一种二指夹板型机器人末端执行器的制作方法
本技术涉及机器人,具体涉及一种二指夹板型机器人末端执行器。
背景技术:
1、工业机器人的手部也称末端执行器,它是装在工业机器人手腕上直接抓握工件或执行作业的部件,有时也被称为末端操作器。末端执行器对机器人完成作业起到关键性作用。
2、现有的机器人末端执行器有很多类型,作为常规动力来源的有气动、液压驱动和电动,在一些工厂及制造厂液压和气压的配套功能并不能给现实所需的夹具提供强有力的支撑,这时电力驱动是最合适的。
3、在生产过程中同一条生产线可以生产出很多种不同尺寸、不同重量、不同码放要求的物料,物料的材质可能是纸质、木质、金属、塑料、尼龙等等,在面对多尺寸、多重量、多垛型、多材质的生产需求时,现有技术中的末端执行器往往通过更换不同的夹具来完成作业,这样增加了人力的劳动强度以及安全隐患。
4、因此,为满足对同一条生产线可以生产出的多尺寸多材质物料的抓取,开发具有一定通用性的机器人末端执行器至关重要。
技术实现思路
1、为了解决上述技术问题,本实用新型提供了一种二指夹板型机器人末端执行器。
2、所述末端执行器包括执行器本体,所述执行器本体相对的两侧边缘上方均设置有导轨;位于两侧导轨中间且与所述导轨平行的正反丝滚珠丝杆;垂直于所述执行器本体相互平行设置且在所述导轨上轴向滑动的夹取机构;设置在所述正反丝滚珠丝杆上的夹取硬件限位机构;以及靠近所述正反丝滚珠丝杆的夹取感应限位机构。
3、进一步地,所述执行器本体上固定有伺服电机,所述伺服电机通过联轴器连接在正反丝滚珠丝杆一端,所述正反丝滚珠丝杆另一端通过丝杆螺母固定在螺母连接件上。
4、进一步地,所述夹取硬件限位机构包括套设在所述正反丝滚珠丝杆上的螺母限位。
5、进一步地,所述夹取感应限位机构包括一端靠近所述正反丝滚珠丝杆,另一端垂直固定在所述执行器本体一侧内壁的且安装在接近开关安装支架上的接近开关。
6、进一步地,所述夹取感应限位机构还包括一端靠近所述正反丝滚珠丝杆上的丝杆螺母,另一端垂直固定在所述执行器本体一侧内壁的且安装在行程开关安装支架上的行程开关。
7、进一步地,所述夹取机构通过与导轨相接触的滑块在所述导轨上轴向滑动,所述夹取机构包括相对设置的夹板和防滑尼龙夹板,所述夹板垂直固定在夹取连接板上,所述夹板水平对称两侧还加固有呈直角三角形的夹板加强件。
8、进一步地,所述防滑尼龙夹板通过夹取连接板与螺母连接件相连接。
9、进一步地,所述导轨上安装有滑块限位。
10、进一步地,所述执行器本体还包括机器人安装法兰和过渡法兰板,所述机器人安装法兰焊接在所述过渡法兰板上与机器人连接。
11、与现有技术相比,本实用新型具有的有益效果是:由于该机器人末端执行器的伺服电机通过联轴器与滚珠丝杆连接提供动力,所述滚珠丝杆上有丝杆螺母,通过所述螺母连接件和所述夹取连接板连接传递动力,使所述夹取连接板在导轨上轴向运动,而且所述正反丝滚珠丝杆上设置有夹取硬件限位机构,靠近所述正反丝滚珠丝杆设置有夹取感应限位机构。所以本实用新型的机器人末端执行器实现了其同一夹具可以对同一条生产线生产出的多尺寸多材质物料进行抓取的功能,大大提高工作效率。
技术特征:
1.一种二指夹板型机器人末端执行器,其特征在于,包括:
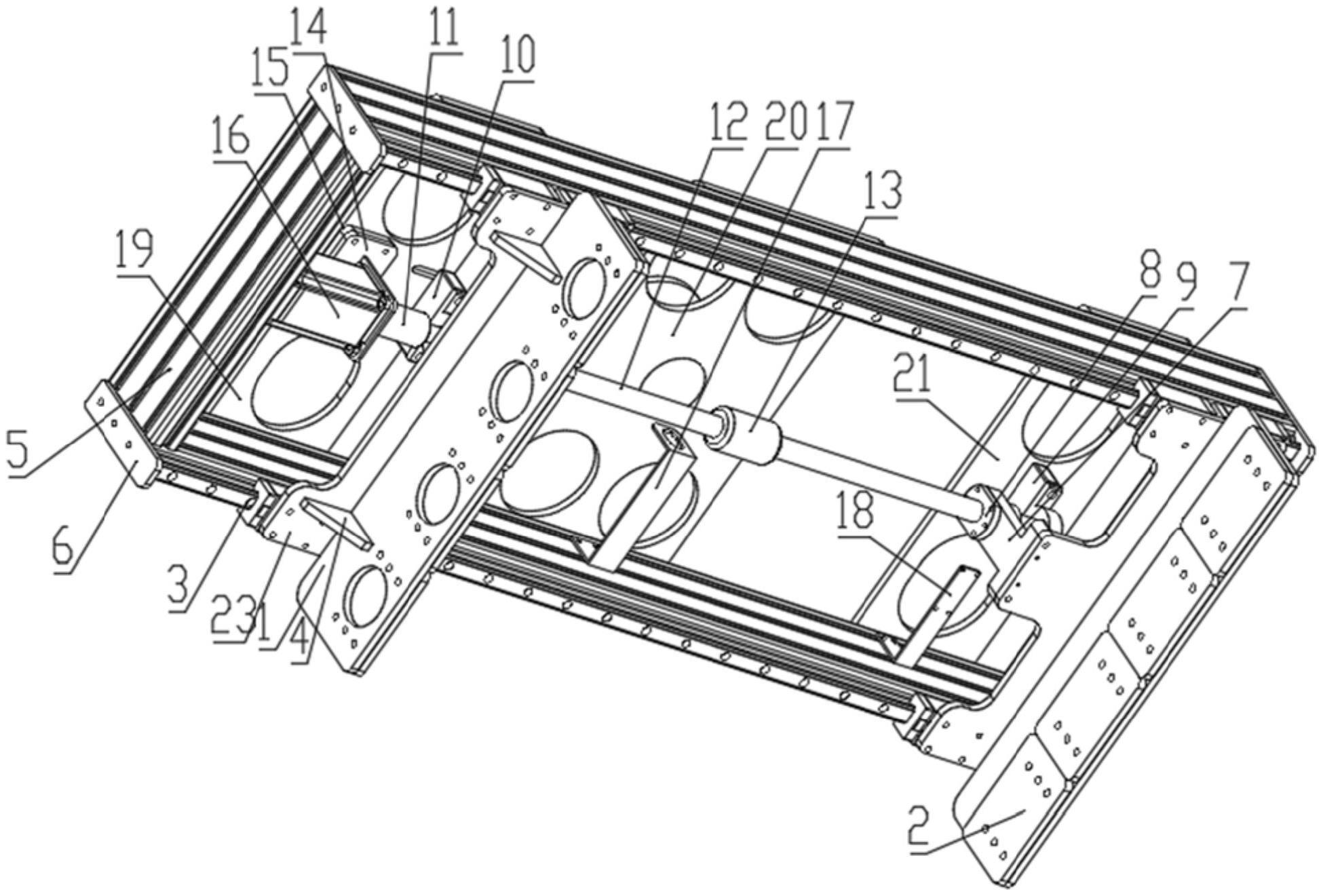
2.根据权利要求1所述的二指夹板型机器人末端执行器,其特征在于,所述执行器本体上固定有伺服电机(16),所述伺服电机(16)通过联轴器(11)连接在正反丝滚珠丝杆(12)一端,所述正反丝滚珠丝杆(12)另一端通过丝杆螺母(8)固定在螺母连接件(7)上。
3.根据权利要求1所述的二指夹板型机器人末端执行器,其特征在于,所述夹取硬件限位机构包括套设在所述正反丝滚珠丝杆(12)上的螺母限位(13)。
4.根据权利要求1所述的二指夹板型机器人末端执行器,其特征在于,所述夹取感应限位机构包括一端靠近所述正反丝滚珠丝杆(12),另一端垂直固定在所述执行器本体一侧内壁的且安装在接近开关安装支架(17)上的接近开关。
5.根据权利要求1所述的二指夹板型机器人末端执行器,其特征在于,所述夹取感应限位机构还包括一端靠近所述正反丝滚珠丝杆(12)上的丝杆螺母(8),另一端垂直固定在所述执行器本体一侧内壁的且安装在行程开关安装支架(18)上的行程开关。
6.根据权利要求1所述的二指夹板型机器人末端执行器,其特征在于,所述夹取机构通过与导轨(3)相接触的滑块在所述导轨(3)上轴向滑动,所述夹取机构包括相对设置的夹板(1)和防滑尼龙夹板(2),所述夹板(1)垂直固定在夹取连接板(23)上,所述夹板(1)水平对称两侧还加固有呈直角三角形的夹板加强件(4)。
7.根据权利要求6所述的二指夹板型机器人末端执行器,其特征在于,所述防滑尼龙夹板(2)通过夹取连接板与螺母连接件(7)相连接。
8.根据权利要求1所述的二指夹板型机器人末端执行器,其特征在于,所述导轨(3)上安装有滑块限位(6)。
9.根据权利要求1-8任一项所述的二指夹板型机器人末端执行器,其特征在于,所述执行器本体还包括机器人安装法兰(22)和过渡法兰板(20),所述机器人安装法兰(22)焊接在所述过渡法兰板(20)上与机器人连接。
技术总结
本技术提供了一种二指夹板型机器人末端执行器,包括机器人安装法兰机构以及和所述机器人安装法兰机构相连接的驱动机构,所述驱动机构包括伺服电机,所述伺服电机通过联轴器连接在正反丝滚珠丝杆一端,所述正反丝滚珠丝杆另一端通过丝杆螺母固定在螺母连接件上,所述螺母连接件上还连接有夹取机构,所述夹取机构上还设置有夹取限位机构,所述夹取限位机构还包括感应限位机构。实现了机器人末端执行器对同一生产线生产出的多尺寸多材质物料使用同一夹具进行抓取的功能。
技术研发人员:张少龙,徐家乐,张少虎,洪立重,洪博
受保护的技术使用者:合肥汉特智能装备有限公司
技术研发日:20230104
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!