本发明涉及简单的互换机构,该互换机构用于更换机器人主臂的远端端部处的端部执行器或操纵器,以使得能够实现快速且可靠的转换,这种转换是灵活且可扩展的。该互换机构还包括用于基于要执行的任务向主机器人发送指令和接收来自主机器人的指令的计算机接口。该机构消除了在装载过程或卸载过程期间寻找端部执行器和主臂的闩锁位置时对复杂的对准过程的需要,从而实现了与端部执行器的尺寸和重量无关的稳健且稳定的机构。
背景技术:
1、现代制造业通常是完全自动化的并且涉及诸如对尺寸较小且具有复杂的结构和尺寸的工业产品进行组装和加工的工作。诸如半导体组件、汽车零件组件、接触透镜的制造、光学透镜和微型机械零件的产品是在进行包装以用于最终运送给客户之前通常会进行组装和质量检查的示例中的一些示例。这种部件在许多情况下是小尺寸的精密部件并且具有各种各样的形状,并且需要主要使用单个主机器人设备以高速连续地制造。因此,在制造现场,需要根据工件和相关过程改变包括机器人设备的端部执行器和工具的互换在内的设置。出于这个原因,对其中通过对机器人设备进行编程来执行配置改变的自动设置改变的需求越来越大。
2、在制造现场,根据要组装或要制造的部件的类型,以根据工件类型以及工艺流程的变化对机器人设备的端部执行器、臂或工具进行更换的形式执行配置设置。工人需要大量的手动耗力和工作时间来手动地改变常规的机器人设备的配置,并且需要所谓的自动配置改变,该自动配置改变可以包括端部执行器改变以及尽可能地改变机器人设备的编程。
3、鉴于上述情况,机器人设备需要具有紧凑且简单的构造、规格和性能以允许抓持、组装和处理各种工件。同时,希望通过自动互换工具以适应要在工件上执行的任务来提高整个机器人设备的操作速率。
4、因此,机器人设备必须具有简单的互换机构以满足不同构造的端部执行器,从而使得能够快速、高效且一致地处理和操纵各种工件以用于增强机器人设备的功能特征。
5、关于诸如机器人设备的端部执行器的操作单元的自动更换,需要尽可能地减小端部执行器的尺寸和重量、缩短对端部执行器及其构成元件进行互换的时间并且提高互换时的附接精度。互换系统包括由互换工具或抓持器以及主臂保持的端部执行器。此外,在诸如机器人手或端部执行器的工具的情况下,用于处理工件的手指的部分在一些情况下可以是可更换的。从一种配置到另一种配置的转换包括使用软件指令和电信号来操作机器人手或端部执行器的电气接口。该电气接口包括用于主机器人的合适的机构,该机构用以对端部执行器或操纵器的配置以及该端部执行器或操纵器是否已经被机械锁定就位进行检测,以便确保转换的端部执行器的正确装载和验证。由于电气接口协议和命令接口协议的细节落在本发明的范围之外,因此不对其进行公开。尽管过去的现有技术已经广泛地公开了机器人端部执行器的转换,但是它们是耗时的并且涉及对正确的设置、对准和配置的人工干预。它们还是复杂的、不灵活的、不可扩展的并且需要频繁干预才能正确运行。
技术实现思路
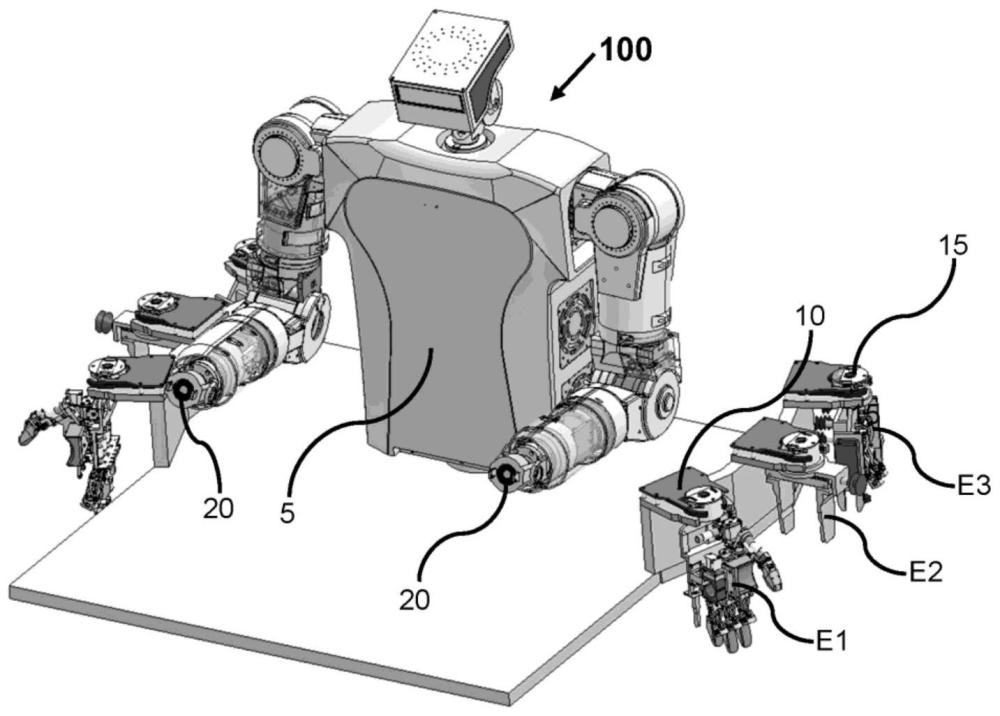
1、本发明的各方面提供了一种简单的互换机构,该互换机构被设计成在最短可能的时间内可靠且一致地、准确且一致地使结合有机器人手的端部执行器与主机器人臂接合/附接或者断开接合/分离。可互换机构设计包括三个区域。尽管在整个文件中涉及端部执行器,但是重要的是要注意端部执行器将始终具有结合至该端部执行器的机器人手,该机器人手根据手头上的任务在其功能上可能有所不同。
2、为了使主臂与端部执行器接合和断开接合,第一互换区域涉及端部执行器接合部分,第二区域为主侧臂,并且第三个区域为工具或抓持器。
3、端部执行器互换区域主要包括:一对扭转弹簧加载的杆,该杆可以围绕其相应的圆形轴旋转至预定的角度;磁性钢板,该磁性钢板在表面上与安装在主臂上的电磁体相配合;以及至少两个凹部,所述至少两个凹部用以容纳主臂拾取钩。
4、第二互换区域为主臂的远端端部,该远端端部包括安装在臂的中心的电磁体和围绕电磁体的中心形成为像钩一样的至少两个延伸部,该电磁体被设计成与端部执行器的钢板合适地对准以获得更好的稳定性。两个延伸钩用作主臂与端部执行器之间的闩锁点,其中,杆用作使得端部执行器能够稳定地附接至主臂的闩锁。
5、第三互换区域为互换机构,该互换机构包括简单的盖板,该盖板沿其水平轴线移动并且用于在主臂延伸钩向下移动到端部执行器凹部中之前使端部执行器侧部上的杆向外移动,以使下方的凹部暴露。在使端部执行器与主臂进行闩锁或解除闩锁的过程期间,该互换工具还用于使用一对抓持器将端部执行器抓持就位。在装载过程期间,在主臂向下移动到端部执行器凹部中之后,互换工具的顶盖移动返回或缩回,以释放两个杆,这两个杆通过扭转弹簧恢复至其原始位置。这完成了主臂至端部执行器的附接过程。主臂现在于牢固地附接有用于要执行的其他任务的端部执行器的情况下自由地移动远离互换工具。在卸载过程期间,互换工具的顶盖向前移动以将端部执行器杆向外推动,同时使主臂与端部执行器解除闩锁。然后,主臂将向上移动以与端部执行器断开接合并完成分离过程。该过程通过互换工具的顶盖移动返回至其原始位置而完成。
6、在附接过程或分离过程期间,所涉及的互换工具通过一组弹簧加载的爪形抓持器以及内联的顶盖进行操作,该顶盖来回移动以对端部执行器的弹簧加载杆进行推动,进而执行闩锁过程和解除闩锁过程。互换工具以及位于主臂和端部执行器的端部处的机构简单性形成了本发明的基础。
7、根据参照附图对示例性实施方式的以下描述,本公开的其它特征将变得明显。
技术特征:1.一种构造成使主机器人臂与端部执行器分离或者附接的简单的互换机构,所述机构包括:
2.根据权利要求1所述的简单的互换机构,
3.根据权利要求1所述的简单的互换机构,
4.根据权利要求1所述的简单的互换机构,
5.根据权利要求1所述的简单的互换机构,
6.根据权利要求5所述的简单的互换机构,
7.根据权利要求5所述的简单的互换机构,
8.根据权利要求1所述的简单的互换机构,
9.根据权利要求1所述的简单的互换机构,
技术总结本发明涉及一种机器人臂操纵器互换工具。为机器人臂提供了一种简单的互换机构,以便可靠、快速且一致地从一个端部执行器转换至另一个端部执行器,以用于执行多个任务而无需安装不同的机器人的目的。互换机构与在三个不同的区域同步工作的机械元件和电磁元件相结合,从而实现了灵活且可扩展的架构,该架构简单而稳定,并且适用于机器人的不同配置。
技术研发人员:黄循威,卢·仙·查尔斯·谢尔
受保护的技术使用者:亿美视觉私人有限公司
技术研发日:技术公布日:2024/10/24