一种基于视觉伺服的移动作业机器人及其操作方法
本发明涉及机器人,具体为一种基于视觉伺服的移动作业机器人操作方法。
背景技术:
1、基于视觉伺服的移动作业机器人是一种利用视觉技术实现运动控制和自主导航的机器人系统,该机器人系统通过搭载视觉传感器如摄像头、激光雷达等以及相关算法和软件,能够感知和分析周围环境,根据视觉信息进行运动控制和路径规划,能够实现更高的精度、灵活性和自主性,提高生产效率和作业质量。
2、目前利用该移动作业机器人搬运货物时,由于视觉伺服只能观察货物的外观大小,无法感知货物的重量,因此在搬运的过程中,可能会出现货物脱离机械爪的情况,进而会导致货物掉落而损坏的情况,进而导致经济损失和生产延误,此外如果货物从机械爪脱离并掉落,可能会造成人员受伤或者其他设备损坏的安全风险。
技术实现思路
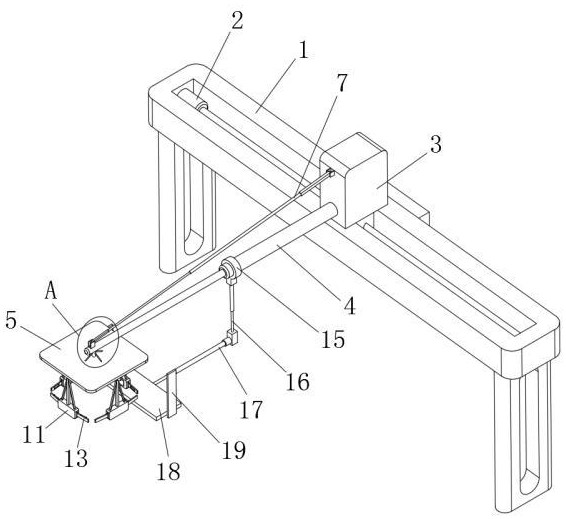
1、为实现上述避免搬运货物时货物掉落导致经济损失和安全隐患的目的,本发明提供如下技术方案:一种基于视觉伺服的移动作业机器人及其操作方法,包括安装架,所述安装架的顶端固定安装有气缸,所述气缸的表面传动连接有活塞,所述活塞的前端固定安装有电动伸缩杆一,所述电动伸缩杆一前端的底部固定安装有连接板,所述连接板的底端固定安装有工业相机,所述连接板的底端固定安装有电动伸缩杆二,所述电动伸缩杆二的内部传动连接有连接杆,所述连接杆的底端固定安装有夹持板,所述夹持板靠近连接板中心的一端固定安装有按压开关,所述夹持板的两个端面转动连接有转板,所述转板靠近连接板中心的一端固定安装有电磁体,所述电动伸缩杆一的表面固定安装有固定套,所述固定套的底端固定安装有电缸一,所述电缸一底端的输出轴固定安装有电缸二,所述电缸二远离电缸一的一端固定安装有托举板。
2、作为优化,所述连接板的顶端固定安装有加强筋,所述加强筋有四个且圆周分布,所述加强筋的顶端固定安装在电动伸缩杆一的底部,多个加强筋对连接板进行支撑,使得连接板搬运货物时保持稳定。
3、作为优化,所述活塞前端的顶部转动连接有稳定伸缩杆,所述稳定伸缩杆远离活塞的一端转动连接在电动伸缩杆一前端的顶部,稳定伸缩杆进一步对连接板进行支撑使其稳定。
4、作为优化,所述工业相机电性连接有工控机,工控机和电动伸缩杆二、电缸一和电缸二电性连接,工业相机检测图像数据经由工控机进行分析,进而有工控机驱动电动伸缩杆二、电缸一和电缸二依次运行。
5、作为优化,所述按压开关和两个电磁体电性连接,两个所述电磁体靠近夹持板的一端互为异种磁极,按压开关被按压后使得两个电磁体通电,此时两个电磁体相互吸引并靠近向夹持板的方向。
6、作为优化,所述固定套固定安装在电动伸缩杆一固定于活塞一段的表面,所述电缸二的轴线垂直于电缸一的轴线且朝向连接板的方向。
7、作为优化,所述托举板的顶端高度低于夹持板的底端高度。
8、作为优化,所述托举板的左右两端均固定安装有侧板,所述侧板的顶端高于托举板的顶端。
9、一种基于视觉伺服的移动作业机器人的操作方法,包括以下几个步骤:
10、步骤一:驱动气缸带动活塞在左右方向移动,此时活塞带动电动伸缩杆一移动,此时操作人员可驱动电动伸缩杆一伸长进而带动连接板远离安装架,此时连接板逐渐靠近货物直至连接板位于货物的正上方,此时工业相机检测货物外观信息,并将信息传输至工控机;
11、步骤二:通过工控机驱动电动伸缩杆二,使得电动伸缩杆二带动连接杆向着货物的方向靠近,直至四个夹持板抵接在货物的四边,且在四个夹持板抵接在货物表面的同时,按压开关在反作用下被按压;
12、步骤三:与按压开关电连接的电磁体通电,此时两个电磁体相互吸引而靠近,因此电磁体会带动转板转动,进而使得转板抵接在货物的外表面,进一步对货物进行限定;
13、步骤四:工控机驱动电缸二伸长使得托举板移动向货物的正下方,同时工控机驱动电缸一缩短,进而使得托举板抵接在货物的正下方,此时托举板对货物继续托举,且两块侧板位于货物的左右两侧,避免货物震动幅度过大而脱离。
14、本发明的有益效果是:该基于视觉伺服的移动作业机器人,通过工业相机检测货物大小进而通过多个夹持板对其进行夹持和搬运,此时转板转动向靠近货物的方向对货物进行进一步的限定,使得货物被夹持的更加稳定,此外托举板托举在被搬运货物的底部,进一步对货物进行支撑,避免货物掉落导致的经济损失和安全隐患。
技术特征:
1.一种基于视觉伺服的移动作业机器人,包括安装架(1),其特征在于:所述安装架(1)的顶端固定安装有气缸(2),所述气缸(2)的表面传动连接有活塞(3),所述活塞(3)的前端固定安装有电动伸缩杆一(4),所述电动伸缩杆一(4)前端的底部固定安装有连接板(5),所述连接板(5)的底端固定安装有工业相机(8),所述连接板(5)的底端固定安装有电动伸缩杆二(9),所述电动伸缩杆二(9)的内部传动连接有连接杆(10),所述连接杆(10)的底端固定安装有夹持板(11),所述夹持板(11)靠近连接板(5)中心的一端固定安装有按压开关(12),所述夹持板(11)的两个端面转动连接有转板(13),所述转板(13)靠近连接板(5)中心的一端固定安装有电磁体(14),所述电动伸缩杆一(4)的表面固定安装有固定套(15),所述固定套(15)的底端固定安装有电缸一(16),所述电缸一(16)底端的输出轴固定安装有电缸二(17),所述电缸二(17)远离电缸一(16)的一端固定安装有托举板(18)。
2.根据权利要求1所述的一种基于视觉伺服的移动作业机器人,其特征在于:所述连接板(5)的顶端固定安装有加强筋(6),所述加强筋(6)有四个且圆周分布,所述加强筋(6)的顶端固定安装在电动伸缩杆一(4)的底部。
3.根据权利要求1所述的一种基于视觉伺服的移动作业机器人,其特征在于:所述活塞(3)前端的顶部转动连接有稳定伸缩杆(7),所述稳定伸缩杆(7)远离活塞(3)的一端转动连接在电动伸缩杆一(4)前端的顶部。
4.根据权利要求1所述的一种基于视觉伺服的移动作业机器人,其特征在于:所述工业相机(8)电性连接有工控机,工控机和电动伸缩杆二(9)、电缸一(16)和电缸二(17)电性连接。
5.根据权利要求1所述的一种基于视觉伺服的移动作业机器人,其特征在于:所述按压开关(12)和两个电磁体(14)电性连接,两个所述电磁体(14)靠近夹持板(11)的一端互为异种磁极。
6.根据权利要求1所述的一种基于视觉伺服的移动作业机器人,其特征在于:所述固定套(15)固定安装在电动伸缩杆一(4)固定于活塞(3)一段的表面,所述电缸二(17)的轴线垂直于电缸一(16)的轴线且朝向连接板(5)的方向。
7.根据权利要求1所述的一种基于视觉伺服的移动作业机器人,其特征在于:所述托举板(18)的顶端高度低于夹持板(11)的底端高度。
8.根据权利要求1所述的一种基于视觉伺服的移动作业机器人及其操作方法,其特征在于:所述托举板(18)的左右两端均固定安装有侧板(19),所述侧板(19)的顶端高于托举板(18)的顶端。
9.一种基于视觉伺服的移动作业机器人的操作方法,其特征在于:包括以下几个步骤:
技术总结
本发明涉及机器人技术领域,且公开了一种基于视觉伺服的移动作业机器人及其操作方法,包括安装架,所述安装架的顶端固定安装有气缸,所述气缸的表面传动连接有活塞,所述活塞的前端固定安装有电动伸缩杆一,所述电动伸缩杆一前端的底部固定安装有连接板,所述连接板的底端固定安装有工业相机,所述连接板的底端固定安装有电动伸缩杆二;该基于视觉伺服的移动作业机器人,通过工业相机检测货物大小进而通过多个夹持板对其进行夹持和搬运,此时转板转动向靠近货物的方向对货物进行进一步的限定,使得货物被夹持的更加稳定,此外托举板托举在被搬运货物的底部,进一步对货物进行支撑,避免货物掉落导致的经济损失和安全隐患。
技术研发人员:甄圣超,马新宝,李鹿鸣
受保护的技术使用者:合肥工业大学智能制造技术研究院
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!