一种混联三自由度冗余并联机器人
本技术涉及机械工程,特别是涉及一种混联三自由度冗余并联机器人。
背景技术:
1、由于串联机器人存在工作负载小,精度差的缺点,并联机器人在结构刚度,负载能力,运动精度等方面优于传统串联机构,因此,在很多领域,会使用到并联机器人取代串联机器人,但并联机器人的并联机构的几何特性有很大欠缺,如工作空间小以及工作空间内存在奇异位形等,一些关节运动到相应位置,会使机构无法满足工作要求。
技术实现思路
1、本实用新型的目的是针对现有技术中存在的技术缺陷,而提供一种混联三自由度冗余并联机器人,其冗余并联机构能够消除奇异位形、避开障碍、克服关节运动限制和改善动态特性等。
2、为实现本实用新型的目的所采用的技术方案是:
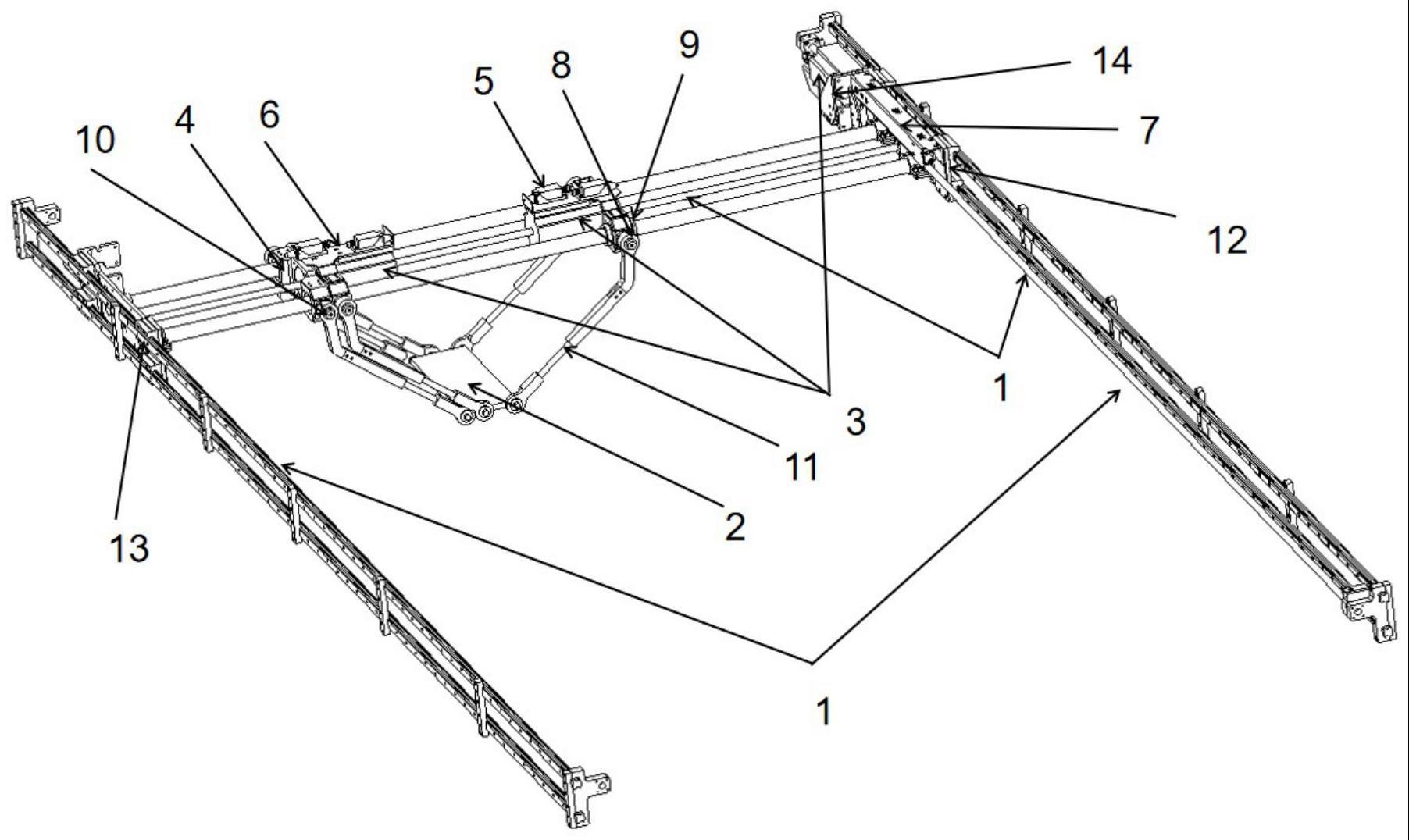
3、一种混联三自由度冗余并联机器人,包括定平台、动平台、三个贯穿式电机以及与所述动平台连接而用于移动所述动平台升降及水平移动的六根机械臂,所述定平台包括两个沿宽度方向隔开布置的导轨,垂直布置于两根导轨之间且沿径向方向隔开平行布置的第一光轴、第二光轴,平行布置于第一光轴、第二光轴之间的第一丝杆,两个相互隔开的电机固定座通过轴套套装在第一光轴、第二光轴上,每个电机固定座上安装一个贯穿式电机,两个所述贯穿式电机均穿过第一丝杆与所述第一丝杆连接;一根所述导轨的一侧平行布置第二丝杆,所述第二丝杆与一个安装于电机支架上的贯穿式电机连接;所述第一光轴第二光轴以及第一丝杆的两端分别固定在两侧的滑块固定座上,所述电机支架安装在对应的滑块固定座一侧,所述滑块固定座上的滑块与两侧的导轨配合;
4、所述机械臂中位于一侧的四根机械臂的一端各自与一个所述电机固定座连接,位于相对的另一侧的另外两根机械臂的一端各自与另一个电机固定座连接,六根所述机械臂的另一端与所述动平台的相对侧端的两个外侧连接。
5、其中,配置有限位开关,用于对每个贯穿式电机的移动直线行程进行限位控制。
6、其中,所述限位开关包括第一限位开关、第二限位开关、第三限位开关、第四限位开关,所述第一限位开关、第二限位开关安装于第一限位开关支架上,所述第三限位开关、第四限位开关安装于第二限位开关支架上;所述第一限位开关支架与第二限位开关支架各自安装于固定在所述电机固定座上的贯穿式电机上。
7、其中,所述限位开关还包括有第五限位开关、第六限位开关,第五限位开关安装在一个导轨的一侧的电机支架上,第六限位开关安装在接线端子支架的一端,所述接线端子支架安装在对应侧的滑块固定座上。
8、其中,所述导轨安装于导轨固定支架,从而实现将所述定平台通过导轨固定支架固定在不同应用场合的设备上。
9、其中,所述第二丝杆穿过安装于电机支架上的贯穿式电机并固定在定平台一侧的导轨两端的导轨固定支架上。
10、其中,所述电机固定座和机械臂上下摆臂均采用轻质铝合金材料制成。
11、其中,所述机械臂装有电动缸,通过所述电动缸与所述动平台连接,实现驱动所述动平台的动作。
12、其中,所述机械臂的两端布置连接用的安装孔,在机械臂两端的安装孔内布置有轴承,所述机械臂两端的轴承通过与内六角螺栓的配合分别与对应的电机固定座和动平台相连接。
13、本实用新型的混联三自由度冗余并联机器人,具有如下有益效果:
14、1.通过机械臂形成四连杆结构的并联结构,左侧两个机械臂和两个光轴、动平台构成平行四边形机构,能保证动平台始终与光轴保持平行,通过改变光轴上两个贯穿式电机之间的距离和机械臂的长度,能改变其上下抓取探测深度,具有结构稳定且负载大优点。
15、2.通过贯穿式电机直接驱动左右机械臂来控制动平台移动,减去了不必要的从动臂,既提高其承载能力又提高运动精度。
16、3.采用冗余机构,能通过改变左右机械臂的相对长度差,使动平台到达定平台两侧边缘位置,当机械臂伸长时可使动平台到达更深位置。因为位置反解不唯一,末端执行机构不会太受限于空间障碍物和电机移动位移限制而无法到达指定区域,具有在恶劣的环境下工作且工作面积更大的优点。
技术特征:
1.混联三自由度冗余并联机器人,其特征在于,包括定平台、动平台、三个贯穿式电机以及与所述动平台连接而用于移动所述动平台升降及水平移动的六根机械臂,所述定平台包括两个沿宽度方向隔开布置的导轨,垂直布置于两根导轨之间且沿径向方向隔开平行布置的第一光轴、第二光轴,平行布置于第一光轴、第二光轴之间的第一丝杆,两个相互隔开的电机固定座通过轴套套装在第一光轴、第二光轴上,每个电机固定座上安装一个贯穿式电机,两个所述贯穿式电机均穿过第一丝杆与所述第一丝杆连接;一根所述导轨的一侧平行布置第二丝杆,所述第二丝杆与一个安装于电机支架上的贯穿式电机连接;所述第一光轴第二光轴以及第一丝杆的两端分别固定在两侧的滑块固定座上,所述电机支架安装在对应的滑块固定座一侧,所述滑块固定座上的滑块与两侧的导轨配合;
2.根据权利要求1所述混联三自由度冗余并联机器人,其特征在于,配置有限位开关,用于对每个贯穿式电机的移动直线行程进行限位控制。
3.根据权利要求2所述混联三自由度冗余并联机器人,其特征在于,所述限位开关包括第一限位开关、第二限位开关、第三限位开关、第四限位开关,所述第一限位开关、第二限位开关安装于第一限位开关支架上,所述第三限位开关、第四限位开关安装于第二限位开关支架上;所述第一限位开关支架与第二限位开关支架各自安装于固定在所述电机固定座上的贯穿式电机上。
4.根据权利要求3所述混联三自由度冗余并联机器人,其特征在于,所述限位开关还包括有第五限位开关、第六限位开关,第五限位开关安装在一个导轨的一侧的电机支架上,第六限位开关安装在接线端子支架的一端,所述接线端子支架安装在对应侧的滑块固定座上。
5.根据权利要求1所述混联三自由度冗余并联机器人,其特征在于,所述导轨安装于导轨固定支架,从而实现将所述定平台通过导轨固定支架固定在不同应用场合的设备上。
6.根据权利要求5所述混联三自由度冗余并联机器人,其特征在于,所述第二丝杆穿过安装于电机支架上的贯穿式电机并固定在定平台一侧的导轨两端的导轨固定支架上。
7.根据权利要求1所述混联三自由度冗余并联机器人,其特征在于,所述电机固定座和机械臂上下摆臂均采用轻质铝合金材料制成。
8.根据权利要求1所述混联三自由度冗余并联机器人,其特征在于,所述机械臂装有电动缸,通过所述电动缸与所述动平台连接,实现驱动所述动平台的动作。
9.根据权利要求1所述混联三自由度冗余并联机器人,其特征在于,所述机械臂的两端布置连接用的安装孔,在机械臂两端的安装孔内布置有轴承,所述机械臂两端的轴承通过与内六角螺栓的配合分别与对应的电机固定座和动平台相连接。
技术总结
本技术公开一种混联三自由度冗余并联机器人,包括定平台、动平台、贯穿式电机、与动平台连接的机械臂,定平台包括两个隔开平行布置的导轨,垂直布置于两根导轨间且沿隔开平行布置的两个光轴,平行布置于两光轴间的第一丝杆,两个电机固定座套装在两光轴上,每个电机固定座上安装一贯穿式电机,两个贯穿式电机穿过第一丝杆杠;一根导轨一侧平行布置第二丝杆,第二丝杆与安装于电机支架上的一贯穿式电机连接;两个光轴及第一丝杆的两端分别固定在两侧的滑块固定座上,电机支架安装在滑块固定座一侧,滑块固定座上的滑块与两侧的导轨配合。本技术能够消除奇异位形、避开障碍、克服关节运动限制和改善动态特性等。
技术研发人员:高建树,周志明,丁情信,曹静
受保护的技术使用者:中国民航大学
技术研发日:20230113
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!