一种机械臂用限位把手
本技术属于机械臂关节处限位设备,尤其是涉及一种机械臂用限位把手。
背景技术:
1、在目前现有的机械臂限位把手装置在使用时,有的会设置两块将机械臂臂身进行包括的上固定套环和下固定套环,固定套环呈弧形结构,上下两个固定套环之间构成一个环形;上固定套环的两端均设置有上固定板,下固定套环的两端均设置有下固定板;然后上固定板与下固定板上均开设有上下相通的固定孔,上固定板上的固定孔内和下固定板上的固定孔内均设置有同一根螺杆,固定孔的规格大于螺杆的规格,然后螺杆的一端设置有与之呈螺纹配合的螺母;
2、因此在使用时,首先将上固定套环与下固定套环套在机械臂的关节处,然后螺杆依次穿入上下两个固定板的固定孔内,之后螺杆的穿入端再从下固定板的固定孔内穿出,螺杆穿出之后的这一端上套上与之呈螺纹配合的螺母,因此上下两个固定板固定在一起,因此带动上固定套环和下固定套环固定在机械臂上;
3、在这个使用过程中,首先,各个零部件之间比较分散,使用的上下两个固定套环是分散的,螺杆和螺母也是分散的,因此在拿取的过程中比较麻烦,容易造成零部件之间丢失;其次,在使用时当两个上下套环套在机械臂上时,我们还需要对准固定孔的位置,如果不对准螺杆就插不进去,对准的过程中也需要一定的时间;因此将该现有机械臂限位把手固定在机械臂上的过程比较费时费力。
技术实现思路
1、根据以上现有技术中的不足,本实用新型要解决的技术问题是:提供一种机械臂用限位把手,解决了需要费时费力的将机械臂限位把手固定在机械臂上的问题。
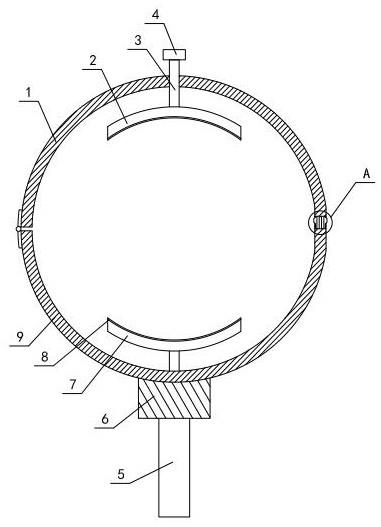
2、所述的机械臂用限位把手,包括两块呈弧形结构的第一套板和第二套板,第一套板位于第二套板的上方,第一套板和第二套板之间构成环形结构,第二套板下方设置有固定在其外侧壁上的限位杆,限位杆的底部固定有把手,所述第一套板的一端铰接在第二套板的一端上;第一套板的另一端通过锁扣组件锁定在第二套板的另一端上;第一套板和第二套板之间设置有两块用于将机械臂进行夹紧的第一夹板和第二夹板,第二夹板固定在第二套板上,第一套板上开设有内外相通的通孔,通孔内穿装有与之呈螺纹配合的螺杆;螺杆的一端与第一夹板呈旋转配合连接,其另一端位于第一套板的外侧。
3、进一步的,所述锁扣组件为插扣,插扣的母扣设置在第一套板的另一端上,插扣的公扣设置在第二套板的另一端上。
4、进一步的,所述螺杆的另一端设置有用于驱动其旋转的旋钮。
5、进一步的,所述第一夹板和第二夹板的夹持面上均设置有一层橡胶层。
6、进一步的,所述限位杆上套有用于保护机械臂的海绵。
7、与现有技术相比,本实用新型具有以下有益效果:
8、本实用新型通过将机械臂放置在第一套板和第二套板内,并位于第一夹板和第二夹板之间,然后第一套板和第二套板的另一端通过卡扣组件锁定在一起,然后旋动螺杆带动第一夹板移动,因此移动的第一夹板能够将机械臂夹紧在第一夹板和第二夹板之间;在这个使用过程中,卡扣能够实现快速的锁定和拆卸,然后第一夹板和第二夹板能够将机械臂进行夹紧,因此在这个操作过程中比较方便与便捷,不需要像现有技术中固定时,需要对准固定孔的位置插螺杆拴螺母的等操作带来费时费力的问题,本设计能够省时省力的将机械臂限位把手固定在机械臂上。
技术特征:
1.一种机械臂用限位把手,包括两块呈弧形结构的第一套板(1)和第二套板(9),第一套板(1)位于第二套板(9)的上方,第一套板(1)和第二套板(9)之间构成环形结构,第二套板(9)下方设置有固定在其外侧壁上的限位杆(6),限位杆(6)的底部固定有把手(5),其特征在于:所述第一套板(1)的一端铰接在第二套板(9)的一端上;第一套板(1)的另一端通过锁扣组件锁定在第二套板(9)的另一端上;第一套板(1)和第二套板(9)之间设置有两块用于将机械臂(13)进行夹紧的第一夹板(2)和第二夹板(7),第二夹板(7)固定在第二套板(9)上,第一套板(1)上开设有内外相通的通孔,通孔内穿装有与之呈螺纹配合的螺杆(3);螺杆(3)的一端与第一夹板(2)呈旋转配合连接,其另一端位于第一套板(1)的外侧。
2.根据权利要求1所述的机械臂用限位把手,其特征在于:所述锁扣组件为插扣,插扣的母扣(11)设置在第一套板(1)的另一端上,插扣的公扣(10)设置在第二套板(9)的另一端上。
3.根据权利要求1所述的机械臂用限位把手,其特征在于:所述螺杆(3)的另一端设置有用于驱动其旋转的旋钮(4)。
4.根据权利要求1所述的机械臂用限位把手,其特征在于:所述第一夹板(2)和第二夹板(7)的夹持面上均设置有一层橡胶层(8)。
5.根据权利要求1所述的机械臂用限位把手,其特征在于:所述限位杆(6)上套有用于保护机械臂(13)的海绵(12)。
技术总结
本技术属于机械臂关节处限位设备技术领域,尤其是涉及一种机械臂用限位把手。技术包括两块呈弧形结构的第一套板和第二套板,第一套板和第二套板之间构成环形结构,第二套板下方设置有固定在其外侧壁上的限位杆,限位杆的底部固定有把手,所述第一套板的一端铰接在第二套板的一端上;第一套板的另一端通过锁扣组件锁定在第二套板的另一端上;第一套板和第二套板之间设置有两块用于将机械臂进行夹紧的第一夹板和第二夹板,第二夹板固定在第二套板上,第一套板上开设有内外相通的通孔,通孔内穿装有螺杆;螺杆的一端与第一夹板呈旋转配合连接,其另一端位于第一套板的外侧。本设计能够省时省力的将机械臂限位把手固定在机械臂上。
技术研发人员:周维钧,潘树文,王雪洁,田强兴
受保护的技术使用者:浙大城市学院
技术研发日:20230220
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!