一种节省空间型机器人管线包固定套件装置的制作方法
本申请涉及机器人管线包固定的,尤其是涉及一种节省空间型机器人管线包固定套件装置。
背景技术:
1、六轴工业机器人是一种用于自然科学相关工程与技术领域的工艺试验仪器,用来学习工业机器人编程技术,对工业码垛、焊接等项目进行技术开发实验,开发相应的卡具,装具等设备,进行项目研发的实验。
2、相关技术中,六轴工业机器人包括依次铰接的第一轴体、第二轴体、第三轴体、第四轴体、第五轴体和第六轴体;为满足六轴工业机器人的正常使用,需在六轴工业机器人上设置管线包,管线包包括第一线缆和第二线缆,第一线缆设置于第一轴体至第三轴体处;第二线缆设置于第三轴体至第六轴体处。六轴工业机器人有不同的型号,因此需要在机器人上设置相应的管线包固定套件装置,以对管线包进行固定,防止管线包凌乱,影响机器人的使用。但相关技术中对管线包进行固定常采用在机器人上搭建多个支架的方式,将第一线缆和第二线缆固定于机器人外。
3、针对上述中的相关技术,发明人认为管线包的第一线缆和第二线缆均固定于机器人外,会产生占据空间增大,干涉其他部件的问题。
技术实现思路
1、为了节省管线包固定时所占据的空间,减少对其他部件造成的干扰,本申请提供一种节省空间型机器人管线包固定套件装置。
2、本申请提供的一种节省空间型机器人管线包固定套件装置采用如下的技术方案:
3、一种节省空间型机器人管线包固定套件装置,包括一轴底部支架、二轴臂上部支架、二轴臂下部支架、三轴支架和六轴支架,所述一轴底部支架设置于第一轴体上,所述二轴臂上部支架和二轴臂下部支架均设置于第二轴体上,所述三轴支架设置于第三轴体上,所述六轴支架设置于第六轴体上;
4、所述一轴底部支架、二轴臂上部支架、二轴臂下部支架、三轴支架和六轴支架上均设置有安装卡箍,第一线缆的两端通过所述安装卡箍分别设置于一轴底部支架和三轴支架上,第一线缆的中部通过所述安装卡箍设置于二轴臂上部支架和二轴臂下部支架上;
5、第二线缆的两端通过所述安装卡箍分别设置于第三轴体和第六轴体上;第四轴体和第五轴体上开设有安装通孔,第二线缆的中部穿过安装通孔并由安装通孔限位。
6、通过采用上述技术方案,第一线缆的两端能够通过安装卡箍分别设置于一轴底部支架和三轴支架上,第一线缆的中部通过安装卡箍设置于二轴臂上部支架和二轴臂下部支架上。第二线缆的两端通过安装卡箍分别设置于第三轴体和第六轴体上,第二线缆的中部穿过安装通孔并由安装通孔限位。通过安装通孔的设置,省去了原本需要设置于机器人上用于限位第二线缆中部的支架,从而节省了第三轴体至第六轴体这段的空间,减少了与其他部件的干涉,且结构简单紧凑,便于现场安装和后期的维护保养。
7、可选的,所述二轴臂上部支架靠近第二轴体的中部,所述二轴臂下部支架靠近第二轴体的底端。
8、通过采用上述技术方案,能够对第一线缆中部的不同位置进行良好的限位,提高第一线缆安装与限位的稳定性。
9、可选的,所述二轴臂下部支架呈“l”状。
10、通过采用上述技术方案,一方面,能够提高二轴臂下部支架与第二轴体的接触面积,从而提高二轴臂下部支架安装的稳定性,进而便于二轴臂下部支架对第一线缆进行稳定的固定与限位;另一方面,便于二轴臂下部支架和二轴臂下部支架上安装卡箍的安装。
11、综上所述,本申请包括以下至少一种有益技术效果:
12、1.通过安装通孔的设置,省去了原本需要设置于机器人上用于限位第二线缆中部的支架,从而节省了第三轴体至第六轴体这段的空间,减少了与其他部件的干涉,且结构简单紧凑,便于现场安装和后期的维护保养;
13、2.二轴臂下部支架的设置能够提高二轴臂下部支架与第二轴体的接触面积,从而提高二轴臂下部支架安装的稳定性,进而便于二轴臂下部支架对第一线缆进行稳定的固定与限位;另一方面,便于二轴臂下部支架和二轴臂下部支架上安装卡箍的安装。
技术特征:
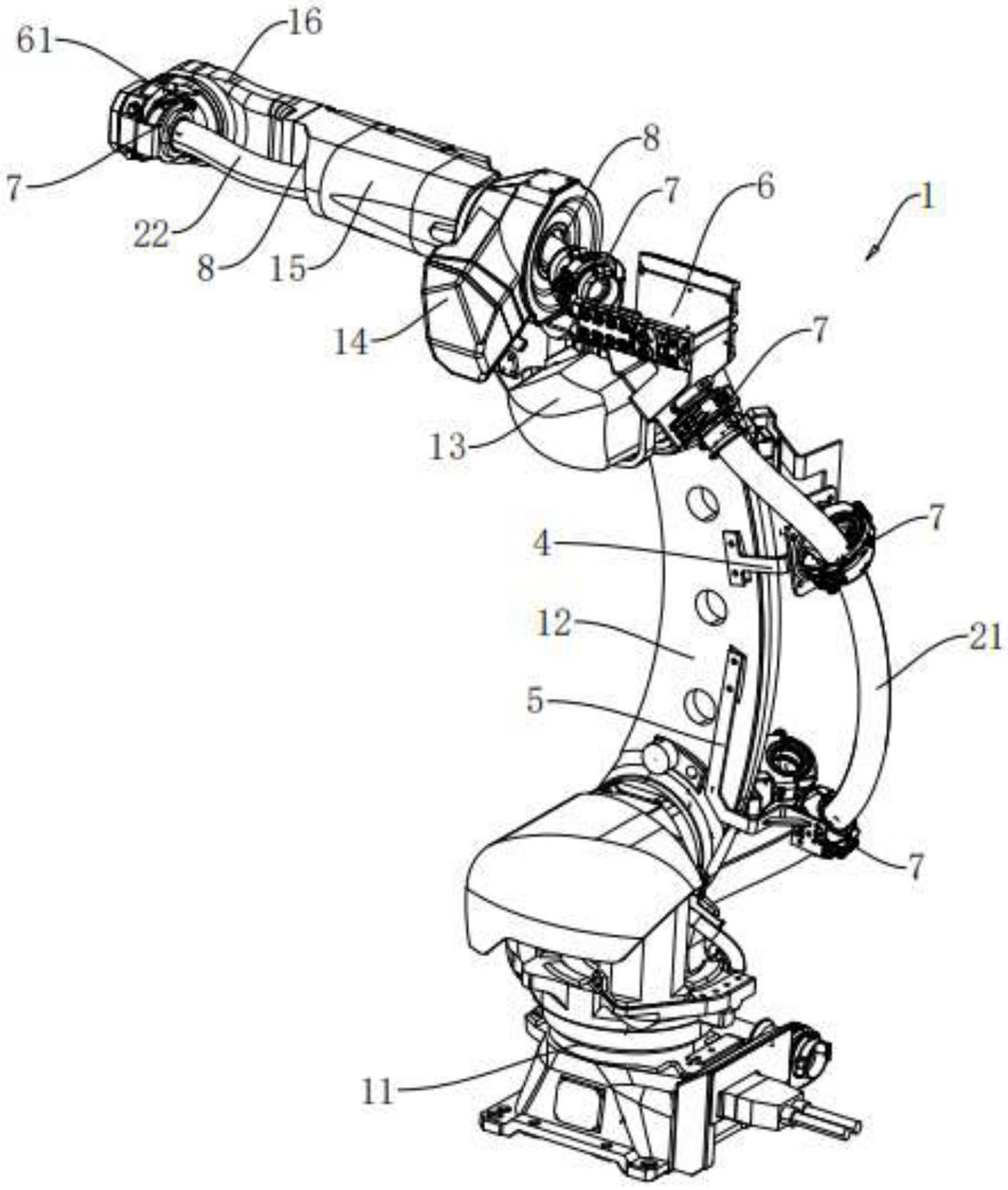
1.一种节省空间型机器人管线包固定套件装置,其特征在于:包括一轴底部支架(3)、二轴臂上部支架(4)、二轴臂下部支架(5)、三轴支架(6)和六轴支架(61),所述一轴底部支架(3)设置于第一轴体(11)上,所述二轴臂上部支架(4)和二轴臂下部支架(5)均设置于第二轴体(12)上,所述三轴支架(6)设置于第三轴体(13)上,所述六轴支架(61)设置于第六轴体(16)上;
2.根据权利要求1所述的一种节省空间型机器人管线包固定套件装置,其特征在于:所述二轴臂上部支架(4)靠近第二轴体(12)的中部,所述二轴臂下部支架(5)靠近第二轴体(12)的底端。
3.根据权利要求2所述的一种节省空间型机器人管线包固定套件装置,其特征在于:所述二轴臂下部支架(5)呈“l”状。
技术总结
本申请涉及机器人管线包固定的技术领域,尤其是涉及一种节省空间型机器人管线包固定套件装置,其包括一轴底部支架、二轴臂上部支架、二轴臂下部支架、三轴支架和六轴支架;一轴底部支架、二轴臂上部支架、二轴臂下部支架、三轴支架和六轴支架上均设置有安装卡箍,第一线缆的两端通过安装卡箍分别设置于一轴底部支架和三轴支架上,第一线缆的中部通过安装卡箍设置于二轴臂上部支架和二轴臂下部支架上;第二线缆的两端通过安装卡箍分别设置于第三轴体和第六轴体上;第四轴体和第五轴体上开设有安装通孔,第二线缆的中部穿过安装通孔并由安装通孔限位。本申请具有节省管线包固定时所占据的空间,减少对其他部件造成的干扰的效果。
技术研发人员:殷超,刘德华
受保护的技术使用者:贸联特种电缆(常州)有限公司
技术研发日:20230110
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!