基于大数据下的智能搬运机器人视觉识别系统的制作方法
本发明涉及智能搬运机器人相关,具体为基于大数据下的智能搬运机器人视觉识别系统。
背景技术:
1、目前生产制造业有了智能化的需求,国内外生产制造业开始推进生产线自动化升级,以机器人为代表的智能化生产制造满足行业的转型需求。搬运机器人也不再仅限于机械手、搬运台等传统搬运机器人,赋予搬运机器人各种高级感知能力,例如触觉、力觉、视觉和听觉,可以使机器人变得更加智能,其中给机器人增加视觉功能,极大地提升机器人对于环境的感知能力和智能化水平。
2、搬运作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动。目前世界上使用的搬运机器人逾10万台,被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。部分发达国家已制定出人工搬运的最大限度,超过限度的必须由搬运机器人来完成。搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学,机械学,电器液压气压技术,自动控制技术,传感器技术,单片机技术和计算机技术等学科领域,已成为现代机械制造生产体系中的一项重要组成部分。它的优点是可以通过编程完成各种预期的任务,在自身结构和性能上有了人和机器的各自优势,尤其体现出了人工智能和适应性。传统的作业方式是机器人对各个位置点进行精确的示教,然后按照先后顺序一步步执行。在这个过程中,要求工件相对于机器人的位姿是固定的,如果工件的位姿发生变化,工件的实际位姿和预设位姿存在偏差,可能导致机器人的操作失败,这就需要机器人能够具备适应环境的能力,为此,本发明提出基于大数据下的智能搬运机器人视觉识别系统用以解决上述问题。
技术实现思路
1、本发明的目的在于提供基于大数据下的智能搬运机器人视觉识别系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:基于大数据下的智能搬运机器人视觉识别系统,所述基于大数据下的智能搬运机器人视觉识别系统包括视觉硬件系统和视觉软件系统;
3、所述视觉硬件系统包括相机、机器人本体、机器人控制器和外置工控机,所述机器人控制器安装在机器人本体上,所述机器人控制器、相机均通过以太网与外置工控机连接;
4、所述相机包括:
5、安装支架,所述安装支架固定在机器人运行轨道边缘的支架上;
6、安装轴,所述安装轴与安装支架相连接;
7、连接梁,所述连接梁与安装轴的端部固定连接;
8、相机本体,所述相机本体固定在连接梁上;
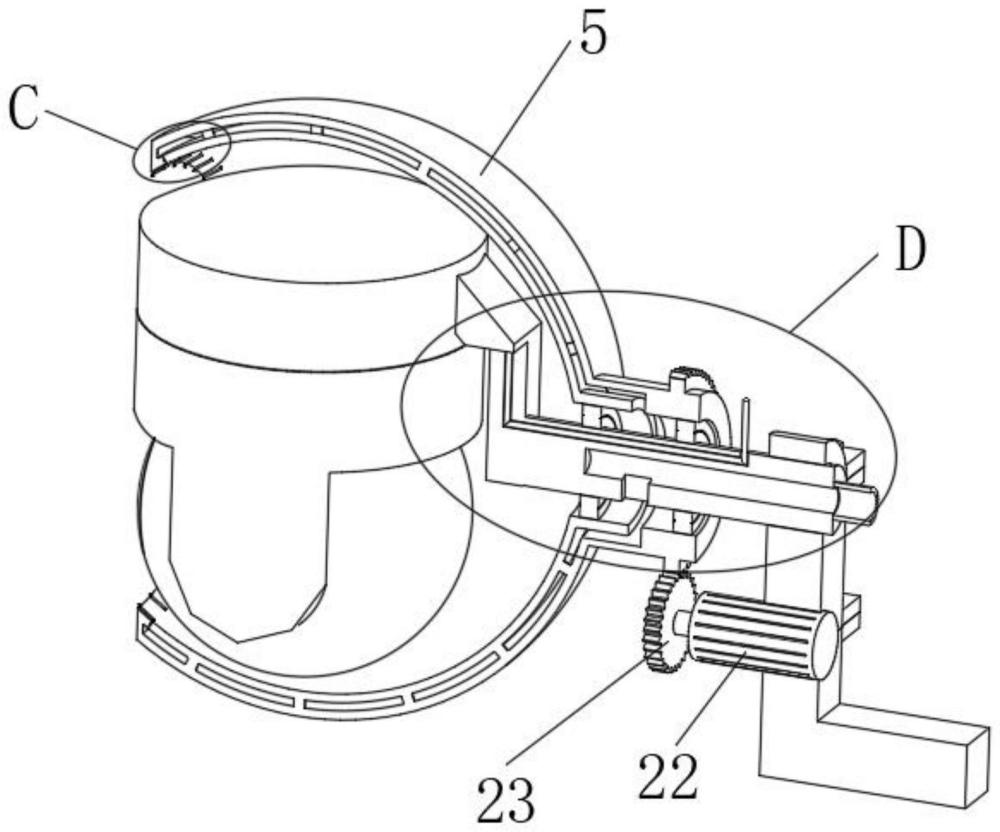
9、防尘模块,所述防尘模块为球形壳体结构,且防尘模块的前侧端呈开口设置,所述相机本体的镜头朝向防尘模块上的开口,且防尘模块的后侧端开设有圆孔,且防尘模块上位于圆孔的边缘一体成型有安装管,所述安装管通过一级密封轴和二级密封轴承转动安装在安装轴上。
10、优选的,所述安装轴、连接梁之间为一体成型,且安装轴、连接梁上开设有走线槽,所述走线槽之中布设有线体,且相机本体通过线体与电源电连接。
11、优选的,所述安装轴上开设有气腔,所述气腔的下侧壁上开设有气道,所述气道的开设位置位于一级密封轴和二级密封轴承之间,所述防尘模块的壳体侧壁之中开设有气室,所述气室内侧壁位于防尘模块开口处开设有气孔,所述防尘模块上位于气孔的端口处固定连接有转向管,所述转向管的端口处连接有高压曝气头,所述安装轴上位于气腔的端口处设置有气管连接口,所述气管连接口通过气管与气泵相连接。
12、优选的,所述转向管为硬质管材,所述气孔围绕防尘模块开口等圆周设置有一圈,所述高压曝气头为朝向防尘模块上开口的中心方向设置。
13、优选的,所述气室的内外侧壁之中一体成型有加固杆,所述加固杆在气室之中均匀设置有多组。
14、优选的,所述安装管的外侧壁上固定安装有环形齿轮,所述安装支架上固定安装有驱动电机,所述驱动电机的输出轴上固定安装有传动齿轮,所述传动齿轮与环形齿轮相啮合设置,所述驱动电机为减速电机。
15、优选的,所述气泵的进气端口设置有粉尘过滤器。
16、优选的,所述安装支架由一级支架体、二级支架体和三级支架体组合构成,所述一级支架体与机器人运行轨道边缘的支架固定连接,所述一级支架体的上端和二级支架体的下端均一体成型有一级连接耳板,所述驱动电机夹持定位在一级支架体和二级支架体之间,所述二级支架体上端和三级支架体的下端均一体成型有二级连接耳板,所述安装轴夹持定位在二级支架体和三级支架体之间。
17、优选的,所述视觉软件系统运行于外置工控机之中,且视觉软件系统包括:
18、所述管理模块、图像处理模块、功能包模块、结果分析转换模块和通信模块。
19、优选的,所述管理模块包括用户管理模块、工程文件管理模块和日志管理模块,所述图像处理模块包括图像预处理模块和图像特征提取模块,所述功能包模块包括图像采集模块、相机标定模块、手眼标定模块、模版匹配模块、物体分类识别模块和平面测量模块,所述结果分析转换模块包括坐标转换模块和特征分析模块,所述通信模块包括外置工控机通信模块和机器人控制器通信模块。
20、与现有技术相比,本发明的有益效果是:
21、1.机器人通过视觉传感器获知环境信息,然后计算机对视觉信息进行处理,提取出对机器人有用的信息,从而对机器人的行为起到指导作用,使机器人能够更好地适应环境的变化,提高了机器人作业的智能化程度;
22、2.并通过将视觉硬件系统中的相机设置成由安装支架、安装轴、连接梁、相机本体和防尘模块组合构成,并在防尘模块的壳体侧壁之中开设有气室,并在气室侧壁上气孔边缘设置转向管,并在转向管的端口安装高压曝气头,从而通过高压曝气头对相机本体上镜头方向不断的进行吹气,从而通过一圈高压曝气头的作用形成一道风墙,从而有效避免粉尘进入防尘模块内部,并在相机本体的镜头上粘附,从而有效保证相机本体的识别准确性。
技术特征:
1.基于大数据下的智能搬运机器人视觉识别系统,其特征在于:所述基于大数据下的智能搬运机器人视觉识别系统包括视觉硬件系统和视觉软件系统;
2.根据权利要求1所述的基于大数据下的智能搬运机器人视觉识别系统,其特征在于:所述安装轴(2)、连接梁(3)之间为一体成型,且安装轴(2)、连接梁(3)上开设有走线槽(15),所述走线槽(15)之中布设有线体(16),且相机本体(4)通过线体与电源电连接。
3.根据权利要求1所述的基于大数据下的智能搬运机器人视觉识别系统,其特征在于:所述安装轴(2)上开设有气腔(9),所述气腔(9)的下侧壁上开设有气道(10),所述气道(10)的开设位置位于一级密封轴(7)和二级密封轴承(8)之间,所述防尘模块(5)的壳体侧壁之中开设有气室(11),所述气室(11)内侧壁位于防尘模块(5)开口处开设有气孔(12),所述防尘模块(5)上位于气孔(12)的端口处固定连接有转向管(13),所述转向管(13)的端口处连接有高压曝气头(14),所述安装轴(2)上位于气腔(9)的端口处设置有气管连接口(29),所述气管连接口(29)通过气管与气泵相连接。
4.根据权利要求3所述的基于大数据下的智能搬运机器人视觉识别系统,其特征在于:所述转向管(13)为硬质管材,所述气孔(12)围绕防尘模块(5)开口等圆周设置有一圈,所述高压曝气头(14)为朝向防尘模块(5)上开口的中心方向设置。
5.根据权利要求4所述的基于大数据下的智能搬运机器人视觉识别系统,其特征在于:所述气室(11)的内外侧壁之中一体成型有加固杆(30),所述加固杆(30)在气室(11)之中均匀设置有多组。
6.根据权利要求5所述的基于大数据下的智能搬运机器人视觉识别系统,其特征在于:所述安装管(6)的外侧壁上固定安装有环形齿轮(21),所述安装支架(1)上固定安装有驱动电机(22),所述驱动电机(22)的输出轴上固定安装有传动齿轮(23),所述传动齿轮(23)与环形齿轮(21)相啮合设置,所述驱动电机(22)为减速电机。
7.根据权利要求6所述的基于大数据下的智能搬运机器人视觉识别系统,其特征在于:所述气泵的进气端口设置有粉尘过滤器。
8.根据权利要求7所述的基于大数据下的智能搬运机器人视觉识别系统,其特征在于:所述安装支架(1)由一级支架体(24)、二级支架体(25)和三级支架体(26)组合构成,所述一级支架体(24)与机器人运行轨道边缘的支架固定连接,所述一级支架体(24)的上端和二级支架体(25)的下端均一体成型有一级连接耳板(27),所述驱动电机(22)夹持定位在一级支架体(24)和二级支架体(25)之间,所述二级支架体(25)上端和三级支架体(26)的下端均一体成型有二级连接耳板(28),所述安装轴(2)夹持定位在二级支架体(25)和三级支架体(26)之间。
9.根据权利要求8所述的基于大数据下的智能搬运机器人视觉识别系统,其特征在于:所述视觉软件系统运行于外置工控机之中,且视觉软件系统包括:
10.根据权利要求9所述的基于大数据下的智能搬运机器人视觉识别系统,其特征在于:所述管理模块包括用户管理模块、工程文件管理模块和日志管理模块,所述图像处理模块包括图像预处理模块和图像特征提取模块,所述功能包模块包括图像采集模块、相机标定模块、手眼标定模块、模版匹配模块、物体分类识别模块和平面测量模块,所述结果分析转换模块包括坐标转换模块和特征分析模块,所述通信模块包括外置工控机通信模块和机器人控制器通信模块。
技术总结
本发明涉及智能搬运机器人相关技术领域,具体为基于大数据下的智能搬运机器人视觉识别系统,基于大数据下的智能搬运机器人视觉识别系统包括视觉硬件系统和视觉软件系统,视觉硬件系统包括相机、机器人本体、机器人控制器和外置工控机;通过将视觉硬件系统中的相机设置成由安装支架、安装轴、连接梁、相机本体和防尘模块组合构成,并在防尘模块的壳体侧壁之中开设有气室,并在气室侧壁上气孔边缘设置转向管,并在转向管的端口安装高压曝气头,从而通过高压曝气头对相机本体上镜头方向不断的进行吹气,从而通过一圈高压曝气头的作用形成一道风墙,从而有效避免粉尘进入防尘模块内部,并在相机本体的镜头上粘附,从而有效保证相机本体的识别准确性。
技术研发人员:王亚男,刘志暾,王照勋,张长宁,延江涛,史越
受保护的技术使用者:中建八局第二建设有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!