一种便于维护的三轴机械手的制作方法
本技术属于三轴机械手,尤其是涉及一种便于维护的三轴机械手。
背景技术:
1、三轴机械手是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备,在机械制造加工业中,三轴机械手得到了较为广泛的应用,给自动化生产带来了极大便利,也降低了人工组装所造成了不合格率。
2、在三轴机械手的日常使用过程中,为了避免长期使用造成机械手寿命的降低,因此需要对三轴机械手进行定期拆卸维护,添加润滑油以及调试等,而目前市面上常见的三轴机械手,通过膨胀螺栓等紧固件固定安装于机械手基座上,在拆卸维护的过程中,需要借助辅助工具的帮助,不便于快速拆卸,影响维护。因此,急需对现有的三轴机械手进行改进,提供一种便于维护的三轴机械手。
技术实现思路
1、本实用新型的目的在于针对现有技术中存在的不足,提供一种设计合理,结构简单,拆卸便捷,方便维护的三轴机械手,用于解决现有技术中存在的通过膨胀螺栓等紧固件固定安装于机械手基座上,在拆卸维护的过程中,需要借助辅助工具的帮助,不便于快速拆卸,影响维护等问题。
2、为了实现上述目的,本实用新型采用以下技术方案:
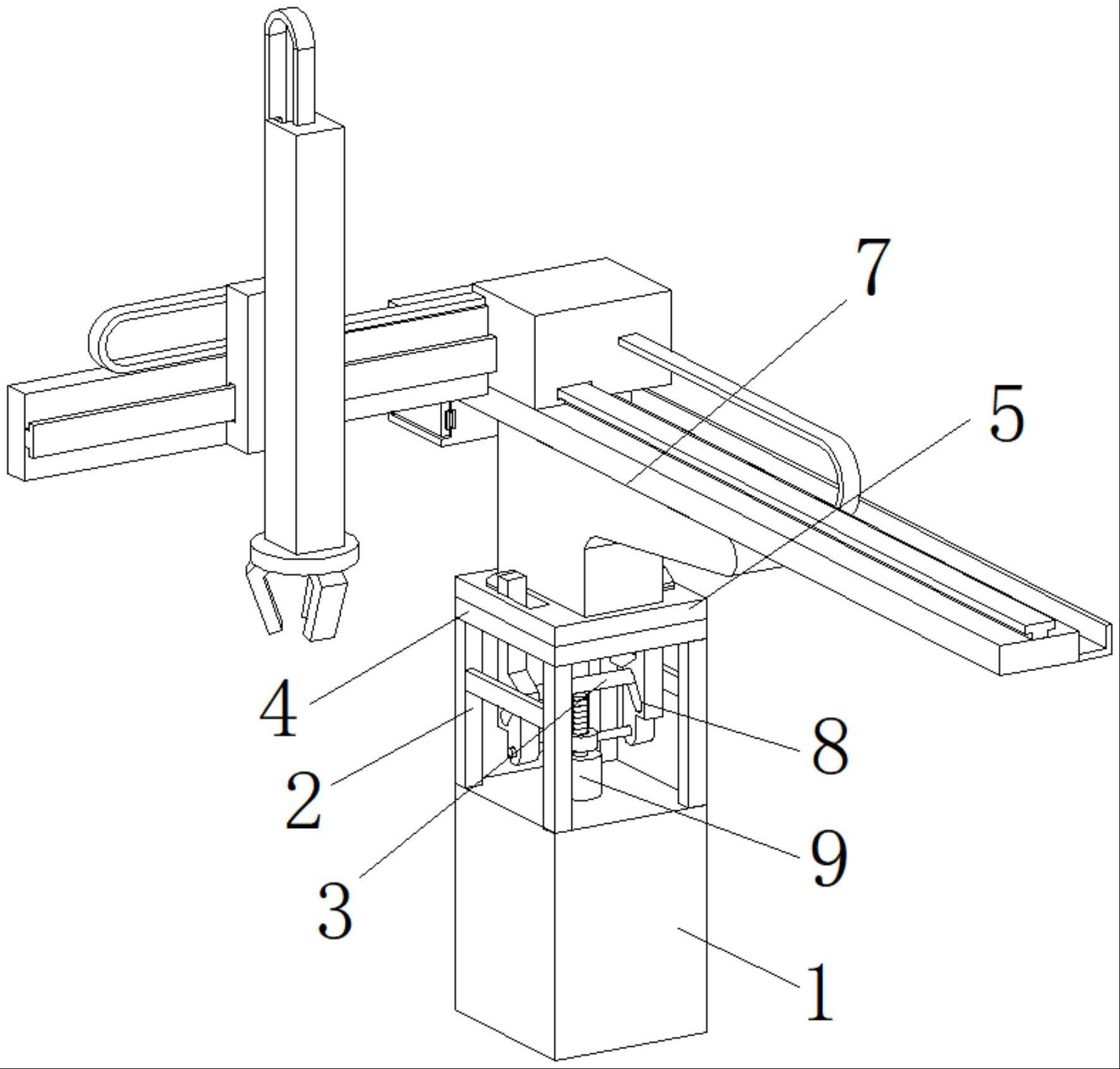
3、一种便于维护的三轴机械手,其包括支撑立柱和三轴机械手本体,所述支撑立柱的顶部设置有支撑架,两个所述支撑架之间固定连接有固定杆,支撑架的顶部设置有第一连接板,第一连接板的上方安装有第二连接板,第二连接板的上端中心处连接有限位块,限位块的外侧安装有三轴机械手本体,所述固定杆的左右两端外侧均设有夹爪,两个所述夹爪底部之间安装有升降调节组件。
4、作为一种优选的实施方式,所述支撑架的上下两端分别与第一连接板和支撑立柱固定相连,所述支撑架的纵截面为“h”形。
5、作为一种优选的实施方式,所述第一连接板的左右两端内部均开设有矩形通槽,第二连接板与第一连接板的大小形状完全相同,所述第二连接板与限位块固定相连,限位块的直径从下往上呈递减设置。
6、作为一种优选的实施方式,所述夹爪共设有两组,两组所述夹爪关于限位块的圆心呈中心点对称设置。
7、作为一种优选的实施方式,所述夹爪包括活动杆、夹块和橡胶垫,活动杆的顶部固定安装有夹块,夹块的底端面粘贴连接有橡胶垫。
8、作为一种优选的实施方式,所述活动杆底端内部开设有倾斜状导向槽,固定杆的一端位于活动杆内部的倾斜状导向槽中。
9、作为一种优选的实施方式,所述升降调节组件包括伺服电机、螺纹杆、活动套和连接杆,螺纹杆固定安装于伺服电机的输出轴上,螺纹杆的外侧螺纹连接有活动套,活动套的左右两侧均固定安装有连接杆。
10、作为一种优选的实施方式,所述伺服电机固定安装于支撑立柱的顶端中部,两个所述连接杆相互远离的一端分别与两组所述夹爪转动相连。
11、与现有技术相比,本实用新型的有益效果:
12、在本实用新型的方案中:
13、通过伺服电机控制螺纹杆旋转,能够控制活动套带动其左右两侧的连接杆以及左右两个夹爪同步上移,此时固定杆能够挤压内部开设有倾斜导向槽的活动杆,使活动杆带动夹块上移同时进行转动,使夹块位于第一连接板内部矩形通槽之上,随后即可直接将三轴机械手本体向上吊起进行便捷拆卸,达到便于维护的目的;
14、在三轴机械手本体安装时,通过直径从下往上呈递减设置的限位块,便于其与第二连接板和三轴机械手本体的便捷对接,且两组夹爪关于限位块圆心呈中心点对称设置,两组夹爪的转动方向相反,能够对第二连接板提供更加稳定的夹持定位,方便三轴机械手本体的稳固安装。
技术特征:
1.一种便于维护的三轴机械手,包括支撑立柱(1)和三轴机械手本体(7),其特征在于:所述支撑立柱(1)的顶部设置有支撑架(2),两个所述支撑架(2)之间固定连接有固定杆(3),支撑架(2)的顶部设置有第一连接板(4),第一连接板(4)的上方安装有第二连接板(5),第二连接板(5)的上端中心处连接有限位块(6),限位块(6)的外侧安装有三轴机械手本体(7),所述固定杆(3)的左右两端外侧均设有夹爪(8),两个所述夹爪(8)底部之间安装有升降调节组件(9)。
2.根据权利要求1所述的一种便于维护的三轴机械手,其特征在于:所述支撑架(2)的上下两端分别与第一连接板(4)和支撑立柱(1)固定相连,所述支撑架(2)的纵截面为“h”形。
3.根据权利要求1所述的一种便于维护的三轴机械手,其特征在于:所述第一连接板(4)的左右两端内部均开设有矩形通槽,第二连接板(5)与第一连接板(4)的大小形状完全相同,所述第二连接板(5)与限位块(6)固定相连,限位块(6)的直径从下往上呈递减设置。
4.根据权利要求1所述的一种便于维护的三轴机械手,其特征在于:所述夹爪(8)共设有两组,两组所述夹爪(8)关于限位块(6)的圆心呈中心点对称设置。
5.根据权利要求1所述的一种便于维护的三轴机械手,其特征在于:所述夹爪(8)包括活动杆(81)、夹块(82)和橡胶垫(83),活动杆(81)的顶部固定安装有夹块(82),夹块(82)的底端面粘贴连接有橡胶垫(83)。
6.根据权利要求5所述的一种便于维护的三轴机械手,其特征在于:所述活动杆(81)底端内部开设有倾斜状导向槽,固定杆(3)的一端位于活动杆(81)内部的倾斜状导向槽中。
7.根据权利要求1所述的一种便于维护的三轴机械手,其特征在于:所述升降调节组件(9)包括伺服电机(91)、螺纹杆(92)、活动套(93)和连接杆(94),螺纹杆(92)固定安装于伺服电机(91)的输出轴上,螺纹杆(92)的外侧螺纹连接有活动套(93),活动套(93)的左右两侧均固定安装有连接杆(94)。
8.根据权利要求7所述的一种便于维护的三轴机械手,其特征在于:所述伺服电机(91)固定安装于支撑立柱(1)的顶端中部,两个所述连接杆(94)相互远离的一端分别与两组所述夹爪(8)转动相连。
技术总结
本技术属于三轴机械手技术领域,尤其是涉及一种便于维护的三轴机械手,包括支撑立柱和三轴机械手本体,所述支撑立柱的顶部设置有支撑架,两个所述支撑架之间固定连接有固定杆,支撑架的顶部设置有第一连接板,第一连接板的上方安装有第二连接板,第二连接板的上端中心处连接有限位块,限位块的外侧安装有三轴机械手本体。本技术在三轴机械手本体安装时,通过直径从下往上呈递减设置的限位块,便于其与第二连接板和三轴机械手本体的便捷对接,且两组夹爪关于限位块圆心呈中心点对称设置,两组夹爪的转动方向相反,能够对第二连接板提供更加稳定的夹持定位,方便三轴机械手本体的稳固安装。
技术研发人员:何先德,谭成龙
受保护的技术使用者:四川拓讯科技有限公司
技术研发日:20230216
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!