一种机械臂爪的制作方法
本技术涉及生产sma半导体的设备的,尤其是涉及一种机械臂爪。
背景技术:
1、sma半导体在生产制造过程中,会使用金属铜基引线框架一次塑封成型若干个sma半导体,然后利用机械臂的机械臂爪转移至后续的裁剪等工位。
2、目前的机械臂爪在转移金属铜基引线框架的过程中,将两个能够相互靠近或远离的卡板插入金属铜基引线框架边缘处具有的连接孔中,以通过卡板将金属铜基引线框架拾起,并且能够避免金属铜基引线框架出现弯曲变形的情况。
3、但是,目前的机械臂爪需要使用到2个电机,才能同时驱动分别位于金属铜基引线框架四角处的四组卡板(每两个卡板为一组),以将金属铜基引线框架平稳地拾起,设备投入的成本较高。
技术实现思路
1、针对上述情况,本实用新型提供一种机械臂爪,旨在解决现有机械臂爪需要使用到2个电机,才能同时驱动分别位于金属铜基引线框架四角处的四组卡板(每两个卡板为一组),以将金属铜基引线框架平稳地拾起,设备投入的成本较高的技术问题。
2、为实现上述目的,本实用新型提供如下技术方案:
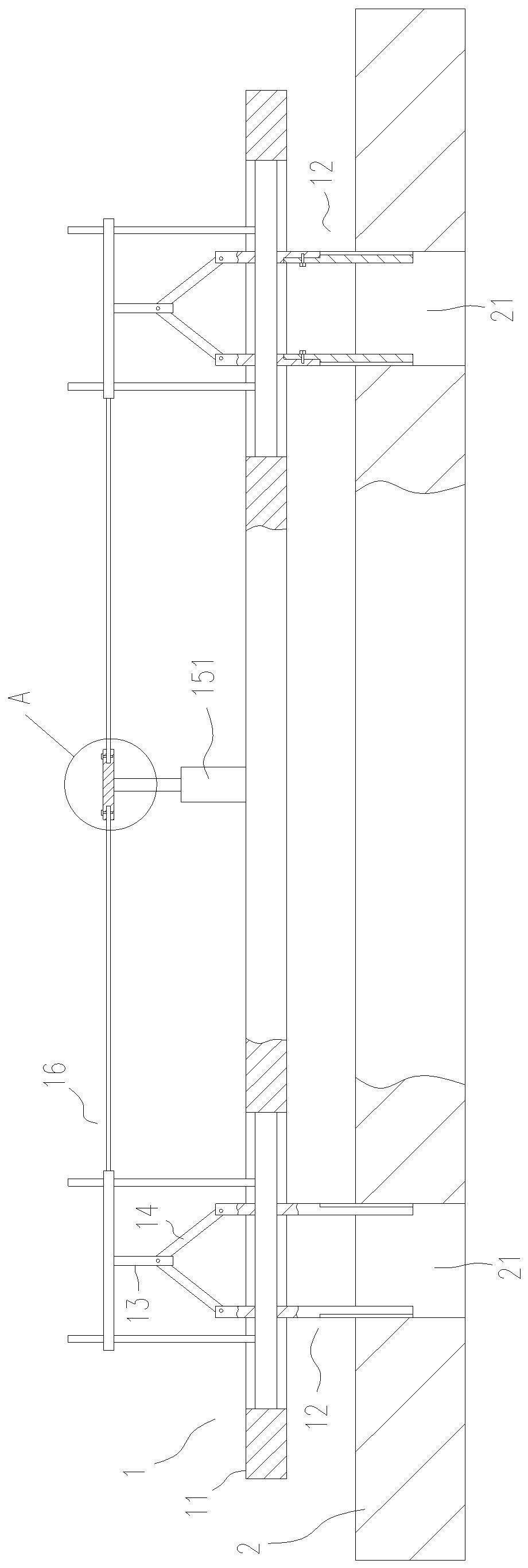
3、本实用新型提供一种机械臂爪,其主要可以包括:
4、支板;
5、若干卡板组,包括两个与支板滑动连接的卡板,卡板组能够插入金属铜基引线框架的连接孔中;
6、升降杆,活动设置在支板的上方;
7、多个传动杆,其一端与升降杆铰接、另一端与卡板铰接;
8、驱动源,安装于支板、用于纵向移动升降杆;及
9、连接机构,用于连接驱动源的输出端和升降杆;
10、其中,在升降杆纵向移动时,卡板组的两个卡板相互靠近或远离。
11、在本实用新型的一些实施例中,支板上开设有避让孔,避让孔内横向地固定有导杆,卡板的上部开设有与导杆匹配的导向孔。
12、在本实用新型的一些实施例中,连接机构包括连接杆,连接杆的一端与驱动源的输出端连接、另一端与升降杆直接或间接地连接。
13、在本实用新型的一些实施例中,连接机构还包括:
14、竖杆,直接或间接地固定于支板;及
15、横板,与竖杆相插接,升降杆固定于横板,连接杆的一端与横板相连。
16、在本实用新型的一些实施例中,连接杆的一端横向地与横板相插接。
17、在本实用新型的一些实施例中,驱动源的输出端固定有连接板,连接杆的一端与连接板通过限位销连接,限位销用于限制连接杆沿横向的移动。
18、在本实用新型的一些实施例中,驱动源包括气缸。
19、在本实用新型的一些实施例中,卡板组有四个。
20、在本实用新型的一些实施例中,卡板的一侧设置有海绵垫。
21、本实用新型实施例至少具有如下优点或有益效果:
22、1.在将卡板组插入金属铜基引线框架的连接孔中后,升降杆下移使卡板组的两个卡板相互远离,此时两个卡板的侧面能够与连接孔的内侧接触,以便于通过卡板组将金属铜基引线框架拾起。
23、2.当有多个卡板组时,升降杆也有多个,只需要配置一个驱动源便能够通过连接机构同步地驱动各个升降杆移动,以减少驱动源的数量、降低设备投入的成本。
24、本实用新型的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得明显,或者通过实施本实用新型而了解。
技术特征:
1.一种机械臂爪,其特征在于,包括:
2.根据权利要求1所述的机械臂爪,其特征在于,所述支板上开设有避让孔,所述避让孔内横向地固定有导杆,所述卡板的上部开设有与所述导杆匹配的导向孔。
3.根据权利要求1所述的机械臂爪,其特征在于,所述连接机构包括连接杆,所述连接杆的一端与所述驱动源的输出端连接、另一端与所述升降杆直接或间接地连接。
4.根据权利要求3所述的机械臂爪,其特征在于,所述连接机构还包括:
5.根据权利要求4所述的机械臂爪,其特征在于,所述连接杆的一端横向地与所述横板相插接。
6.根据权利要求5所述的机械臂爪,其特征在于,所述驱动源的输出端固定有连接板,所述连接杆的一端与所述连接板通过限位销连接,所述限位销用于限制所述连接杆沿横向的移动。
7.根据权利要求1所述的机械臂爪,其特征在于,所述驱动源包括气缸。
8.根据权利要求1所述的机械臂爪,其特征在于,所述卡板组有四个。
9.根据权利要求1所述的机械臂爪,其特征在于,所述卡板的一侧设置有海绵垫。
技术总结
本技术提供了一种机械臂爪,涉及生产SMA半导体的设备的技术领域,其包括支板;若干卡板组,包括两个与支板滑动连接的卡板,卡板组能够插入金属铜基引线框架的连接孔中;升降杆,活动设置在支板的上方;多个传动杆,其一端与升降杆铰接、另一端与卡板铰接;驱动源,安装于支板、用于纵向移动升降杆;连接机构,用于连接驱动源的输出端和升降杆;其中,在升降杆纵向移动时,卡板组的两个卡板相互靠近或远离。当有多个卡板组时,升降杆也有多个,只需要配置一个驱动源便能够通过连接机构同步地驱动各个升降杆移动,以减少驱动源的数量、降低设备投入的成本。
技术研发人员:刘明华,刘俊
受保护的技术使用者:成都尚明工业有限公司
技术研发日:20230111
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!