一种车辆装载机械手
本技术涉及机械手领域,尤其涉及一种车辆装载机械手。
背景技术:
1、随着我国经济的快速发展以及人们生活水平的提高,近年来我国也逐步出现了劳动力短缺的现象,特别是粗、笨活劳动力更是短缺。原来那种单靠人力装卸的情况将逐步被装卸机械所取代,我国装卸作业发展到现在,采用最多的是产品在托盘上码垛,产品销售时再把产品从托盘上卸掉,装车。这种方式虽然仍然消耗大量的人力,但相比传统的全人工装车,已省时、省力不少,也比发达国家连同托盘一同销售的情况节省不少费用。所以在我国目前有条件的企业,已逐步采用这种方式。即:产品在托盘上码垛,叉车在仓库内堆放,产品从托盘上卸掉装车;现有的自动机器人装车系统换向机械手臂在能够实现物品的夹取移动与摆放,但是当传送带上一些物品的摆放方式错误,例如相互叠加时,自动机器人则只能夹到上层物品边缘,在手臂转向过程中物品有掉落的危险。
2、公告号为cn215749267u的实用新型专利中公开了一种自动机器人装车系统换向机械手臂提高了装置的装车效率,其次旋转筒与转动柱,实现了机械手臂本体缓慢转动与较快转动,提高了物品转移过程的安全性,另外,外置了限位机构,保证了机械手臂能够移动,该现有技术在转运过程中会受到很大的重力,容易被转运物品压伤。
技术实现思路
1、针对上述技术问题,本实用新型公开一种车辆装载机械手,包括横移装置,横移装置上装有旋转装置,旋转装置上装有竖板,竖板通过竖移装置带动滑动板上下移动,其特征在于,所述滑动板下侧固定装有固定板,固定板上固定装有电机ⅳ,电机ⅳ转轴上固定装有丝杠ⅲ,固定板上滑动装有滑块ⅱ,滑块ⅱ与丝杠ⅲ配合上下滑动,滑块ⅱ上铰接有转轴,转轴,转轴的两端固定装有滑块ⅲ,滑块ⅲ滑动安装在滑动板上,滑块ⅲ上装有夹持装置。
2、进一步地,所述滑块ⅲ上固定装有套筒,套筒内滑动装有连接板ⅰ,连接板ⅰ上固定装有丝杠ⅳ,套筒上旋转装有齿轮ⅲ,齿轮ⅲ内设置螺纹,齿轮ⅲ旋转带动丝杠ⅳ移动,套筒上固定装有电机ⅴ,电机ⅴ转轴上固定装有齿轮ⅳ,齿轮ⅳ与齿轮ⅲ啮合。
3、进一步地,所述夹持装置包括连接板ⅱ,连接板ⅱ固定安装在所述连接板ⅰ的下侧,连接板ⅱ下侧固定装有两个气缸,气缸缸臂方向相反,气缸的缸臂上固定装有夹取板,夹取板的一侧固定装有弯角套筒,弯角套筒内滑动装有弯板。
4、进一步地,所述夹取板下侧固定装有垫片。
5、进一步地,所述竖移装置包括电机ⅲ,电机ⅲ固定安装在竖板上端,电机ⅲ转轴上固定装有丝杠ⅱ,丝杠ⅱ与滑动板配合并带动滑动板上下移动。
6、进一步地,所述旋转装置包括滑块ⅰ,滑块ⅰ上固定装有电机ⅱ,电机ⅱ转轴上固定装有齿轮ⅱ,齿轮ⅱ一侧配合有齿轮ⅰ,齿轮ⅰ与竖板固定连接,齿轮ⅰ旋转安装在滑块ⅰ上。
7、进一步地,所述横移装置包括横板,横板上固定装有电机ⅰ,电机ⅰ的转轴上固定装有丝杠ⅰ,丝杠ⅰ与滑块ⅰ配合并带动滑块ⅰ横向移动。
8、本实用新型与现有技术相比的有益效果是:(1)本实用新型通过驱动连杆的一端来控制夹持装置前后移动,在此过程中连杆、固定板和滑动板始终保持三角形,使得转运时更加牢固,防止机器意外损坏;(2)本实用新型在套筒上设置连接板ⅰ,连接板ⅰ上设置夹持装置,在转运重量较大方箱时,可以让连杆始终保持在最牢固的支撑位置,通过连接板ⅰ移动带动方箱移动,不仅更加安全,也能增加移动距离;(3)本实用新型在弯角套筒内设置弯板,在码垛时能够通过弯板进行定位,让码垛更加整齐,定位更加精准。
技术特征:
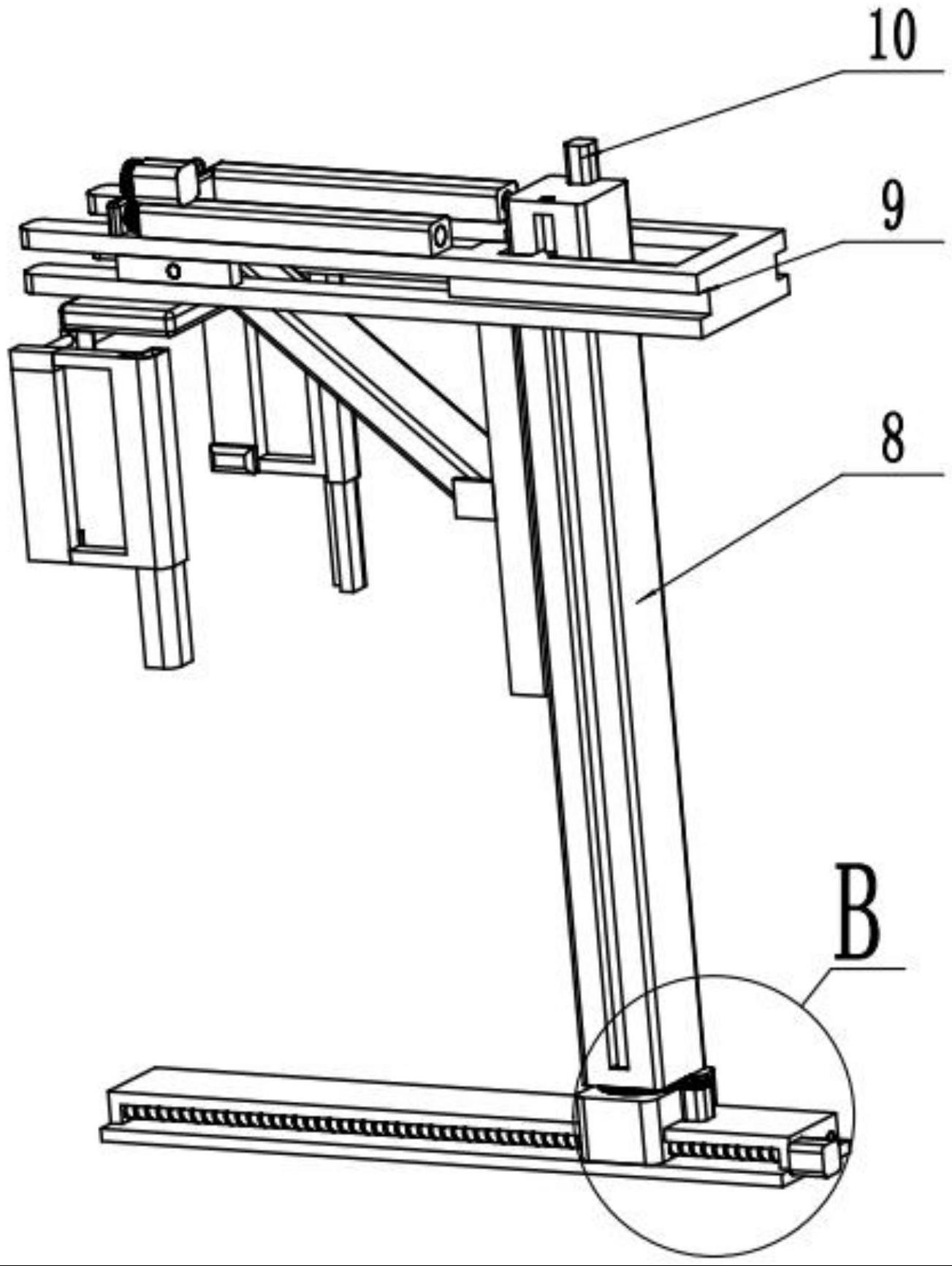
1.一种车辆装载机械手,包括横移装置,横移装置上装有旋转装置,旋转装置上装有竖板(8),竖板(8)通过竖移装置带动滑动板(9)上下移动,其特征在于,所述滑动板(9)下侧固定装有固定板(11),固定板(11)上固定装有电机ⅳ(17),电机ⅳ(17)转轴上固定装有丝杠ⅲ(14),固定板(11)上滑动装有滑块ⅱ(12),滑块ⅱ(12)与丝杠ⅲ(14)配合上下滑动,滑块ⅱ(12)上铰接有转轴(16),转轴(16),转轴(16)的两端固定装有滑块ⅲ(15),滑块ⅲ(15)滑动安装在滑动板(9)上,滑块ⅲ(15)上装有夹持装置。
2.如权利要求1所述的一种车辆装载机械手,其特征在于,所述滑块ⅲ(15)上固定装有套筒(18),套筒(18)内滑动装有连接板ⅰ(19),连接板ⅰ(19)上固定装有丝杠ⅳ(26),套筒(18)上旋转装有齿轮ⅲ(27),齿轮ⅲ(27)内设置螺纹,齿轮ⅲ(27)旋转带动丝杠ⅳ(26)移动,套筒(18)上固定装有电机ⅴ(28),电机ⅴ(28)转轴上固定装有齿轮ⅳ(29),齿轮ⅳ(29)与齿轮ⅲ(27)啮合。
3.如权利要求2所述的一种车辆装载机械手,其特征在于,所述夹持装置包括连接板ⅱ(20),连接板ⅱ(20)固定安装在所述连接板ⅰ(19)的下侧,连接板ⅱ(20)下侧固定装有两个气缸(21),气缸(21)缸臂方向相反,气缸(21)的缸臂上固定装有夹取板(22),夹取板(22)的一侧固定装有弯角套筒(24),弯角套筒(24)内滑动装有弯板(25)。
4.如权利要求3所述的一种车辆装载机械手,其特征在于,所述夹取板(22)下侧固定装有垫片(23)。
5.如权利要求4所述的一种车辆装载机械手,其特征在于,所述竖移装置包括电机ⅲ(10),电机ⅲ(10)固定安装在竖板(8)上端,电机ⅲ(10)转轴上固定装有丝杠ⅱ,丝杠ⅱ与滑动板(9)配合并带动滑动板(9)上下移动。
6.如权利要求5所述的一种车辆装载机械手,其特征在于,所述旋转装置包括滑块ⅰ(4),滑块ⅰ(4)上固定装有电机ⅱ(5),电机ⅱ(5)转轴上固定装有齿轮ⅱ(6),齿轮ⅱ(6)一侧配合有齿轮ⅰ(7),齿轮ⅰ(7)与竖板(8)固定连接,齿轮ⅰ(7)旋转安装在滑块ⅰ(4)上。
7.如权利要求6所述的一种车辆装载机械手,其特征在于,所述横移装置包括横板(1),横板(1)上固定装有电机ⅰ(2),电机ⅰ(2)的转轴上固定装有丝杠ⅰ(3),丝杠ⅰ(3)与滑块ⅰ(4)配合并带动滑块ⅰ(4)横向移动。
技术总结
本技术公开一种车辆装载机械手,涉及机械手领域,包括横移装置,横移装置上装有旋转装置,旋转装置上装有竖板,竖板通过竖移装置带动滑动板上下移动,滑动板通过连杆可驱动夹持装置移动,夹持装置中设置弯板用于定位,本技术通过驱动连杆的一端来控制夹持装置前后移动,在此过程中连杆、固定板和滑动板始终保持三角形,使得转运时更加牢固,防止机器意外损坏。
技术研发人员:刘瑶瑶,陈红迁,陈颖,董和媛,马智萌,袁晶凤,刘志国,崔玉莲
受保护的技术使用者:中国人民解放军陆军装甲兵学院
技术研发日:20230221
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!