一种机械手臂的制作方法
本技术涉及机械手臂,具体为一种机械手臂。
背景技术:
1、机械手臂是一种能按既定的程序或要求,自动完成物件传送或操作作业的机械装置,它能部分地代替人的手工劳动,给工件的加工带来很大的帮助。
2、经海量检索,发现现有技术中的机械手臂典型的如公开号cn208663800u,一种机械手臂。所述机械手臂,包括手臂本体、基座和支撑结构;所述手臂本体用于承载晶圆,所述基座与所述手臂本体的端部连接;所述支撑结构包括相对的第一末端和第二末端,所述第一末端与所述基座倾斜连接,所述第二末端与所述手臂本体的中部连接。
3、综上所述,现有的机械手臂一般利用支撑结构来提高机械手臂的稳定性,但是由于机械手臂具有伸缩结构,伸缩部分在移动的过程中难以得到支撑处理,这样会影响整体的稳定性,针对上述问题,需要对现有的设备进行改进。
技术实现思路
1、本实用新型的目的在于提供一种机械手臂,以解决上述背景技术中提出的现有的机械手臂一般利用支撑结构来提高机械手臂的稳定性,但是由于机械手臂具有伸缩结构,伸缩部分在移动的过程中难以得到支撑处理,这样会影响整体的稳定性的问题。
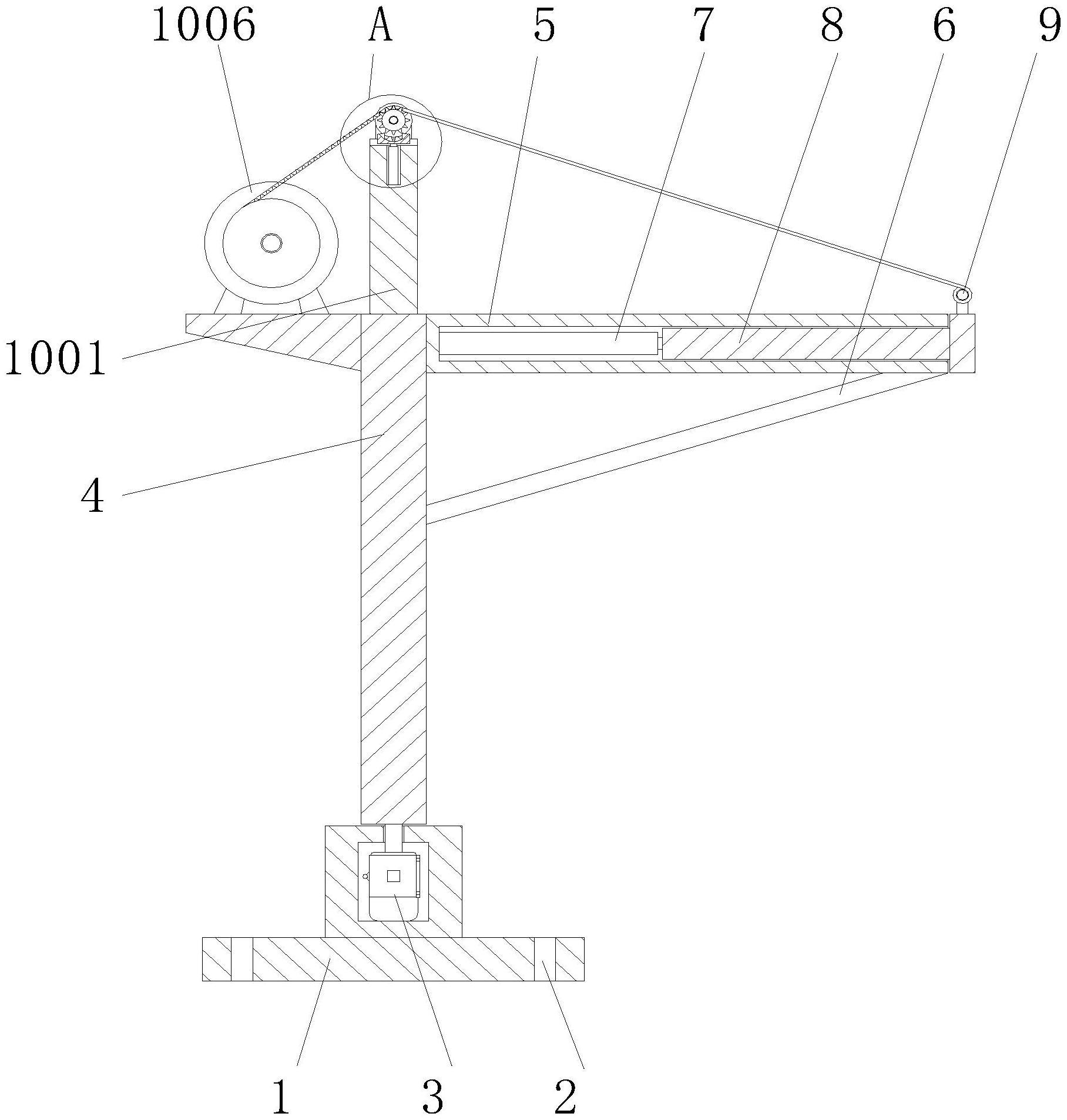
2、本实用新型提供的一种机械手臂,包括底座和稳定机构,所述底座的底部开设有安装孔,所述底座的顶部转动连接有支架,所述支架的一侧固定有第一机械臂和托架,所述第一机械臂固定在托架的顶部,所述第一机械臂的内壁上固定有电动伸缩杆,所述电动伸缩杆的一端固定有第二机械臂,所述第二机械臂的顶部固定有连接杆。
3、所述稳定机构固定在支架的顶部,所述稳定机构的末端套放在连接杆的外侧。
4、优选的,所述底座内固定有马达,且马达的顶部与支架相连接。
5、优选的,所述第二机械臂通过电动伸缩杆与第一机械臂构成伸缩结构。
6、优选的,所述稳定机构包括固定架、电动伸缩柱、齿板、滚筒、齿条、电动收卷机、连接带和通孔,且固定架固定在支架的顶部,所述固定架的上侧通过电动伸缩柱与齿板相连接。
7、优选的,所述固定架的顶部转动连接有滚筒,且滚筒与齿板上下对应设置,所述滚筒的外侧固定有齿条,且齿条周向均匀分布在滚筒上。
8、优选的,所述支架的顶部固定有电动收卷机,且电动收卷机的外侧绕放有连接带,所述连接带的末端套放在连接杆的外侧。
9、优选的,所述连接带上开设有通孔,且通孔等间距分布在连接带上,所述齿条卡合连接在通孔内。
10、本实用新型的技术手段可获得的技术效果为:
11、1、该机械手臂,能够达到调节方向和加强稳定的目的,支架可360度旋转,方便调节第一机械臂和第二机械臂的方向,托架对第一机械臂起到支撑的作用,方便提高第一机械臂的稳定性,第二机械臂可在电动伸缩杆的作用下移动,方便灵活伸缩第二机械臂,在此过程中可利用电动收卷机来收放连接带,连接带对第二机械臂起到牵引拉拽的作用,使第二机械臂移动起来更加稳定。
12、2、该机械手臂,能够达到锁定的目的,在收放连接带的过程中,滚筒转动,调整好第二机械臂的位置之后,齿板向上移动并与对应的齿条啮合连接在一起,方便达到锁定的效果。
技术特征:
1.一种机械手臂,包括底座(1)和稳定机构(10),其特征在于:所述底座(1)的底部开设有安装孔(2),所述底座(1)的顶部转动连接有支架(4),所述支架(4)的一侧固定有第一机械臂(5)和托架(6),所述第一机械臂(5)固定在托架(6)的顶部,所述第一机械臂(5)的内壁上固定有电动伸缩杆(7),所述电动伸缩杆(7)的一端固定有第二机械臂(8),所述第二机械臂(8)的顶部固定有连接杆(9);
2.如权利要求1所述的一种机械手臂,其特征在于:所述底座(1)内固定有马达(3),且马达(3)的顶部与支架(4)相连接。
3.如权利要求1所述的一种机械手臂,其特征在于:所述第二机械臂(8)通过电动伸缩杆(7)与第一机械臂(5)构成伸缩结构。
4.如权利要求1所述的一种机械手臂,其特征在于:所述稳定机构(10)包括固定架(1001)、电动伸缩柱(1002)、齿板(1003)、滚筒(1004)、齿条(1005)、电动收卷机(1006)、连接带(1007)和通孔(1008),且固定架(1001)固定在支架(4)的顶部,所述固定架(1001)的上侧通过电动伸缩柱(1002)与齿板(1003)相连接。
5.如权利要求4所述的一种机械手臂,其特征在于:所述固定架(1001)的顶部转动连接有滚筒(1004),且滚筒(1004)与齿板(1003)上下对应设置,所述滚筒(1004)的外侧固定有齿条(1005),且齿条(1005)周向均匀分布在滚筒(1004)上。
6.如权利要求4所述的一种机械手臂,其特征在于:所述支架(4)的顶部固定有电动收卷机(1006),且电动收卷机(1006)的外侧绕放有连接带(1007),所述连接带(1007)的末端套放在连接杆(9)的外侧。
7.如权利要求4所述的一种机械手臂,其特征在于:所述连接带(1007)
技术总结
本技术涉及一种机械手臂,包括底座和稳定机构,所述支架的一侧固定有第一机械臂和托架,所述第一机械臂固定在托架的顶部,所述第一机械臂的内壁上固定有电动伸缩杆,所述电动伸缩杆的一端固定有第二机械臂,所述第二机械臂的顶部固定有连接杆,所述稳定机构固定在支架的顶部,所述稳定机构的末端套放在连接杆的外侧。该机械手臂,支架可360度旋转,方便调节第一机械臂和第二机械臂的方向,托架对第一机械臂起到支撑的作用,方便提高第一机械臂的稳定性,第二机械臂可在电动伸缩杆的作用下移动,方便灵活伸缩第二机械臂,在此过程中可利用电动收卷机来收放连接带,连接带对第二机械臂起到牵引拉拽的作用,使第二机械臂移动起来更加稳定。
技术研发人员:陈成锋
受保护的技术使用者:上海手拓科技有限公司
技术研发日:20230110
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!