本申请涉及机器人,尤其涉及一种机器人评价方法、装置、电子设备和存储介质。
背景技术:
1、随着自动化技术的不断发展以及智能制造相关产业的产业升级,越来越多的厂商着手提高自身生产力水平,以应对日渐提高的生产需求。其中,机器人技术作为能够有效降低工作成本、提高工作效率的技术,被越来越多的用户所青睐。尤其是具备多自由度的机器人,它们能够有效的提高生产力水平。但是,多自由度意味着结构更加复杂,那么就有必要对这些机器人进行评估,以确保机器人的生产安全。
2、当前,对于机器人的安全评估方面,相关技术人员检测机器人在工作中的温度值、震动信号和压力值等对机器人的工作状态进行评估。但是,这种方式忽略了机器人在工作前的安全检查,一旦工作中出现严重故障,将会为用户造成损失,也无法保证机器人直接作业的安全性。
技术实现思路
1、本申请提供了一种机器人评价方法、装置、机器人和存储介质,以提高机器人的安全性。
2、根据本申请的一方面,提供了一种机器人评价方法,包括:
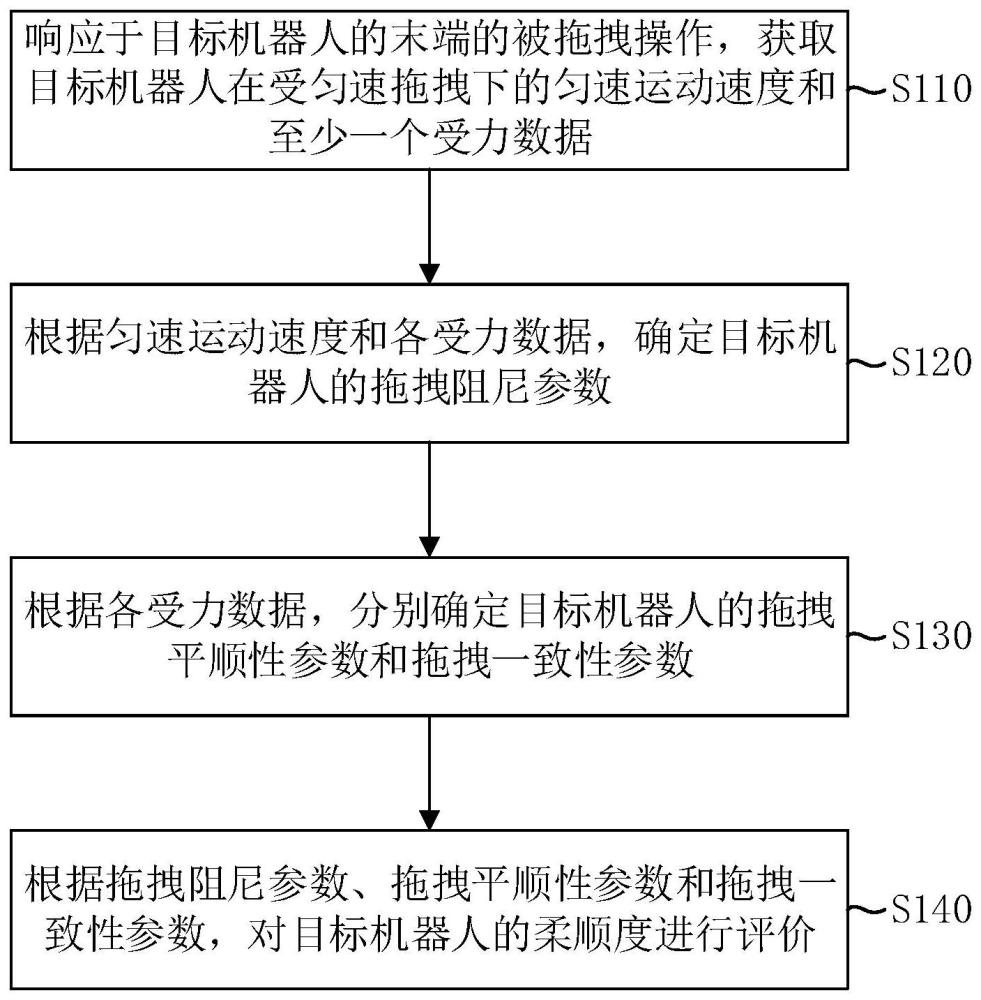
3、响应于目标机器人的末端的被拖拽操作,获取目标机器人在受匀速拖拽下的匀速运动速度和至少一个受力数据;
4、根据匀速运动速度和各受力数据,确定目标机器人的拖拽阻尼参数;
5、根据各受力数据,分别确定目标机器人的拖拽平顺性参数和拖拽一致性参数;
6、根据拖拽阻尼参数、拖拽平顺性参数和拖拽一致性参数,对目标机器人的柔顺度进行评价。
7、根据本申请的另一方面,提供了一种机器人评价装置,包括:
8、受力数据获取模块,用于响应于目标机器人的末端的被拖拽操作,获取目标机器人在受匀速拖拽下的匀速运动速度和至少一个受力数据;
9、拖拽阻尼确定模块,用于根据匀速运动速度和各受力数据,确定目标机器人的拖拽阻尼参数;
10、拖拽参数确定模块,用于根据各受力数据,分别确定目标机器人的拖拽平顺性参数和拖拽一致性参数;
11、机器柔顺评价模块,用于根据拖拽阻尼参数、拖拽平顺性参数和拖拽一致性参数,对目标机器人的柔顺度进行评价。
12、根据本申请的另一方面,提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本申请任一实施例所述的机器人评价方法。
16、根据本申请的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本申请任一实施例所述的机器人评价方法。
17、本申请实施例的技术方案,通过获取目标机器人末端被拖拽过程中的受力数据和匀速运动速度,进而计算目标机器人的多种不同的用于评价柔顺度的指标参数,从而对柔顺度进行评价。通过确定目标机器人的拖拽阻尼参数、拖拽平顺性参数和拖拽一致性参数,较为客观、综合且准确的对目标机器人受到拖拽时机器人整体的柔顺性做出评价,提出了一种切实可行的验证评估方法,保证在使用机器人前对其操作柔顺程度进行检验,从而保证机器人的稳定工作,以提高机器人的安全性。
18、应当理解,本部分所描述的内容并非旨在标识本申请的实施例的关键或重要特征,也不用于限制本申请的范围。本申请的其它特征将通过以下的说明书而变得容易理解。
技术特征:1.一种机器人评价方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述被拖拽操作包括至少一次正向拖拽操作和至少一次反向拖拽操作,所述根据匀速运动速度和各所述受力数据,确定所述目标机器人的拖拽阻尼参数,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据各所述受力数据,确定所述目标机器人的拖拽平顺性参数,包括:
4.根据权利要求2所述的方法,其特征在于,所述根据各所述受力数据,确定所述目标机器人的拖拽一致性参数,包括:
5.根据权利要求1-4任一项所述的方法,其特征在于,所述根据所述拖拽阻尼参数、所述拖拽平顺性参数和所述拖拽一致性参数,对所述目标机器人的柔顺度进行评价,包括:
6.根据权利要求1-4任一项所述的方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述拖拽力矩和所述拖拽阻尼参数,对所述目标机器人进行优化,包括:
8.一种机器人评价装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的机器人评价方法。
技术总结本申请公开了一种机器人评价方法、装置、电子设备和存储介质。响应于目标机器人的末端的被拖拽操作,获取目标机器人在受匀速拖拽下的匀速运动速度和至少一个受力数据;根据匀速运动速度和各受力数据,确定目标机器人的拖拽阻尼参数;根据各受力数据,分别确定目标机器人的拖拽平顺性参数和拖拽一致性参数;根据拖拽阻尼参数、拖拽平顺性参数和拖拽一致性参数,对目标机器人的柔顺度进行评价。较为客观、综合且准确的对目标机器人受到拖拽时机器人整体的柔顺性做出评价,提出了一种切实可行的验证评估方法,保证在使用机器人前对其操作柔顺程度进行检验,从而保证机器人的稳定工作,以提高机器人的安全性。
技术研发人员:戚祯祥,杨帆,许雄
受保护的技术使用者:节卡机器人股份有限公司
技术研发日:技术公布日:2024/2/29