一种机器人手臂夹具的制作方法
本技术涉及夹具,具体为一种机器人手臂夹具。
背景技术:
1、机器人手臂广泛应用于各类机械加工领域,机器人手臂夹具用于对工件的定位夹持,目前在柱类坯件的热冲压加工过程中普遍使用机器人手臂夹具对工件进行加工过程的上料和下料夹持。
2、根据对比专利cn215037594u公开了一种用于高温作业的机器人手臂夹具,涉及机械加工技术领域,包括安装架、固定架、固定柱、伸缩柱、驱动电机、驱动减速器、安装孔、驱动轴、伸缩滑块、伸缩滑槽、螺杆槽、螺杆、螺纹滑块、密封垫圈、传动箱、进油管口、出油管口、传动机构。本实用新型设计方案通过通油密封式传动箱的设计使机器人手臂夹具的传动部件在运行过程中得到有效的润滑和封闭运行,有效的避免了传动部件的覆尘运行,减少传动部件的磨损,同时可通过传动箱内的循环润滑油将夹持爪部传递的热量带走,起到冷却降温的作用,有利于保护驱动部件,提高其使用寿命。
3、对比专利中的手臂夹具在进行使用时可通过传动箱内的循环润滑油将夹持爪部传递的热量带走,起到冷却降温的作用,而在进行使用时不方便进行手臂的多角度调节操作,使得在进行夹持后的放置时无法进行多场景的适用,从而影响夹具的夹持稳定操作,且夹持时稳定性较低,因此亟需设计一种机器人手臂夹具来解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种机器人手臂夹具,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种机器人手臂夹具,包括:
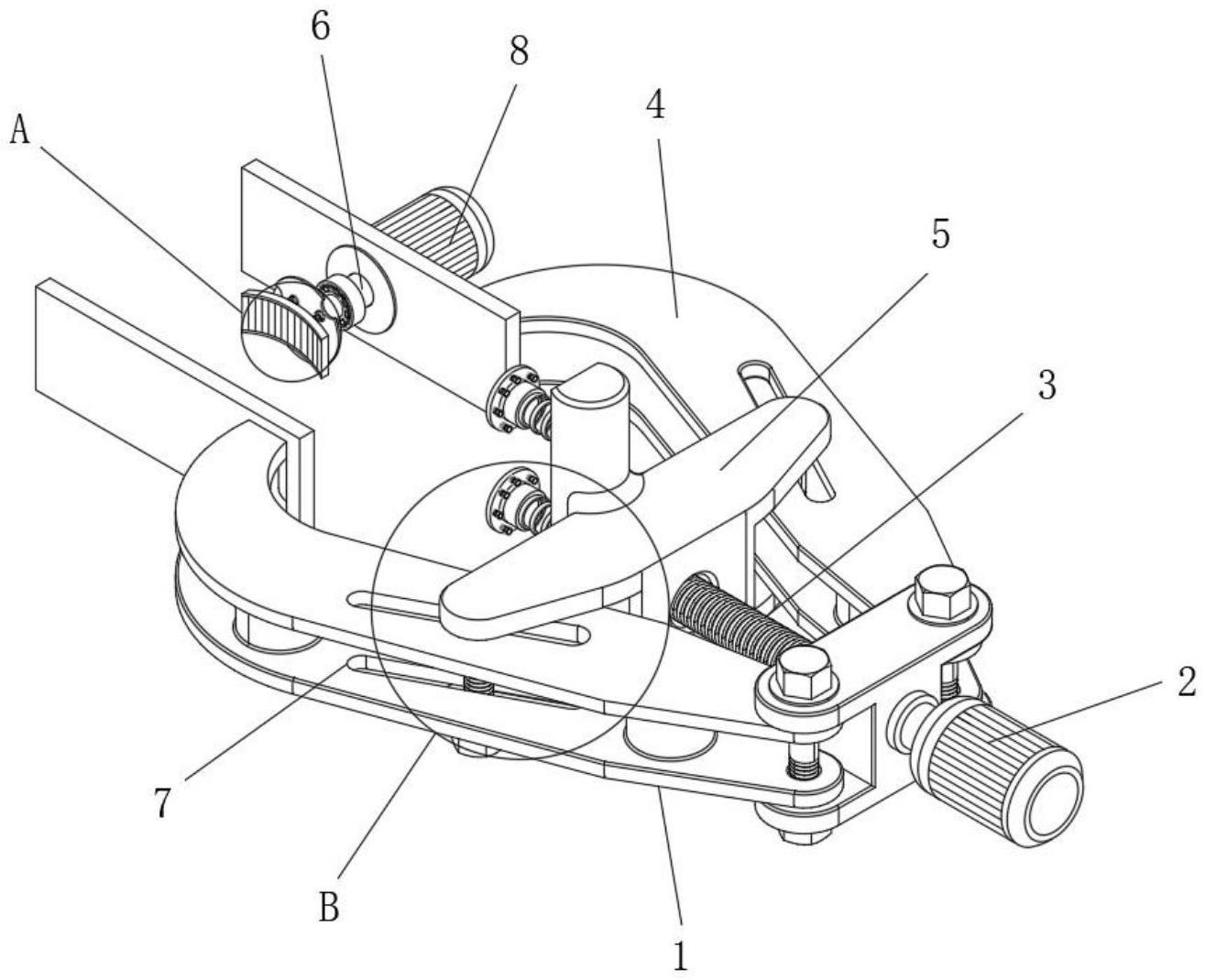
4、架体,所述架体的外部设置有第一电机,所述第一电机的输出端外部固定连接有螺纹杆,所述螺纹杆的外部转动连接有连接座,所述连接座的外部连接有铰接杆,所述铰接杆的外部连接有夹持机构,所述铰接杆的外部安装有活动机构,所述夹持机构的外部设置有转动机构;
5、转动机构,所述转动机构包括第二电机、限位板和转动轴座,所述第二电机设置在夹持机构的外部,所述限位板固定连接在铰接杆的外部,所述限位板的一侧外部固定安装有转动轴座,所述转动轴座的内部插设有固定板。
6、作为本实用新型再进一步的方案:所述固定板在转动轴座的内部转动连接,所述第二电机通过螺丝固定安装在限位板的外侧壁上。
7、作为本实用新型再进一步的方案:所述固定板贯穿插设在转动轴座的内部,所述固定板固定连接在第二电机的输出端外部。
8、作为本实用新型再进一步的方案:所述夹持机构包括安装板、伸缩簧和夹持板,所述安装板固定连接在固定板的外侧壁上,所述安装板的外侧固定连接有伸缩簧,所述伸缩簧的外部固定连接有夹持板。
9、作为本实用新型再进一步的方案:所述夹持板的外表面为弧形钢板,所述夹持板与伸缩簧弹性伸缩连接。
10、作为本实用新型再进一步的方案:所述活动机构包括滑动槽、滑动杆和连接板座,所述滑动槽开设在铰接杆的顶端外部,所述滑动槽的内部插设有滑动杆,所述滑动杆转动连接在连接座的底端外部,所述连接座的外侧壁上固定连接有连接板座,所述连接板座的外部固定连接有抵合簧。
11、作为本实用新型再进一步的方案:所述抵合簧焊接在连接板座的外部,所述滑动杆在滑动槽的内部滑动连接,所述滑动杆在连接座的底端转动连接。
12、与现有技术相比,本实用新型的有益效果是:
13、1、通过设置的第二电机、限位板、转动轴座和固定板使得当在进行机械臂的夹持操作后,通过第二电机的工作,带动固定板在转动轴座的内部进行转动操作,从而使得固定板上的夹持机构在对机械臂进行夹持后能够进行多角度的转动调节操作,从而当机械臂在进行调运时能够在角度的调节后进行放置操作,进而大大增加对机械臂进行运转时的便捷性。
14、2、通过设置的安装板、伸缩簧、夹持板和转动机构使得当在进行机器人机械臂的夹持操作时,通过夹持板与伸缩簧的弹性伸缩,能够使得夹持板在进行机械臂的夹持时能够进行弹性防护,且通过设置的弧形钢板夹持板能够增加在进行夹持时的稳定性,进而使得在进行机械臂进行夹持运输时能够有效增加其稳定性。
技术特征:
1.一种机器人手臂夹具,其特征在于,包括:
2.根据权利要求1所述的一种机器人手臂夹具,其特征在于:所述固定板(804)在转动轴座(803)的内部转动连接,所述第二电机(801)通过螺丝固定安装在限位板(802)的外侧壁上。
3.根据权利要求1所述的一种机器人手臂夹具,其特征在于:所述固定板(804)贯穿插设在转动轴座(803)的内部,所述固定板(804)固定连接在第二电机(801)的输出端外部。
4.根据权利要求1所述的一种机器人手臂夹具,其特征在于:所述夹持机构(6)包括安装板(601)、伸缩簧(602)和夹持板(603),所述安装板(601)固定连接在固定板(804)的外侧壁上,所述安装板(601)的外侧固定连接有伸缩簧(602),所述伸缩簧(602)的外部固定连接有夹持板(603)。
5.根据权利要求4所述的一种机器人手臂夹具,其特征在于:所述夹持板(603)的外表面为弧形钢板,所述夹持板(603)与伸缩簧(602)弹性伸缩连接。
6.根据权利要求1所述的一种机器人手臂夹具,其特征在于:所述活动机构(7)包括滑动槽(701)、滑动杆(702)和连接板座(703),所述滑动槽(701)开设在铰接杆(4)的顶端外部,所述滑动槽(701)的内部插设有滑动杆(702),所述滑动杆(702)转动连接在连接座(5)的底端外部,所述连接座(5)的外侧壁上固定连接有连接板座(703),所述连接板座(703)的外部固定连接有抵合簧(704)。
7.根据权利要求6所述的一种机器人手臂夹具,其特征在于:所述抵合簧(704)焊接在连接板座(703)的外部,所述滑动杆(702)在滑动槽(701)的内部滑动连接,所述滑动杆(702)在连接座(5)的底端转动连接。
技术总结
本技术涉及夹具技术领域,具体为一种机器人手臂夹具,包括:架体,所述架体的外部设置有第一电机,所述第一电机的输出端外部固定连接有螺纹杆,所述螺纹杆的外部转动连接有连接座,所述连接座的外部连接有铰接杆,所述铰接杆的外部连接有夹持机构,所述铰接杆的外部安装有活动机构。本技术通过设置的第二电机、转动轴座和固定板使得当在进行机械臂的夹持操作后,通过第二电机的工作,带动固定板在转动轴座的内部进行转动操作,从而使得固定板上的夹持机构在对机械臂进行夹持后能够进行多角度的转动调节操作,从而当机械臂在进行调运时能够在角度的调节后进行放置操作,进而大大增加对机械臂进行运转时的便捷性。
技术研发人员:叶明华
受保护的技术使用者:上海行芝达智能装备技术有限公司
技术研发日:20230130
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!