一种滚动定位结构及机器人的制作方法
本技术涉及自动化设备,具体而言,涉及一种滚动定位结构及机器人。
背景技术:
1、随着自动化设备的广泛使用,通过机械自动化设备,如工业自动化机器人,进行工业生产,实现高精度和自动化的生产模式也逐渐成为主流生产模式。
2、在实际工作中,通常需要根据不同的工序,替换不同的工作设备,来满足自动化生产制造的需要,因此,在进行机器人的工作设备的安装使用中,保证工作设备的定位精度成为了满足自动化生产精度的必要条件。
3、但是,针对目前的机器人工作设备的定位,例如抓手的定位,一般采用定位销与定位机构的间隙配合模式来实现,例如定位销与石墨衬套的间隙配合,定位销与定位机构的接触面积较大,在长期配合的过程中,定位销的移动易对石墨衬套等定位机构造成较大磨损,从而造成机器人的两个工作设备的匹配精度的下降,对自动化生产中的精度造成不利影响。
技术实现思路
1、本实用新型解决的问题是如何降低机器人的两个工作设备匹配过程中定位机构产生的磨损,以满足机器人在自动化生产中的精度要求。
2、为解决上述问题,一方面,本实用新型提供一种滚动定位结构,包括:
3、定位板,所述定位板上设有定位孔,所述定位板用于安装在机器人的第一工作设备上;
4、定位总成,所述定位总成包括支撑块和多个滚动轴承,所述支撑块安装在所述定位板上,所述滚动轴承装设于所述支撑块上,多个所述滚动轴承沿所述定位孔的周向等间隔设置,形成定位通道,以供所述机器人的第二工作设备的定位销经所述定位通道进出所述定位孔,所述滚动轴承用于与所述定位销的侧壁相接触,并沿所述定位销的进出移动方向往复滚动。
5、相对于现有技术,本实用新型的滚动定位结构的有益效果包括:设置定位板作为整个滚动定位结构的支撑机构,可有效提升滚动定位结构的拆装和维护的便捷性;在定位板上安装由支撑块和多个滚动轴承组成的定位总成,多个滚动轴承沿定位孔的周向间隔等间隔设置,从而形成一个与定位孔相对应的定位通道,机器人的第二工作设备的定位销可经定位通道进出定位孔,而滚动轴承可与定位销的侧壁相接触,并沿定位销的移动方向往复滚动,在进行第一工作设备和第二工作设备的匹配定位时,滚动轴承与定位销的侧壁上的接触为线接触,接触面积较小,定位销与滚动轴承之间产生的磨损较小,且摩擦方式为滚动摩擦,滚动轴承自身的转动抵消掉了定位销在匹配过程中对滚动轴承的长期磨损,有效降低机器人的两个工作设备匹配过程中定位机构产生的磨损,以满足机器人在自动化生产中的精度要求;在此基础上,多个滚动轴承绕定位孔的周向等间隔设置,可保持滚动轴承和定位销的受力平衡,进一步降低定位销与滚动轴承之间产生磨损的可能。
6、可选地,所述支撑块具有多个,多个所述支撑块沿所述定位孔的周向间隔设置,多个所述滚动轴承分布于多个所述支撑块上,其中,至少一个所述支撑块与所述定位板可拆卸连接。
7、可选地,所述定位总成还包括销轴和销轴挡片,所述滚动轴承通过所述销轴安装在所述支撑块上,且用于绕所述销轴滚动,所述销轴的端部穿过所述支撑块,且与所述支撑块侧壁上的所述销轴挡片相连接。
8、可选地,所述支撑块包括第一支撑块和第二支撑块,所述第一支撑块和所述第二支撑块分别设于所述定位孔的两侧,且均安装在所述定位板上,所述第二支撑块与所述定位板可拆卸连接;
9、所述滚动轴承包括第一滚动轴承和第二滚动轴承,所述第一滚动轴承和所述第二滚动轴承分别设于所述第一支撑块和所述第二支撑块上,且均具有两个,一所述第一滚动轴承和一所述第二滚动轴承沿第一方向对称设于所述定位孔的两侧,另一所述第一滚动轴承和另一所述第二滚动轴承沿第二方向对称设于所述定位孔的两侧;
10、其中,所述第一方向与所述第二方向相互垂直,且均与所述定位板的安装端面相平行。
11、可选地,所述第一支撑块的侧壁上设有与所述定位孔的内壁相对应的缺口,所述缺口的两侧壁上分别设有两个第一安装槽,两个所述第一安装槽分别沿所述第一方向和所述第二方向设置,且分别用于安装两个所述第一滚动轴承。
12、可选地,所述第二支撑块为l形结构件,所述l形结构件包括沿所述第一方向设置的第一支撑臂和沿所述第二方向设置的第二支撑臂,所述支撑块还包括轴承连接件,所述轴承连接件具有两个,且分别设于所第一支撑臂和所述第二支撑臂上,所述轴承连接件上设有开口朝向所述定位孔的第二安装槽,两个所述第二安装槽分别用于安装两个所述第二滚动轴承。
13、可选地,所述第一支撑臂和所述第二支撑臂上分别设置有朝向所述定位孔的第一调节孔和第二调节孔,所述第一调节孔和所述第二调节孔均具有多个,多个所述第一调节孔沿所述第一方向设置,且用于供第一螺钉穿入与一所述轴承连接件相连接,多个所述第二调节孔沿所述第二方向设置,且用于供第二螺钉穿入与另一所述轴承连接件相连接。
14、可选地,一所述轴承连接件与所述第一支撑臂之间和另一所述轴承连接件与所述第二支撑臂之间均设有多个调节垫片,所述多个调节垫片叠放设置。
15、可选地,所述定位板上还设有第一安装孔和第二安装孔,所述支撑块上设有第三安装孔,所述第一安装孔用于供与所述第一工作设备相连接的第三螺钉穿入,所述第三安装孔用于供第四螺钉穿过,所述第四螺钉安装在所述第二安装孔内。
16、另一方面,本实用新型还提供一种机器人,包括第一工作设备、第二工作设备和如上所述的滚动定位结构。
17、相对于现有技术,本实用新型的机器人的有益效果与如上所述的滚动定位结构的有益效果相同,在此不再赘述。
技术特征:
1.一种滚动定位结构,其特征在于,包括:
2.根据权利要求1所述的滚动定位结构,其特征在于,所述支撑块(21)具有多个,多个所述支撑块(21)沿所述定位孔(11)的周向间隔设置,多个所述滚动轴承(22)分布于多个所述支撑块(21)上,其中,至少一个所述支撑块(21)与所述定位板(1)可拆卸连接。
3.根据权利要求1所述的滚动定位结构,其特征在于,所述定位总成(2)还包括销轴(23)和销轴挡片(24),所述滚动轴承(22)通过所述销轴(23)安装在所述支撑块(21)上,且用于绕所述销轴(23)滚动,所述销轴(23)的端部穿过所述支撑块(21),且与所述支撑块(21)侧壁上的所述销轴挡片(24)相连接。
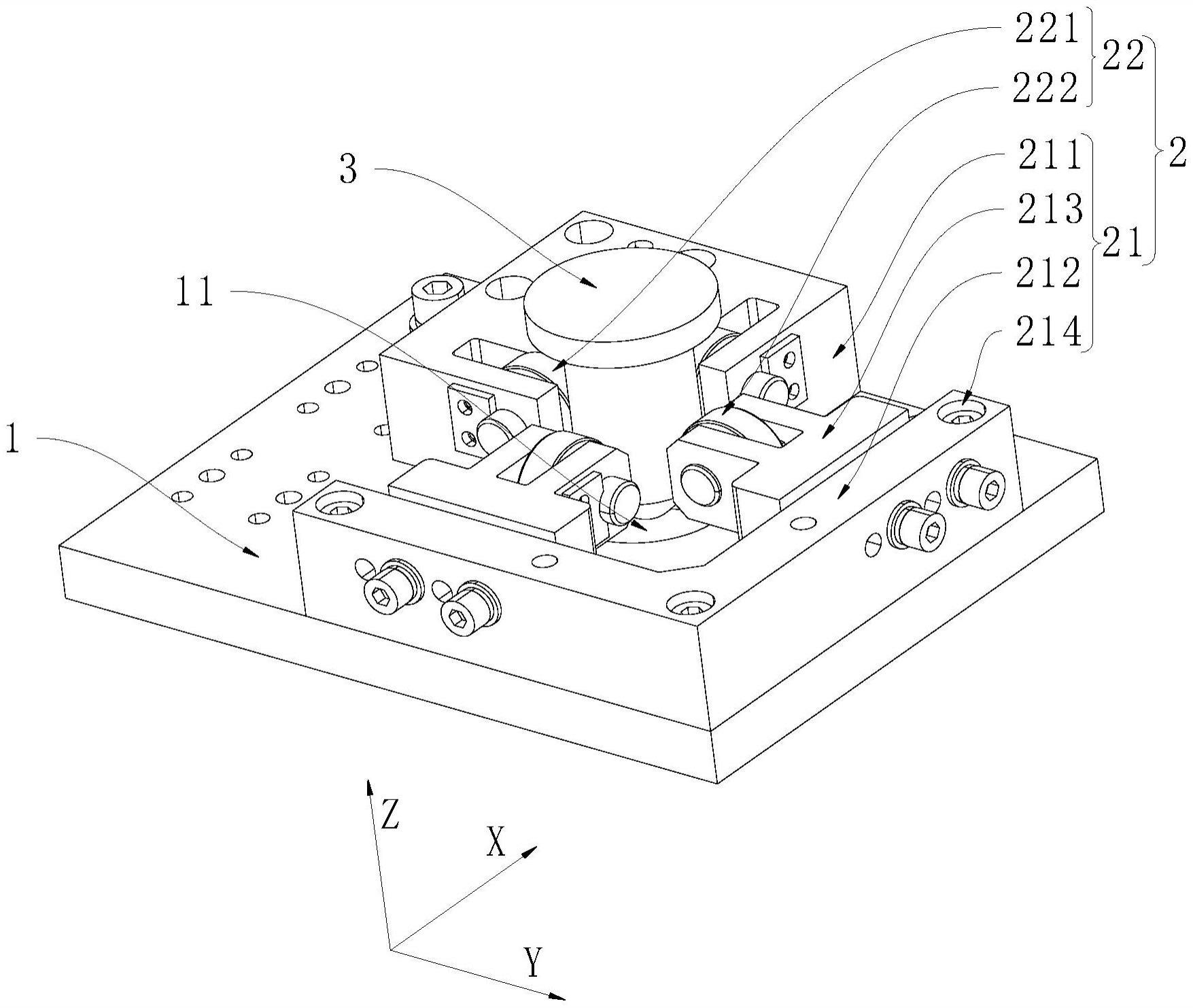
4.根据权利要求1所述的滚动定位结构,其特征在于,所述支撑块(21)包括第一支撑块(211)和第二支撑块(212),所述第一支撑块(211)和所述第二支撑块(212)分别设于所述定位孔(11)的两侧,且均安装在所述定位板(1)上,所述第二支撑块(212)与所述定位板(1)可拆卸连接;
5.根据权利要求4所述的滚动定位结构,其特征在于,所述第一支撑块(211)的侧壁上设有与所述定位孔(11)的内壁相对应的缺口(2111),所述缺口(2111)的两侧壁上分别设有两个第一安装槽,两个所述第一安装槽分别沿所述第一方向和所述第二方向设置,且分别用于安装两个所述第一滚动轴承(221)。
6.根据权利要求4所述的滚动定位结构,其特征在于,所述第二支撑块(212)为l形结构件,所述l形结构件包括沿所述第一方向设置的第一支撑臂(2121)和沿所述第二方向设置的第二支撑臂(2122),所述支撑块(21)还包括轴承连接件(213),所述轴承连接件(213)具有两个,且分别设于所第一支撑臂(2121)和所述第二支撑臂(2122)上,所述轴承连接件(213)上设有开口朝向所述定位孔(11)的第二安装槽,两个所述第二安装槽分别用于安装两个所述第二滚动轴承(222)。
7.根据权利要求6所述的滚动定位结构,其特征在于,所述第一支撑臂(2121)和所述第二支撑臂(2122)上分别设置有朝向所述定位孔(11)的第一调节孔(21211)和第二调节孔(21221),所述第一调节孔(21211)和所述第二调节孔(21221)均具有多个,多个所述第一调节孔(21211)沿所述第一方向设置,且用于供第一螺钉穿入与一所述轴承连接件(213)相连接,多个所述第二调节孔(21221)沿所述第二方向设置,且用于供第二螺钉穿入与另一所述轴承连接件(213)相连接。
8.根据权利要求6所述的滚动定位结构,其特征在于,一所述轴承连接件(213)与所述第一支撑臂(2121)之间和另一所述轴承连接件(213)与所述第二支撑臂(2122)之间均设有多个调节垫片(2123),所述多个调节垫片(2123)叠放设置。
9.根据权利要求1至8中任一项所述的滚动定位结构,其特征在于,所述定位板(1)上还设有第一安装孔(12)和第二安装孔(13),所述支撑块(21)上设有第三安装孔(214),所述第一安装孔(12)用于供与所述第一工作设备相连接的第三螺钉穿入,所述第三安装孔(214)用于供第四螺钉穿过,所述第四螺钉安装在所述第二安装孔(13)内。
10.一种机器人,其特征在于,包括第一工作设备、第二工作设备和如权利要求1至9中任一项所述的滚动定位结构。
技术总结
本技术提供了一种滚动定位结构及机器人。该滚动定位结构在定位板上安装由支撑块和多个滚动轴承组成的定位总成,多个滚动轴承沿定位孔的周向间隔等间隔设置,从而形成一个与定位孔相对应的定位通道,而滚动轴承可与定位销的侧壁相接触,并沿定位销的移动方向往复滚动,在进行第一工作设备和第二工作设备的匹配定位时,滚动轴承与定位销的侧壁上的接触为线接触,接触面积较小,定位销与滚动轴承之间产生的磨损较小,且摩擦方式为滚动摩擦,滚动轴承自身的转动抵消掉了定位销在匹配过程中对滚动轴承的长期磨损,有效降低机器人的两个工作设备匹配过程中定位机构产生的磨损,以满足机器人在自动化生产中的精度要求。
技术研发人员:夏阳
受保护的技术使用者:爱孚迪(上海)制造系统工程有限公司
技术研发日:20230214
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!