一种协同康复机器人的下肢康复治疗结构的制作方法
本技术涉及采样设备的,尤其涉及一种协同康复机器人的下肢康复治疗结构。
背景技术:
1、康复机器人作为医疗机器人的一个重要分支,它的研究贯穿了康复医学、生物力学、机械学、机械力学、电子学、材料学、计算机科学以及机器人学等诸多领域,已经成为国际机器人领域的一个研究热点,康复机器人已经广泛地应用到康复护理、假肢和康复治疗等方面,这不仅促进了康复医学的发展,也带动了相关领域的新技术和新理论的发展。
2、在现有技术中,康复机器人需要配合其他的治疗结构进行使用,例如下肢康复结构,下肢康复结构在使用的过程当中需要将其套设在腿部,同时延伸部分结构对脚部进行防护,然而在实际使用的过程下体康复结构需要套设在大概在膝盖以上位置处,同时脚部防护结构还需要与脚底进行接触,然而由于人与人的人体结构比例不同,现有的很多下肢康复治疗结构无法对脚部的防护结构进行距离调节,只能将主体向下移动至膝盖处,甚至膝盖下方,一般来说小腿要小于大腿,而护理主体的固定处是根据大腿的周长来设计的,移动到小腿位置处,容易造成固定得不够稳固。
技术实现思路
1、本实用新型的目的在于克服现有技术之缺陷,提供一种协同康复机器人的下肢康复治疗结构,以解决现有技术中康复治疗结构调节性较差需要护理主体向下移动从而导致固定得不够稳定的技术问题。
2、本实用新型是这样实现的,一种协同康复机器人的下肢康复治疗结构,包括:
3、护理主体,用以对下肢进防护;
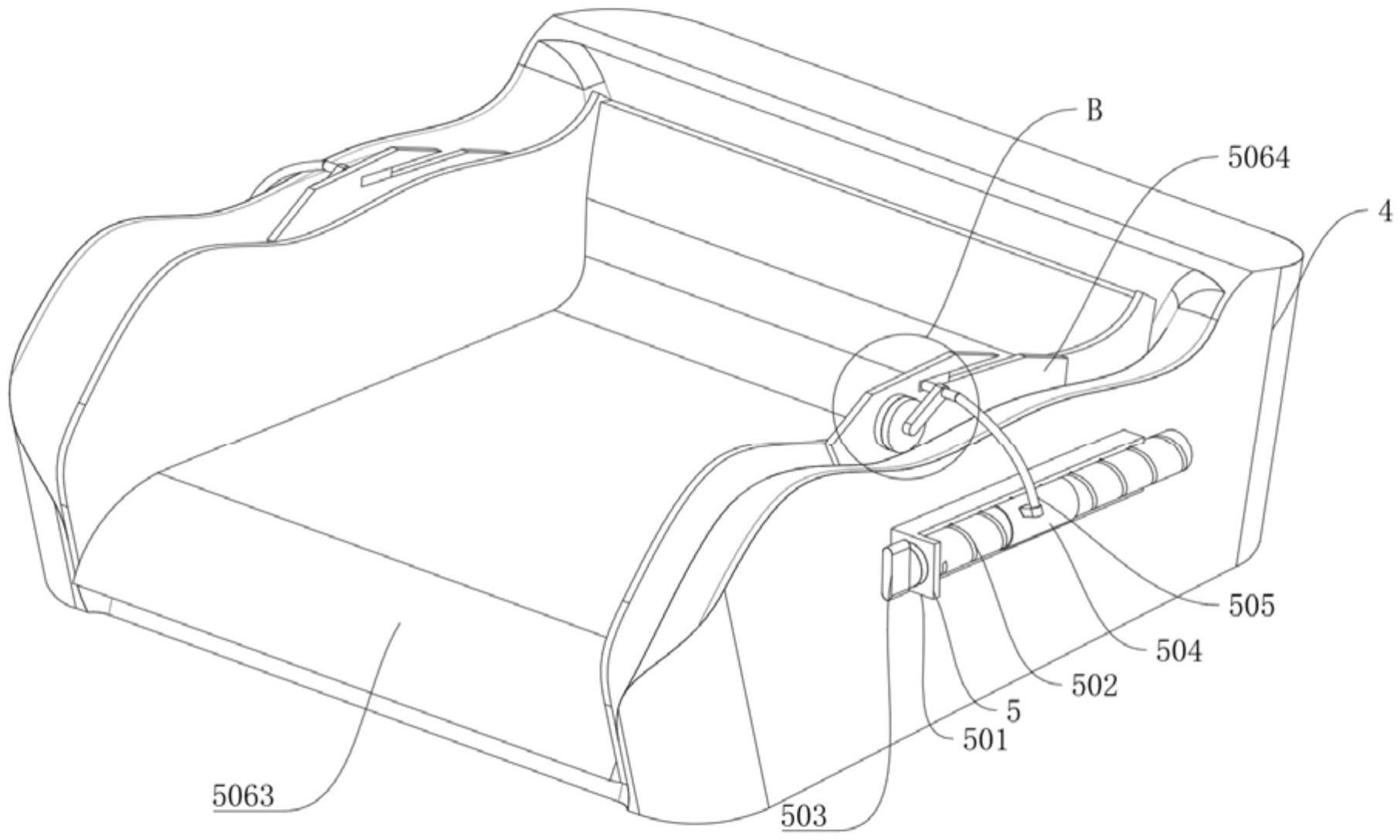
4、调节机构,用以对其他机构进行高度调节的主要结构,所述调节机构包括套筒、卡合板、横板、竖板、转杆、连接杆、圆板、扭簧、受力板、承接杆和卡合块,所述套筒固定安装于护理主体外表面;
5、脚部承接板,用以承接脚部,为脚部提供受力点,所述脚部承接板设置于调节机构的底部;
6、脚部承接机构,用以作为脚部承接板的延伸机构,所述脚部承接机构包括侧板、螺纹杆、旋钮、螺纹圆筒、弧形杆、限位机构、短杆和滑动块,所述侧板固定安装于脚部承接板的侧面;
7、软性垫,用以对脚部承接机构提供受力空间,所述软性垫设置于脚部承接机构和脚部承接板之间;
8、限位机构,用以对脚部承接机构进行调节,所述限位机构包括滑动杆、第一磁块、内垫、顶板和第二磁块,所述滑动杆与脚部承接机构之间连接。
9、具体地,所述套筒的内壁滑动安装有卡合板,所述卡合板通过与套筒的内壁进行连接,增加摩擦力,同时套筒为卡合板提供受力点,所述套筒的外表面固定安装有横板,所述横板的外表面固定安装有竖板,所述竖板的外表面转动安装有转杆,以转杆为主体带动部分结构与卡合板连接对卡合板进行限位,所述竖板的外表面固定安装有连接杆,所述连接杆远离竖板的一端固定安装有圆板,所述转杆的外表面固定安装有受力板,所述受力板的外表面固定安装有扭簧,所述扭簧用于对转杆进行限位,同时通过扭簧输出的力进行持续限位,所述转杆的外表面固定安装有承接杆,所述承接杆远离转杆的一端固定安装有卡合块,所述卡合块用于于卡合板进行卡合连接,并且通过扭簧的力持续卡合在卡合板的内壁之中。
10、进一步地,通过调节机构当中的卡合板带动底部的结构进行升降,那么在升降的过程当中起到了调节的目的,同时调节机构当中通过卡合块以及扭簧的力对卡合板进行位置限定,起到了固定的作用,在原有的基础上增加整体的调节性。
11、具体地,所述限位机构包括弧形杆固定连接的滑动杆,所述滑动杆的外表面固定安装有第一磁块,所述软性垫的顶部设置有内垫,所述内垫的外表面固定安装有第二磁块,所述第二磁块用于与第一磁块进行连接,两者异磁极相对,从而起到对内垫进行固定的作用,所述内垫的外表面固定安装有顶板。
12、进一步地,通过第一磁块和第二磁块之间互相吸附对内垫进行固定,防止内垫出现偏移的情况。
13、具体地,所述顶板的外表面开设有限位凹槽,所述滑动杆的外表面固定安装有短杆,所述短杆的外表面固定安装有滑动块,所述滑动块的内壁和限位凹槽的内壁均设置有橡胶垫,两者互相摩擦,从而进一步的提高两者之间的连接性。
14、具体地,所述内垫的底部与软性垫的顶部相贴合,软性垫用于对脚部所受到和造成的震动进行缓冲。
15、具体地,所述扭簧的一端与圆板的外表面固定连接,所述扭簧的另一端与受力板固定连接,扭簧通过受力板将力传输至转杆处。
16、与现有技术相比,本实用新型的有益效果是:
17、可以将承接杆掰起,使承接杆带动卡合块卡合板外表面上的凹槽当中移动出,然后根据实际情况向上或者向下滑动卡合板,然后卡合板移动到合适的位置后,松开承接杆,此时圆板外表面上的扭簧开始回弹,扭簧回弹的过程当中将会带动受力板转动,从而带动与受力板固定连接的转杆转动,此后将会将力回弹到承接杆的位置处,承接杆带动卡合块进入到卡合板外表面上的卡合凹槽位置处,以上述方式对脚部承接板以及脚部承接机构的位置进行调节,尽可能地使主体固定于大腿处,保证固定时的稳定性;
18、脚部承接机构基于脚部承接板所使用,为了避免脚部承接板有细菌滋生需要定期对其进行消毒,当需要进行消毒时,顺时针转动旋钮,旋钮在受力之后将会带动与其固定连接的螺纹杆进行旋转,螺纹杆在进行转动的过程当中将会带动螺纹圆筒进行移动,螺纹圆筒在移动时将会带动弧形杆进行移动,那么在此种情况下将会推动短杆以及滑动块进行移动,从而使其离开限位凹槽的内壁,同时滑动杆也将会带动第一磁块与第二磁块分离,此时滑动块与限位凹槽之间没有贴合,同时两个磁块之间没有进行吸附那么在此时便可以将内垫取出,对其进行消毒,后期通过反向操作对其进行固定,通过上述方式将内垫拆除消毒后进行安装,避免真菌感染的可能。
技术特征:
1.一种协同康复机器人的下肢康复治疗结构,其特征在于,包括:
2.如权利要求1所述的一种协同康复机器人的下肢康复治疗结构,其特征在于:所述套筒的内壁滑动安装有卡合板,所述卡合板通过与套筒的内壁进行连接,增加摩擦力,同时套筒为卡合板提供受力点,所述套筒的外表面固定安装有横板,所述横板的外表面固定安装有竖板,所述竖板的外表面转动安装有转杆,以转杆为主体带动部分结构与卡合板连接对卡合板进行限位,所述竖板的外表面固定安装有连接杆,所述连接杆远离竖板的一端固定安装有圆板,所述转杆的外表面固定安装有受力板,所述受力板的外表面固定安装有扭簧,所述扭簧用于对转杆进行限位,同时通过扭簧输出的力进行持续限位,所述转杆的外表面固定安装有承接杆,所述承接杆远离转杆的一端固定安装有卡合块,所述卡合块用于于卡合板进行卡合连接,并且通过扭簧的力持续卡合在卡合板的内壁之中。
3.如权利要求1所述的一种协同康复机器人的下肢康复治疗结构,其特征在于:所述侧板的外表面转动安装有螺纹杆,所述螺纹杆的外表面套设有螺纹圆筒,所述螺纹圆筒可以根据螺纹杆的转动而进行移动,所述螺纹杆的一端固定安装有旋钮,所述螺纹圆筒的外表面固定安装有弧形杆,所述弧形杆远离螺纹圆筒的一端设置有限位机构。
4.如权利要求3所述的一种协同康复机器人的下肢康复治疗结构,其特征在于:所述限位机构包括与弧形杆固定连接的滑动杆,所述滑动杆的外表面固定安装有第一磁块,所述软性垫的顶部设置有内垫,所述内垫的外表面固定安装有第二磁块,所述第二磁块用于与第一磁块进行连接,两者异磁极相对,从而起到对内垫进行固定的作用,所述内垫的外表面固定安装有顶板。
5.如权利要求4所述的一种协同康复机器人的下肢康复治疗结构,其特征在于:所述顶板的外表面开设有限位凹槽,所述滑动杆的外表面固定安装有短杆,所述短杆的外表面固定安装有滑动块,所述滑动块的内壁和限位凹槽的内壁均设置有橡胶垫,两者互相摩擦,从而进一步的提高两者之间的连接性。
6.如权利要求4所述的一种协同康复机器人的下肢康复治疗结构,其特征在于:所述内垫的底部与软性垫的顶部相贴合,软性垫用于对脚部所受到和造成的震动进行缓冲。
7.如权利要求2所述的一种协同康复机器人的下肢康复治疗结构,其特征在于:所述扭簧的一端与圆板的外表面固定连接,所述扭簧的另一端与受力板固定连接,扭簧通过受力板将力传输至转杆处。
技术总结
一种协同康复机器人的下肢康复治疗结构,包括:护理主体,用于对下肢进防护;调节机构,所述调节机构设置于护理主体的外表面处,可以将承接杆掰起,使承接杆带动卡合块卡合板外表面上的凹槽当中移动出,然后根据实际情况向上或者向下滑动卡合板,然后卡合板移动到合适的位置后,松开承接杆,此时圆板外表面上的扭簧开始回弹,扭簧回弹的过程当中将会带动受力板转动,从而带动与受力板固定连接的转杆转动,此后将会将力回弹到承接杆的位置处,承接杆带动卡合块进入到卡合板外表面上的卡合凹槽位置处,以上述方式对脚部承接板以及脚部承接机构的位置进行调节,尽可能地使主体固定于大腿处,保证固定时的稳定性。
技术研发人员:罗阳斌,李泽昊,林巧,林子仪,谢云,酉林峰,童雨露,王胜依
受保护的技术使用者:连云港圣安医院有限公司
技术研发日:20230216
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!