一种代替人工抓取异型工件的装置的制作方法
本技术涉及抓取设备,具体是涉及一种代替人工抓取异型工件的装置。
背景技术:
1、随着科学技术的不断发展,工业水平的不断提高,生产效率也在不断提高,越来越多的领域开始采用自动机械化生产来替代传统的手工生产方式,因此根据市场需求一大批的机械手应运而生,极大的提高了手工生产效率,而取送料结构又是机械手必配的一个关键结构,目前市面上的机械手大多都是方便解决标准件的取送料问题,如果针对一些异形工件,比如骨钉,没有合适的发力点,一只机械手夹持不稳定,在转移过程中,骨钉容易掉落,误差率高,稳定性差,影响作业效率,增加作业成本。
技术实现思路
1、为解决上述技术问题,提供一种代替人工抓取异型工件的装置,本技术方案解决了上述背景技术中提出的目前市面上的机械手大多都是方便解决标准件的取送料问题,如果针对一些异形工件,比如骨钉,没有合适的发力点,一只机械手夹持不稳定,在转移过程中,骨钉容易掉落,误差率高,稳定性差,影响作业效率,增加作业成本的问题。
2、为达到以上目的,本实用新型采用的技术方案为:
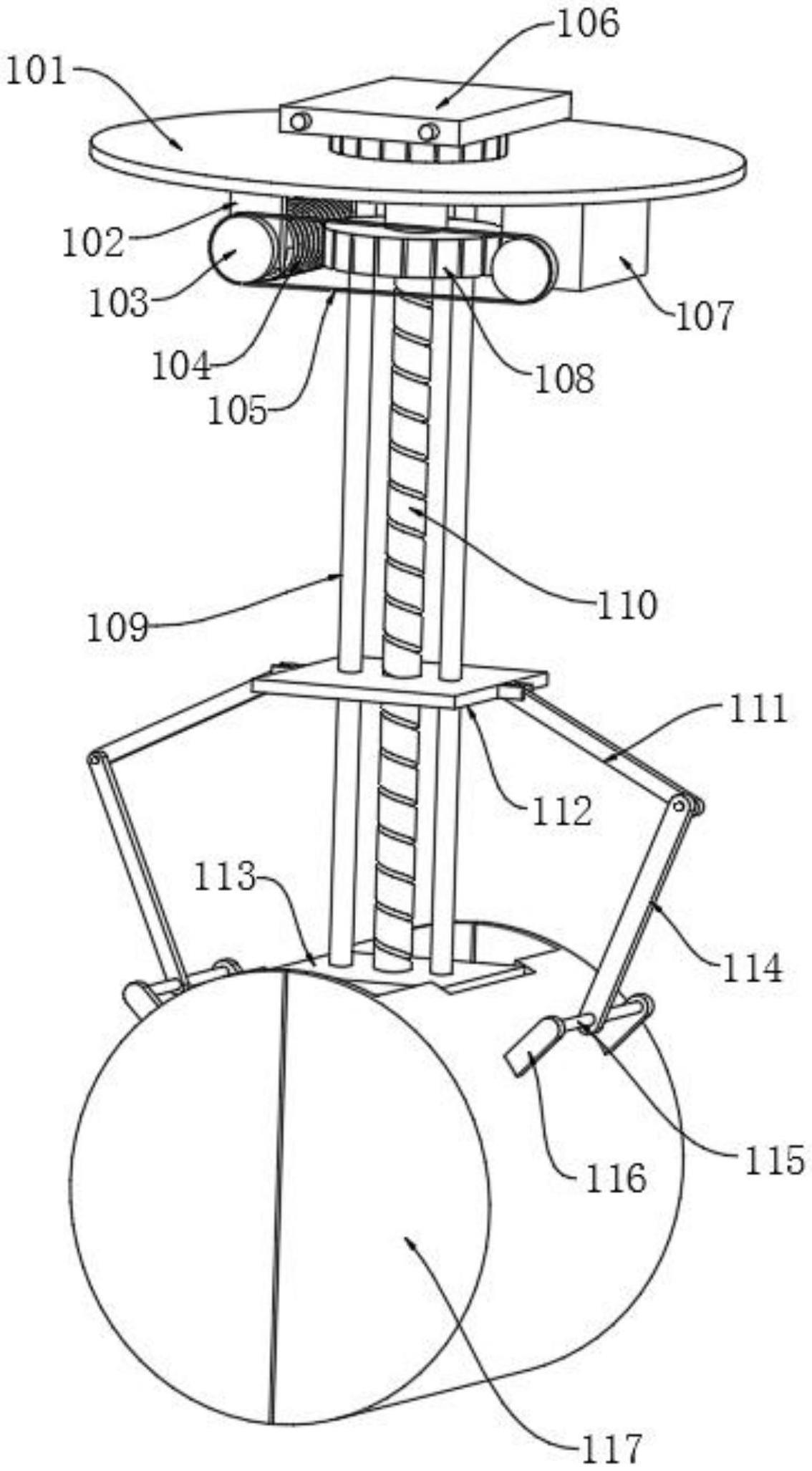
3、一种代替人工抓取异型工件的装置,包括旋转盘,所述旋转盘下表面左侧固定连接有固定板,固定板后侧转动连接有蜗杆,蜗杆前端固定连接有轮盘,旋转盘下表面固定连接有驱动电机,驱动电机的输出端套接有传动带,轮盘表面套接有传动带,旋转盘下表面中部转动连接有螺杆,螺杆上部固定连接有蜗轮,蜗轮与蜗杆相啮合,螺杆底端转动连接有承重板,螺杆中部螺纹连接有升降板,升降板两侧均转动连接有推送臂,推送臂末端转动连接有摆动臂,承重板两侧均转动连接有抓手,抓手侧面固定连接有两个支撑块,两个所述支撑块之间固定连接有固定杆,摆动臂底端转动连接在固定杆中部。
4、优选的,所述承重板上表面后侧均固定连接有导向杆,导向杆与升降板滑动连接,导向杆顶端固定连接在旋转盘下表面。
5、优选的,所述旋转盘上表面中部固定连接有旋转气缸。
6、优选的,所述抓手前后侧均封闭,抓手为半圆桶状,两个所述抓手拼接为一体,抓手内部为中空结构。
7、优选的,所述推送臂、摆动臂和抓手对称分布在螺杆的两侧。
8、优选的,所述支撑块位于抓手侧面上部,支撑块倾斜角度为四十五度。
9、与现有技术相比,本实用新型提供了一种代替人工抓取异型工件的装置,具备以下有益效果:
10、通过设置旋转气缸、驱动电机、蜗杆、蜗轮、螺杆和抓手,旋转气缸旋转,能调整抓手的走向,使得抓手更便于对异型工件抓取,通过推送臂和摆动臂的联动,能实现抓手的闭合和打开,从而能将异型工件抓取至抓手内部或对其进行释放,由于抓手能围成封闭结构,因此,在抓取时,能保证异型工件的稳定性,避免发生掉落。
技术特征:
1.一种代替人工抓取异型工件的装置,其特征在于,包括旋转盘(101),所述旋转盘(101)下表面左侧固定连接有固定板(102),固定板(102)后侧转动连接有蜗杆(104),蜗杆(104)前端固定连接有轮盘(103),旋转盘(101)下表面固定连接有驱动电机(107),驱动电机(107)的输出端套接有传动带(105),轮盘(103)表面套接有传动带(105),旋转盘(101)下表面中部转动连接有螺杆(110),螺杆(110)上部固定连接有蜗轮(108),蜗轮(108)与蜗杆(104)相啮合,螺杆(110)底端转动连接有承重板(113),螺杆(110)中部螺纹连接有升降板(112),升降板(112)两侧均转动连接有推送臂(111),推送臂(111)末端转动连接有摆动臂(114),承重板(113)两侧均转动连接有抓手(117),抓手(117)侧面固定连接有两个支撑块(116),两个所述支撑块(116)之间固定连接有固定杆(115),摆动臂(114)底端转动连接在固定杆(115)中部。
2.根据权利要求1所述的一种代替人工抓取异型工件的装置,其特征在于:所述承重板(113)上表面后侧均固定连接有导向杆(109),导向杆(109)与升降板(112)滑动连接,导向杆(109)顶端固定连接在旋转盘(101)下表面。
3.根据权利要求1所述的一种代替人工抓取异型工件的装置,其特征在于:所述旋转盘(101)上表面中部固定连接有旋转气缸(106)。
4.根据权利要求1所述的一种代替人工抓取异型工件的装置,其特征在于:所述抓手(117)前后侧均封闭,抓手(117)为半圆桶状,两个所述抓手(117)拼接为一体,抓手(117)内部为中空结构。
5.根据权利要求1所述的一种代替人工抓取异型工件的装置,其特征在于:所述推送臂(111)、摆动臂(114)和抓手(117)对称分布在螺杆(110)的两侧。
6.根据权利要求1所述的一种代替人工抓取异型工件的装置,其特征在于:所述支撑块(116)位于抓手(117)侧面上部,支撑块(116)倾斜角度为四十五度。
技术总结
本技术公开了一种代替人工抓取异型工件的装置,涉及抓取设备技术领域,包括旋转盘,所述旋转盘下表面左侧固定连接有固定板,固定板后侧转动连接有蜗杆,蜗杆前端固定连接有轮盘,旋转盘下表面固定连接有驱动电机,驱动电机的输出端套接有传动带,轮盘表面套接有传动带,旋转盘下表面中部转动连接有螺杆,螺杆上部固定连接有蜗轮,蜗轮与蜗杆相啮合,螺杆底端转动连接有承重板,螺杆中部螺纹连接有升降板,升降板两侧均转动连接有推送臂,推送臂末端转动连接有摆动臂,承重板两侧均转动连接有抓手。本技术通过设置旋转气缸、驱动电机、蜗杆、蜗轮、螺杆和抓手,在抓取时,能保证异型工件的稳定性,避免发生掉落。
技术研发人员:占功武,张乾慧
受保护的技术使用者:昆山博世精密仪表电子元器件有限公司
技术研发日:20230103
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!