一种四轴运动桁架机器人的制作方法
本技术涉及一种物流设备,尤其涉及一种四轴运动桁架机器人。
背景技术:
1、在汽车总装生产线运行过程中,为了降低劳动强度和人力成本,对总装配件、辅件的物料车上下线自动化需求越来越高,而传统生产线都是通过人工作业来实现装载有总装配件、辅件的物料车在上下线的上下料,这种作业方式费时费力,浪费人力,效率低。故亟需设计一种桁架机器人,来实现总装配件、辅件的物料车的自动上下料,从而提升汽车总装产线物料上下线的自动化程度,精准、快速、可靠。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种四轴运动桁架机器人,以解决上述问题。
2、本实用新型解决上述技术问题的技术方案如下:一种四轴运动桁架机器人,包括移动机器人支撑框架、机器人底座、x轴运动部件和z轴升降杆,所述移动机器人支撑框架固定连接于厂房机架上,所述机器人底座在所述x轴运动部件上沿x轴方向平移,所述移动机器人支撑框架内设有y轴运动部件用以带动所述x轴运动部件在所述移动机器人支撑框架内沿y轴方向平移,所述z轴升降杆竖直设置且其穿过所述机器人底座,所述机器人底座上设有z轴运动部件用以带动所述z轴升降杆升降,所述z轴升降杆底端设有r轴旋转部件,所述r轴旋转部件下方设有连接设备,所述r轴旋转部件带动所述连接设备旋转。
3、本实用新型的有益效果是:通过珩架机器人自动完成载有总装配件、辅件的物料车上下线来代替人工上下料。总装配件、辅件的物料车配送方式是通过自动导引车/人工将物料车牵引至物料上线区,珩架机器人接受系统指令自通过z轴提升梁上的伸缩货叉自动调整位置叉限物料区内的物料车,通过z轴提升、r轴旋转、x轴横向移动、y轴纵向移动完成物料车的精准上下线,大大提升了汽车总装产线物料上下线的自动化程度,精准、快速、可靠。
4、在上述技术方案的基础上,本实用新型还可以做如下改进。
5、所述x轴运动部件包括x轴机架、x轴齿条和两个对称设置的x轴滑轨,所述x轴滑轨和所述x轴齿条均沿x轴方向设置且其均固定连接于所述x轴机架顶部,所述机器人底座在所述x轴滑轨上滑动连接,所述机器人底座顶部安装有x轴驱动装置,所述x轴驱动装置的动力输出端安装有x轴传动齿轮,所述x轴传动齿轮与所述x轴齿条啮合从而带动所述机器人底座沿x轴平移。
6、所述x轴机架的两端均固定连接有y轴基板,每个所述y轴基板外侧均安装有多个y轴支撑导向槽轮。
7、所述y轴运动部件包括y轴齿条和两个对称设置的y轴导轨,所述y轴导轨和所述y轴齿条均沿y轴方向设置且其均固定连接于所述移动机器人支撑框架内侧,所述y轴导轨与所述y轴基板一一对应,所述y轴支撑导向槽轮在对应的所述y轴导轨上滚动,所述机器人底座顶部安装有y轴驱动装置,所述y轴驱动装置的动力输出端安装有y轴传动齿轮,所述y轴传动齿轮与所述y轴齿条啮合从而带动所述x轴机架沿y轴平移。
8、所述z轴运动部件包括两个对称且竖直设置的z轴机架,所述z轴升降杆位于两个所述z轴机架之间,每个所述z轴机架内侧均固定连接有竖直设置的z轴滑轨,z轴升降杆两侧对称固定连接有与所述z轴滑轨相匹配的z轴滑块,所述机器人底座顶部安装有z轴驱动装置,所述z轴驱动装置的动力输出端安装有z轴传动齿轮,所述z轴升降杆上还固定连接有竖直设置的z轴齿条,所述z轴传动齿轮与所述z轴齿条啮合从而带动所述z轴升降杆升降。
9、所述r轴旋转部件包括r轴旋转机架、旋转传动部件外壳、r轴驱动装置安装座、r轴驱动装置、r轴旋转传动轴和r轴旋转传动齿轮,所述r轴旋转机架的顶端和底端分别固定连接于所述z轴升降杆的底端和所述旋转传动部件外壳的顶部,r轴驱动装置安装座固定连接于所述旋转传动部件外壳的顶部,所述r轴驱动装置安装于所述r轴驱动装置安装座顶部,所述r轴旋转传动轴和所述r轴旋转传动齿轮位于所述旋转传动部件外壳内,所述r轴旋转传动轴竖直设置且其转动连接于所述r轴驱动装置安装座,所述r轴旋转传动轴与所述r轴驱动装置的动力输出轴同轴的固定连接,所述r轴旋转传动齿轮安装于所述r轴旋转传动轴上,所述r轴旋转传动齿轮通过齿轮啮合传动带动所述连接设备旋转。
技术特征:
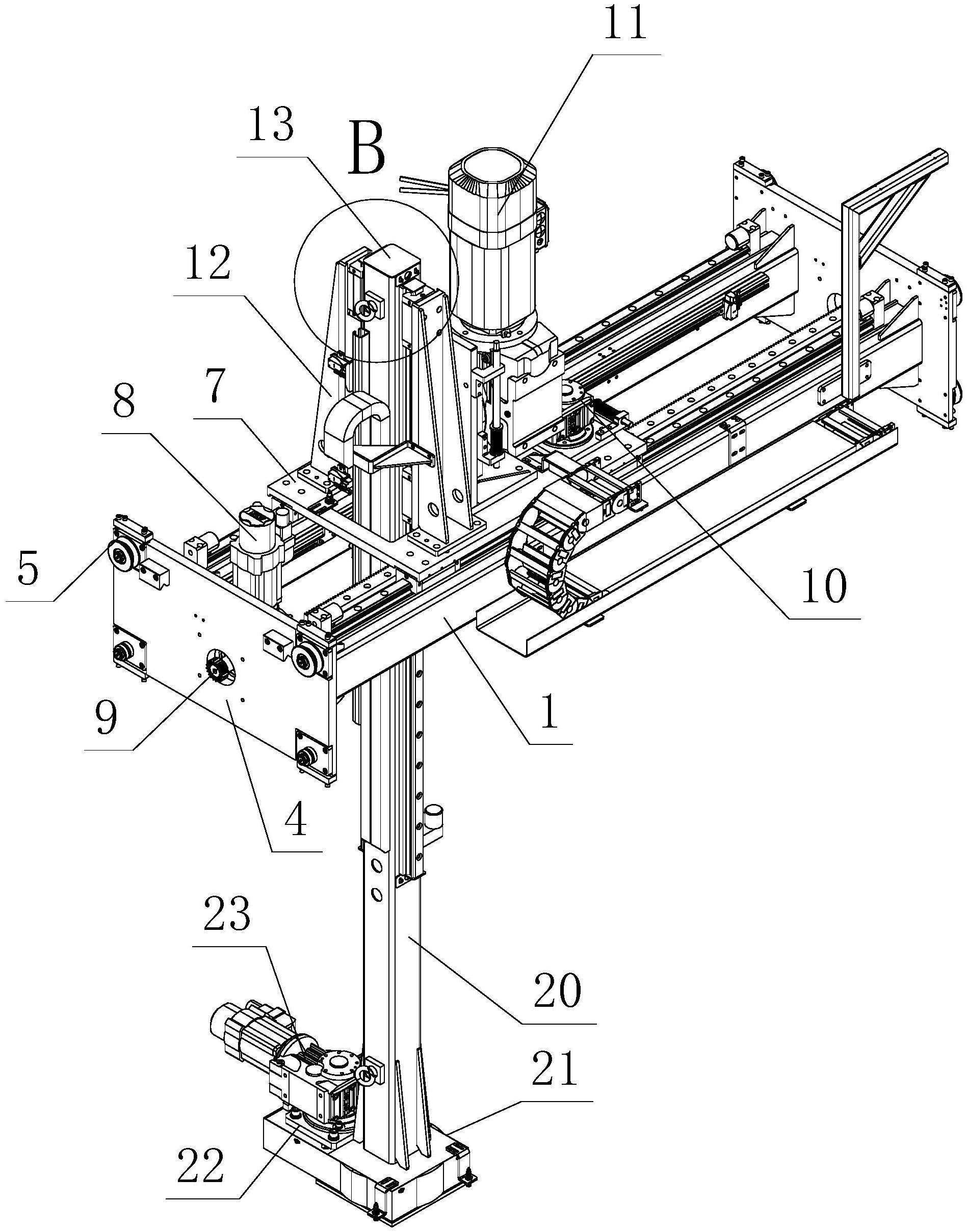
1.一种四轴运动桁架机器人,其特征在于,包括移动机器人支撑框架(16)、机器人底座(7)、x轴运动部件和z轴升降杆(13),所述移动机器人支撑框架(16)固定连接于厂房机架(15)上,所述机器人底座(7)在所述x轴运动部件上沿x轴方向平移,所述移动机器人支撑框架(16)内设有y轴运动部件用以带动所述x轴运动部件在所述移动机器人支撑框架(16)内沿y轴方向平移,所述z轴升降杆(13)竖直设置且其穿过所述机器人底座(7),所述机器人底座(7)上设有z轴运动部件用以带动所述z轴升降杆(13)升降,所述z轴升降杆(13)底端设有r轴旋转部件,所述r轴旋转部件下方设有连接设备,所述r轴旋转部件带动所述连接设备旋转。
2.根据权利要求1所述一种四轴运动桁架机器人,其特征在于,所述x轴运动部件包括x轴机架(1)、x轴齿条(3)和两个对称设置的x轴滑轨(2),所述x轴滑轨(2)和所述x轴齿条(3)均沿x轴方向设置且其均固定连接于所述x轴机架(1)顶部,所述机器人底座(7)在所述x轴滑轨(2)上滑动连接,所述机器人底座(7)顶部安装有x轴驱动装置(10),所述x轴驱动装置(10)的动力输出端安装有x轴传动齿轮(14),所述x轴传动齿轮(14)与所述x轴齿条(3)啮合从而带动所述机器人底座(7)沿x轴平移。
3.根据权利要求2所述一种四轴运动桁架机器人,其特征在于,所述x轴机架(1)的两端均固定连接有y轴基板(4),每个所述y轴基板(4)外侧均安装有多个y轴支撑导向槽轮(5)。
4.根据权利要求3所述一种四轴运动桁架机器人,其特征在于,所述y轴运动部件包括y轴齿条(18)和两个对称设置的y轴导轨(17),所述y轴导轨(17)和所述y轴齿条(18)均沿y轴方向设置且其均固定连接于所述移动机器人支撑框架(16)内侧,所述y轴导轨(17)与所述y轴基板(4)一一对应,所述y轴支撑导向槽轮(5)在对应的所述y轴导轨(17)上滚动,所述机器人底座(7)顶部安装有y轴驱动装置(8),所述y轴驱动装置(8)的动力输出端安装有y轴传动齿轮(9),所述y轴传动齿轮(9)与所述y轴齿条(18)啮合从而带动所述x轴机架(1)沿y轴平移。
5.根据权利要求1所述一种四轴运动桁架机器人,其特征在于,所述z轴运动部件包括两个对称且竖直设置的z轴机架(12),所述z轴升降杆(13)位于两个所述z轴机架(12)之间,每个所述z轴机架(12)内侧均固定连接有竖直设置的z轴滑轨(26),z轴升降杆(13)两侧对称固定连接有与所述z轴滑轨(26)相匹配的z轴滑块(27),所述机器人底座(7)顶部安装有z轴驱动装置(11),所述z轴驱动装置(11)的动力输出端安装有z轴传动齿轮(6),所述z轴升降杆(13)上还固定连接有竖直设置的z轴齿条(19),所述z轴传动齿轮(6)与所述z轴齿条(19)啮合从而带动所述z轴升降杆(13)升降。
6.根据权利要求1所述一种四轴运动桁架机器人,其特征在于,所述r轴旋转部件包括r轴旋转机架(20)、旋转传动部件外壳(21)、r轴驱动装置安装座(22)、r轴驱动装置(23)、r轴旋转传动轴(24)和r轴旋转传动齿轮(25),所述r轴旋转机架(20)的顶端和底端分别固定连接于所述z轴升降杆(13)的底端和所述旋转传动部件外壳(21)的顶部,r轴驱动装置安装座(22)固定连接于所述旋转传动部件外壳(21)的顶部,所述r轴驱动装置(23)安装于所述r轴驱动装置安装座(22)顶部,所述r轴旋转传动轴(24)和所述r轴旋转传动齿轮(25)位于所述旋转传动部件外壳(21)内,所述r轴旋转传动轴(24)竖直设置且其转动连接于所述r轴驱动装置安装座(22),所述r轴旋转传动轴(24)与所述r轴驱动装置(23)的动力输出轴同轴的固定连接,所述r轴旋转传动齿轮(25)安装于所述r轴旋转传动轴(24)上,所述r轴旋转传动齿轮(25)通过齿轮啮合传动带动所述连接设备旋转。
技术总结
本技术涉及一种四轴运动桁架机器人,包括移动机器人支撑框架、机器人底座、X轴运动部件和Z轴升降杆,移动机器人支撑框架固定连接于厂房机架上,机器人底座在X轴运动部件上沿X轴方向平移,移动机器人支撑框架内设有Y轴运动部件用以带动X轴运动部件在移动机器人支撑框架内沿Y轴方向平移,Z轴升降杆竖直设置且其穿过机器人底座,机器人底座上设有Z轴运动部件用以带动Z轴升降杆升降,Z轴升降杆底端设有R轴旋转部件,R轴旋转部件下方设有连接设备,R轴旋转部件带动连接设备旋转。有益效果:珩架机器人自动完成载有总装配件、辅件的物料车上下线来代替人工上下料。提升了汽车总装产线物料上下线的自动化程度,精准、快速、可靠。
技术研发人员:肖祖发,叶宋,石咏洲,黄开钊,张坤鹏
受保护的技术使用者:湖北三丰机器人有限公司
技术研发日:20230213
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!