轨道机器人防护模块的制作方法
本技术涉及轨道机器人,具体为轨道机器人防护模块。
背景技术:
1、随着智能电厂的发展,针对磨煤机巡检作业,电厂通常会使用到巡检机器人进行电厂环境巡检,巡检机器人大多搭载红外热像仪、可见光高清摄像机、温湿度传感器、声音传感器、声光报警器等,系统采用高性能嵌入式控制,应用于目标区域的目标设备巡检。
2、但现有的巡检机器人在具体使用时,仍存在一些问题:现有的巡检机器人大多为四轮行走式机器人,机器人巡检作业时,会在电厂地面上行走巡检,由于电厂地面环境比较复杂,很容易造成机器人移动时倾倒或受到磕碰,造成巡检机器人损坏,从而影响后续机器人的巡检作业,为此,我们提出轨道机器人防护模块用于解决上述问题。
技术实现思路
1、本实用新型的目的在于提供轨道机器人防护模块,以解决上述背景技术中提出的问题。
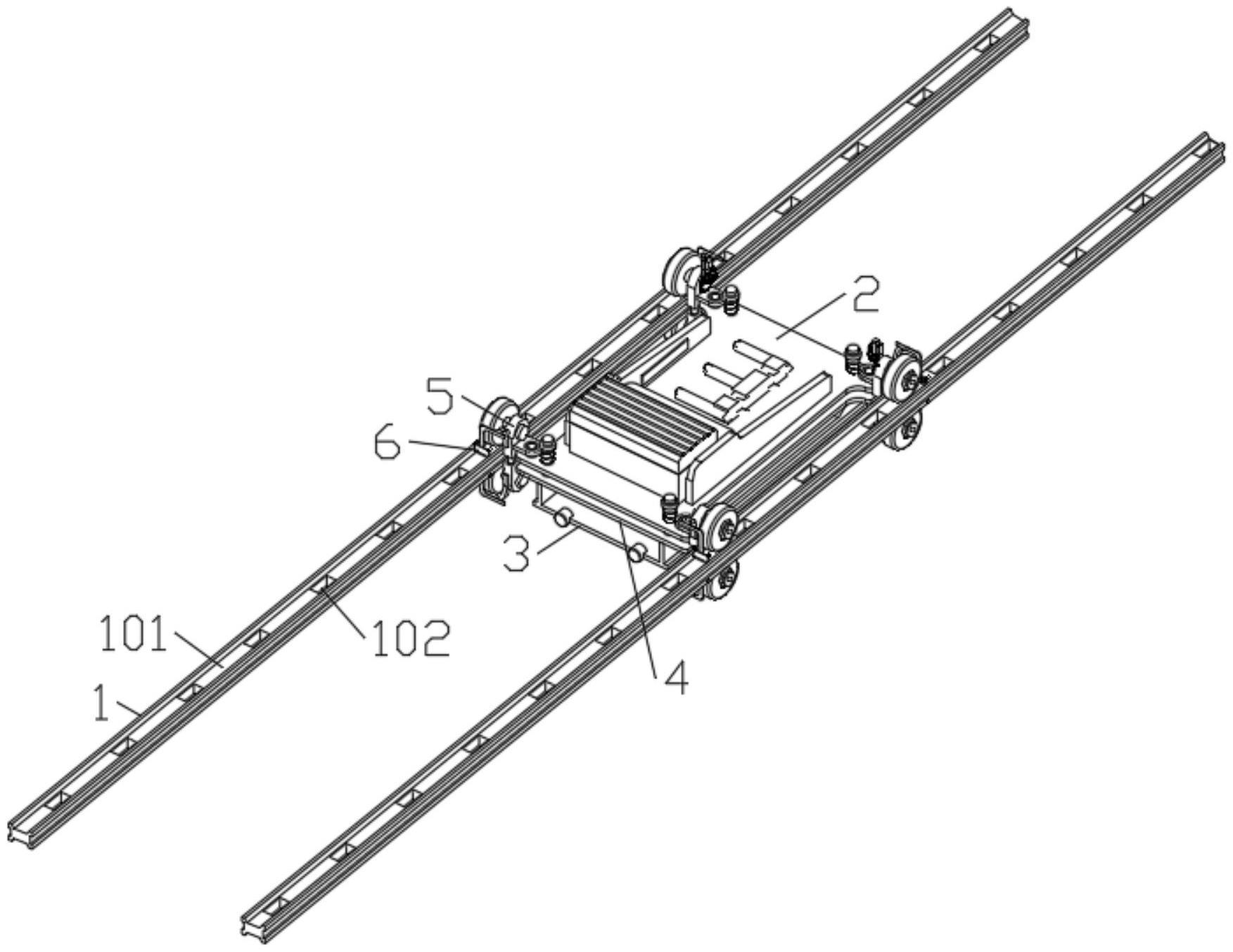
2、为实现上述目的,本实用新型提供如下技术方案:轨道机器人防护模块,包括悬吊平行轨和顶架,所述顶架的底端设有底架,所述顶架、底架之间设有悬挂组件,所述顶架的顶端四角处均固定安装有转动轴,所述转动轴的顶部均通过轴承转动安装有转动架,所述转动架的端部均固定安装有和悬吊平行轨配合使用的定行机构,所述定行机构的侧端均固定安装有防护组件;
3、所述定行机构包括定行顶框和定行底框,所述定行顶框和定行底框呈上下对称分布结构,所述定行顶框固定安装在对应转动架的端部,所述定行顶框和定行底框的相背端均转动安装有行动轴,所述行动轴的端部均同轴固定安装有定行轮,所述定行顶框和定行底框的相对侧均固定卡设有限位环,竖直对应两个所述限位环之间活动插设有紧轴,所述紧轴的两端部分别延伸至定行顶框和定行底框中,所述紧轴的两端部均固定安装有限位盘,所述限位盘滑动卡接在对应定行顶框和定行底框中,所述限位盘和对应限位环之间的紧轴外侧套设有紧固弹簧;所述悬吊平行轨的上表面和下表面均开设有和定行轮配合使用的定行槽,所述定行轮活动卡接在对应定行槽中。
4、优选地,位于所述轨道机器人前端的两个定行顶框顶端均固定安装有电机架,所述电机架上固定安装有驱动电机,所述驱动电机的驱动端固定安装有驱动齿轮,所述驱动齿轮的底部均啮合连接有冠齿轮,所述冠齿轮分别固定套接在对应定行顶框上行动轴的外侧。
5、优选地,所述底架的四角处均固定安装有避障雷达;所述底架的底端固定安装有红外摄像仪;所述底架的底端固定安装有温湿度传感器、声光报警器、声音传感器;所述顶架的顶端一侧固定安装有无线充电模块,所述顶架的顶端固定安装有对称分布的两个散热件。
6、优选地,所述悬挂组件包括悬挂底盘,所述底架固定安装在悬挂底盘的底端,所述悬挂底盘的顶端四角处均固定安装有悬挂纵轴,所述顶架上开设有和悬挂纵轴配合使用的悬挂穿槽,所述悬挂纵轴滑动插接在对应悬挂穿槽中,所述悬挂纵轴的顶部穿过顶架的顶端并螺纹安装有限位螺母,所述限位螺母底端和顶架顶端之间的悬挂纵轴外侧设有悬挂弹簧。
7、优选地,所述防护组件包括安装架,所述安装架设有和定行顶框和定行底框对应的两个,两个所述安装架上下对称分布,所述安装架分别固定安装在定行顶框和定行底框的侧端,所述安装架的端部均固定安装有清洁刮板,所述清洁刮板活动卡接在对应定行槽中,所述清洁刮板和对应定行槽内壁接触。
8、优选地,所述定行槽中开设有均匀分布的多个排废穿槽。
9、与现有技术相比,本实用新型的有益效果在于:
10、1.通过设置定行机构,实现整个轨道机器人的悬挂移动,相比传统地面行走,减少磕碰损坏,并提升整个轨道机器人悬挂移动时的稳定性;
11、2.通过设置防护组件,轨道机器人在悬吊平行轨上悬挂移动时,同步带动安装架、清洁刮板移动,清洁刮板在对应的定行槽中滑动,对定行槽中附着的杂灰进行刮板清理,清理的杂灰通过排废穿槽排离定行槽,从而不影响后续定行轮在定行槽中正常滚动,并进一步防止定行轮移动时脱离悬吊平行轨,对整个机器人进行防护,提升安全性。
技术特征:
1.轨道机器人防护模块,包括悬吊平行轨(1)和顶架(2),其特征在于:所述顶架(2)的底端设有底架(3),所述顶架(2)、底架(3)之间设有悬挂组件(4),所述顶架(2)的顶端四角处均固定安装有转动轴(21),所述转动轴(21)的顶部均通过轴承转动安装有转动架(22),所述转动架(22)的端部均固定安装有和悬吊平行轨(1)配合使用的定行机构(5),所述定行机构(5)的侧端均固定安装有防护组件(6);
2.根据权利要求1所述的轨道机器人防护模块,其特征在于:所述悬吊平行轨(1)的上表面和下表面均开设有和定行轮(54)配合使用的定行槽(101),所述定行轮(54)活动卡接在对应定行槽(101)中。
3.根据权利要求1所述的轨道机器人防护模块,其特征在于:位于所述轨道机器人前端的两个定行顶框(51)顶端均固定安装有电机架(7),所述电机架(7)上固定安装有驱动电机(71),所述驱动电机(71)的驱动端固定安装有驱动齿轮(72),所述驱动齿轮(72)的底部均啮合连接有冠齿轮(721),所述冠齿轮(721)分别固定套接在对应定行顶框(51)上行动轴(53)的外侧。
4.根据权利要求1所述的轨道机器人防护模块,其特征在于:所述底架(3)的四角处均固定安装有避障雷达8()。
5.根据权利要求1所述的轨道机器人防护模块,其特征在于:所述底架(3)的底端固定安装有红外摄像仪(9)。
6.根据权利要求1所述的轨道机器人防护模块,其特征在于:所述底架(3)的底端固定安装有温湿度传感器(10)、声光报警器(11)、声音传感器(12)。
7.根据权利要求1所述的轨道机器人防护模块,其特征在于:所述顶架(2)的顶端一侧固定安装有无线充电模块(13),所述顶架(2)的顶端固定安装有对称分布的两个散热件(14)。
8.根据权利要求1所述的轨道机器人防护模块,其特征在于:所述悬挂组件(4)包括悬挂底盘(41),所述底架(3)固定安装在悬挂底盘(41)的底端,所述悬挂底盘(41)的顶端四角处均固定安装有悬挂纵轴(42),所述顶架(2)上开设有和悬挂纵轴(42)配合使用的悬挂穿槽(201),所述悬挂纵轴(42)滑动插接在对应悬挂穿槽(201)中,所述悬挂纵轴(42)的顶部穿过顶架(2)的顶端并螺纹安装有限位螺母(43),所述限位螺母(43)底端和顶架(2)顶端之间的悬挂纵轴(42)外侧设有悬挂弹簧(44)。
9.根据权利要求1所述的轨道机器人防护模块,其特征在于:所述防护组件(6)包括安装架(61),所述安装架(61)设有和定行顶框(51)和定行底框(52)对应的两个,两个所述安装架(61)上下对称分布,所述安装架(61)分别固定安装在定行顶框(51)和定行底框(52)的侧端,所述安装架(61)的端部均固定安装有清洁刮板(62),所述清洁刮板(62)活动卡接在对应定行槽(101)中,所述清洁刮板(62)和对应定行槽(101)内壁接触。
10.根据权利要求9所述的轨道机器人防护模块,其特征在于:所述定行槽(101)中开设有均匀分布的多个排废穿槽(102)。
技术总结
本技术公开了轨道机器人防护模块,具体涉及轨道机器人技术领域,包括悬吊平行轨和顶架,所述顶架的底端设有底架,所述顶架、底架之间设有悬挂组件,所述顶架的顶端四角处均固定安装有转动轴,所述转动轴的顶部均通过轴承转动安装有转动架,所述转动架的端部均固定安装有和悬吊平行轨配合使用的定行机构,所述定行机构的侧端均固定安装有防护组件;所述定行机构包括定行顶框和定行底框,所述定行顶框和定行底框呈上下对称分布结构,所述定行顶框固定安装在对应转动架的端部,本技术,通过设置定行机构,实现整个轨道机器人的悬挂移动,相比传统地面行走,减少磕碰损坏,并提升整个轨道机器人悬挂移动时的稳定性。
技术研发人员:黄兆玺,王少聪,邓毅坤,陈景东
受保护的技术使用者:国能(泉州)热电有限公司
技术研发日:20230209
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!