐标信息传递给机械臂控制系统,从而实现精准抓取共享单车。
3、这种方法具有高精度的视觉识别、高效的分拣速度以及便捷的操作,能够显著提升城市共享单车的智能管理水平,同时减少管理成本和人员风险。
4、因此,利用机器视觉的共享单车分拣与运输装置被认为是解决现代城市中共享单车管理和维护难题的极具潜力的技术。
技术实现思路
1、本发明提供一种用于机器视觉的共享单车分拣运输车。目的是对现有共享单车分拣运输车的机械臂进行改进,以提高作业效率。
2、本发明通过下述技术方案实现:
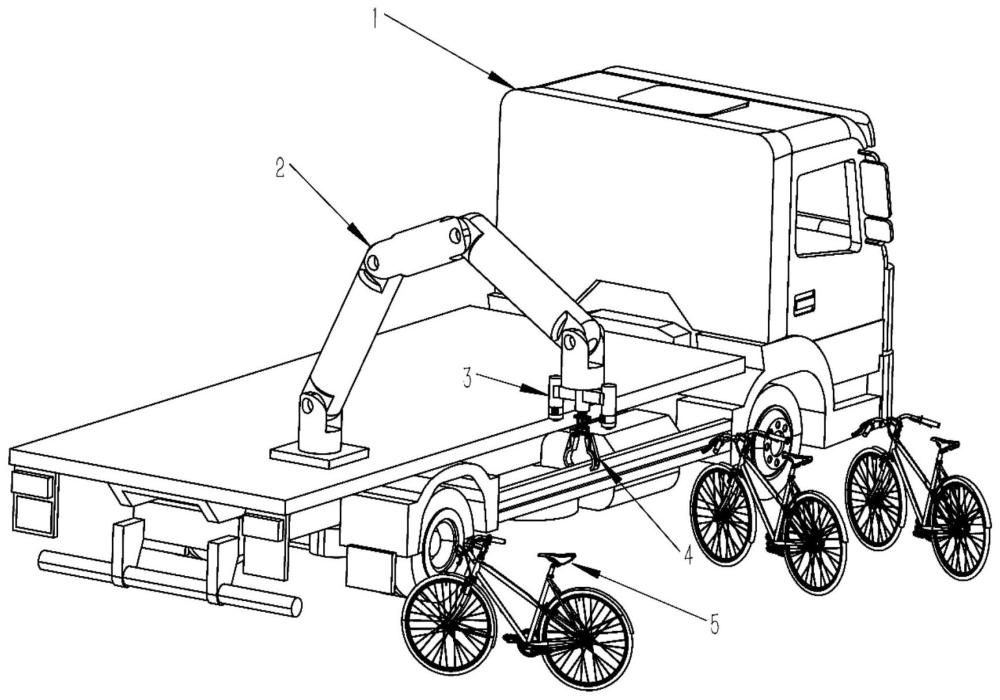
3、一种用于机器视觉的共享单车分拣运输车,包括车体1,位于车体1上的机械臂2,以及安装在机械臂2上摄像头安装机构3和夹持机构4,所述机械臂2、摄像头安装机构3和夹持机构4依次连接;所述机械臂2、摄像头安装机构3和夹持机构4连接车内控制系统;
4、所述夹持机构4包括丝杆电机4-1、第一支撑板4-2、直线光轴4-3、丝杆4-5、第二支撑板4-7、连杆4-10、夹爪4-14、丝杆螺母4-9和第三支撑板4-13;
5、所述丝杆电机4-1固定在第一支撑板4-2上;
6、所述直线光轴4-3为两根,这两个直线光轴4-3分别连接在第一支撑板4-2与第三支撑板4-13之间,并分布在第一支撑板4-2和第三支撑板4-13的两端;
7、所述第二支撑板4-7的两端分别套设在两根直线光轴4-3上,并能在直线光轴4-3上移动;
8、所述丝杆4-5的一端通过联轴器4-4连接丝杆电机4-1,另一端穿过第二支撑板4-7连接在第三支撑板4-13的轴承4-12上;
9、所述丝杆螺母4-9为两个,并安装在丝杆4-5上;这两个丝杆螺母4-9其中一个设置在第二支撑板4-7上方,另一个设置在第二支撑板4-7下方;丝杆4-5转动时,实现第二支撑板4-7沿着两个直线光轴4-3的轴线上下移动;
10、所述夹爪4-14为两个、且结构对称;这两个夹爪4-14的内侧连接点,分别通过活动铰链连接在第三支撑板4-13的两端;夹爪4-14的外侧连接点,分别通过两根连杆4-10与第二支撑板4-7的两端活动铰接。
11、所述摄像头安装机构3包括三个并排设置的圆柱件3-1,这三个圆柱件3-1的径向方向通过横梁3-2连接(焊接方式)。
12、在位于两侧的圆柱件3-1的下端顶部,安装有向下视角摄像头3-3;
13、在位于两侧的圆柱件3-1的下端侧部,安装有径向视角摄像头3-4。
14、位于中间的圆柱件3-1的上端与机械臂2连接。
15、位于中间的圆柱件3-1的下端与夹持机构4连接。
16、所述径向视角摄像头3-43-3能绕圆柱件3-1的轴线转动。
17、所述夹爪4-14的内侧轮廓与共享单车5的车架横截面相适应。
18、所述夹爪4-14的内侧表面设置有防滑层。
19、本发明相对于现有技术,具有如下的优点及效果:
20、本发明用于机器视觉的共享单车分拣运输车,提升共享单车管理效率,传统的共享单车管理方式耗费大量人力和时间成本,而本发明采用机器视觉,配合智能控制,以迅速且精确地辨识和夹取共享单车,极大提高了共享单车管理的效率。
21、本发明夹持机构采用了丝杆机构控制夹爪的夹持动作,结构简单,具有动作响应速度快,力矩大等特点。
22、本发明利用机器视觉并与当前智能控制技术有机结合,可降低人工成本和减轻安全风险。与传统人工操作相比,采用本发明可减少人员受伤的风险,提升工作效率,减少人工成本和安全风险:
23、本发明技术手段简便易行,通过机械臂增加机器视觉功能,为智能控制技术能够自动完成识别、夹取等操作,无需人工干预,大大提高了工作效率。
技术特征:
1.一种用于机器视觉的共享单车分拣运输车,包括车体(1),位于车体(1)上的机械臂(2),以及安装在机械臂(2)上摄像头安装机构(3)和夹持机构(4),所述机械臂(2)、摄像头安装机构(3)和夹持机构(4)依次连接;所述机械臂(2)、摄像头安装机构(3)和夹持机构(4)连接车内控制系统;其特征在于:
2.根据权利要求1所述用于机器视觉的共享单车分拣运输车,其特征在于:所述摄像头安装机构(3)包括三个并排设置的圆柱件(3-1),这三个圆柱件(3-1)的径向方向通过横梁(3-2)连接;
3.根据权利要求1所述用于机器视觉的共享单车分拣运输车,其特征在于:位于中间的圆柱件(3-1)的上端与机械臂(2)连接。
4.根据权利要求3所述用于机器视觉的共享单车分拣运输车,其特征在于:位于中间的圆柱件(3-1)的下端与夹持机构(4)连接。
5.根据权利要求3所述用于机器视觉的共享单车分拣运输车,其特征在于:所述径向视角摄像头(3-4)3-3能绕圆柱件(3-1)的轴线转动。
6.根据权利要求1所述用于机器视觉的共享单车分拣运输车,其特征在于:所述夹爪(4-14)的内侧轮廓与共享单车(5)的车架横截面相适应。
7.根据权利要求3所述用于机器视觉的共享单车分拣运输车,其特征在于:所述夹爪(4-14)的内侧表面设置有防滑层。
8.根据权利要求2所述用于机器视觉的共享单车分拣运输车,其特征在于:三个并排设置的圆柱件(3-1)与横梁(3-2)之间采用焊接方式连接。
技术总结
本发明公开了一种用于机器视觉的共享单车分拣运输车,包括车体,位于车体上的机械臂,以及安装在机械臂上摄像头安装机构和夹持机构,所述机械臂、摄像头安装机构和夹持机构依次连接;机械臂、摄像头安装机构和夹持机构连接车内控制系统;夹持机构包括丝杆电机、第一支撑板、直线光轴、丝杆、第二支撑板、连杆、夹爪、丝杆螺母和第三支撑板;直线光轴为两根,这两个直线光轴分别连接在第一支撑板与第三支撑板之间,并分布在第一支撑板和第三支撑板的两端;第二支撑板的两端分别套设在两根直线光轴上,并能在直线光轴上移动。本发明分拣效率高、操作方便等优点,能够提高城市共享单车的智能化管理程度。
技术研发人员:康浩岚,王伟健,张东,周宇鹏,张希羽
受保护的技术使用者:华南理工大学
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!