一种机械臂组件
本技术涉及机器人,具体而言,涉及一种机械臂组件。
背景技术:
1、机器人在各行各业中越来越多的被人们重视和使用,相比于其他领域,在自动化物流领域中机器人的作用是日益明显的,其中在该领域中机器人的主要形式表现为各种功能的机械臂。
2、现有的机械臂的控制基板采用三轴联动的方式来进行位置控制,但是这种控制方式需要预留出各个运动轴移动时所需要的空间,导致占用空间过大。
技术实现思路
1、本实用新型公开了一种机械臂组件,以改善上述的问题。
2、本实用新型解决上述技术问题所采用的技术方案是:
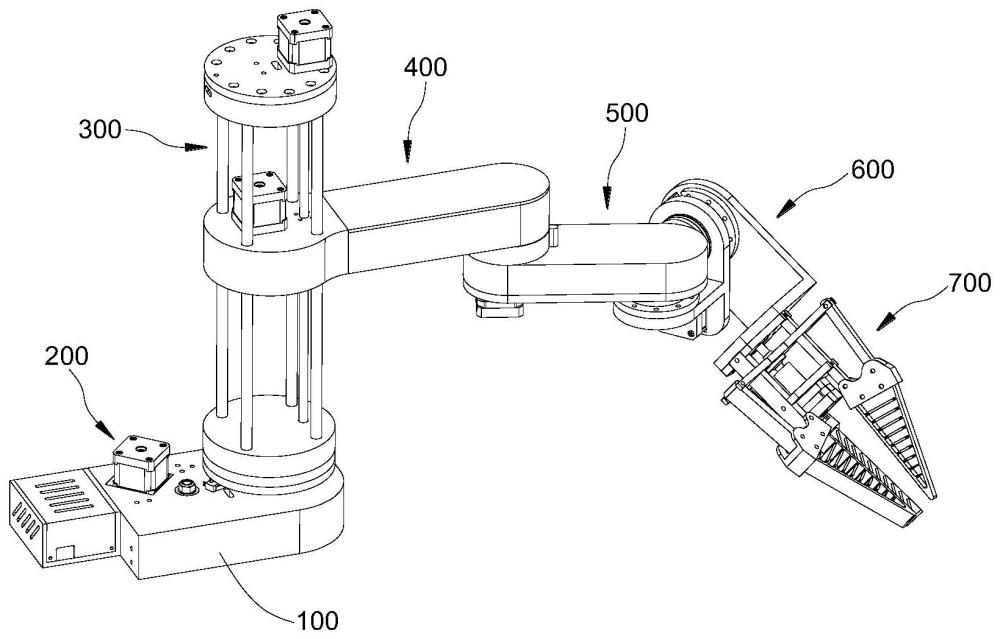
3、基于上述的目的,本实用新型公开了一种机械臂组件,包括:
4、底座;
5、转动组件,所述转动组件与所述底座转动配合;
6、升降组件,所述升降组件安装在所述转动组件上;
7、第一角度调节组件,所述第一角度调节组件安装于所述升降组件的输出端,第一角度调节组件的工作轴线与所述升降组件的升降方向平行;
8、第二角度调节组件,所述第二角度调节组件安装于所述第一角度调节组件的输出端,所述第二角度调节组件的工作方向与所述第一角度调节组件的动作方向垂直;
9、第三角度调节组件,所述第三角度调节组件安装于所述第二角度调节组件的输出端,所述第三角度调节组件的工作方向与所述第二角度调节组件的动作方向垂直;以及
10、机械手,所述机械手安装于所述第三角度调节组件的输出端。
11、可选地:所述转动组件包括:
12、第一电机,所述第一电机安装于所述底座;
13、第一转动座,所述第一转动座与所述底座转动连接,所述第一转动座的转动轴线与所述升降组件的升降方向平行,所述升降组件安装于所述第一转动座;
14、第一传动结构,所述第一传动结构连接于所述第一电机和所述第一转动座之间,以使所述第一电机工作时能够带动所述第一转动座转动。
15、可选地:所述第一传动结构包括第一主动轮、第一从动轮和第一皮带,所述第一主动轮与所述第一电机传动连接,所述第一从动轮安装于所述第一转动座,且所述第一从动轮与所述第一转动座同轴设置,所述第一皮带绕设于所述第一主动轮和所述第一从动轮之间。
16、可选地:所述第一传动结构包括第一主动轮、第一从动轮、中间传动轮和两根第一皮带,所述第一主动轮与所述第一电机传动连接,所述第一从动轮安装于所述第一转动座,且所述第一从动轮与所述第一转动座同轴设置,所述中间传动轮与所述底座转动连接,其中一根所述第一皮带绕设于所述第一主动轮和所述中间传动轮之间,另一根所述第一皮带绕设在所述中间传动轮和所述第一从动轮之间,所述中间传动轮的直径大于所述第一主动轮的直径,所述第一从动轮的直径大于所述中间传动轮的直径。
17、可选地:所述第一转动座上设置有第一触发块,所述转动组件还包括第一触发开关,所述第一触发开关位于所述第一触发块的转动路径上,所述第一触发开关与所述第一电机电连接,当所述第一触发开关被触发时,所述第一电机停止工作。
18、可选地:所述第一触发开关包括第一壳体、第一触发器、第一弹片和第一滚轮,所述第一壳体安装于所述底座,所述第一触发器安装于所述第一壳体,所述第一触发器与所述第一电机电连接,所述第一弹片的一端安装于所述第一壳体,所述第一弹片的另一端朝向所述第一转动座设置,所述第一滚轮安装于所述第一弹片朝向所述第一转动座的一端,所述第一弹片位于所述第一触发块的转动路径上,当所述第一触发块挤压所述第一弹片时,所述第一弹片能够弯曲并触发所述第一触发器。
19、可选地:所述升降组件包括:
20、导向柱,所述导向柱安装于所述第一转动座;
21、安装座,所述安装座安装于所述导向柱背离所述第一转动座的一端;
22、丝杆,所述丝杆的一端与所述第一转动座转动连接,另一端与所述安装座转动连接;
23、升降电机,所述升降电机安装于所述安装座,且所述升降电机与所述丝杆传动连接;以及
24、升降座,所述升降座与所述导向柱滑动连接,且所述升降座与所述丝杆螺纹连接,所述第一角度调节组件安装于所述升降座。
25、可选地:所述机械手包括:
26、连接座,所述连接座与所述第三角度调节组件连接,所述连接座上设置有至少两根第一连接杆,至少两根所述第一连接杆沿所述连接座的周向均匀设置;
27、滑动座,所述滑动座与所述连接座滑动配合;
28、多根第二连接杆,所述第二连接杆的数量与所述第一连接杆的数量一致,且多根第二连接杆与所述至少两根第一连接杆一一对应设置,所述第二连接杆与所述滑动座转动连接;
29、多个机械爪,所述机械爪的数量与所述第一连接杆的数量一致,且多个机械爪与所述至少两根第一连接杆一一对应设置,所述机械爪的第一侧与所述第一连接杆转动连接,所述机械爪的第二侧与所述第二连接杆转动连接;以及
30、推杆电机,所述推杆电机安装于所述连接座,且所述推杆电机的输出端与所述滑动座连接。
31、可选地:所述滑动座上设置有多个通孔,多个所述通孔与所述至少两根第一连接杆一一对应设置,所述第一连接杆位于所述通孔内,且所述滑动座与所述第一连接杆滑动配合。
32、可选地:所述连接座上设置有三根所述第一连接杆。
33、与现有技术相比,本实用新型实现的有益效果是:
34、本实用新型公开的机械臂组件通过转动组件、第一角度调节组件和第二角度调节的配合能够将机械手移动至各个位置,能够做到令机械手沿直线在水平方向上移动,且这种方式占用空间小,其在较小空间内也能完成各个动作指令,利用第三角度调节组件对机械手的角度进行控制能够令机械臂组件更加灵活。
技术特征:
1.一种机械臂组件,其特征在于,包括:
2.根据权利要求1所述的机械臂组件,其特征在于,所述转动组件包括:
3.根据权利要求2所述的机械臂组件,其特征在于,所述第一传动结构包括第一主动轮、第一从动轮和第一皮带,所述第一主动轮与所述第一电机传动连接,所述第一从动轮安装于所述第一转动座,且所述第一从动轮与所述第一转动座同轴设置,所述第一皮带绕设于所述第一主动轮和所述第一从动轮之间。
4.根据权利要求2所述的机械臂组件,其特征在于,所述第一传动结构包括第一主动轮、第一从动轮、中间传动轮和两根第一皮带,所述第一主动轮与所述第一电机传动连接,所述第一从动轮安装于所述第一转动座,且所述第一从动轮与所述第一转动座同轴设置,所述中间传动轮与所述底座转动连接,其中一根所述第一皮带绕设于所述第一主动轮和所述中间传动轮之间,另一根所述第一皮带绕设在所述中间传动轮和所述第一从动轮之间,所述中间传动轮的直径大于所述第一主动轮的直径,所述第一从动轮的直径大于所述中间传动轮的直径。
5.根据权利要求3或者4所述的机械臂组件,其特征在于,所述第一转动座上设置有第一触发块,所述转动组件还包括第一触发开关,所述第一触发开关位于所述第一触发块的转动路径上,所述第一触发开关与所述第一电机电连接,当所述第一触发开关被触发时,所述第一电机停止工作。
6.根据权利要求5所述的机械臂组件,其特征在于,所述第一触发开关包括第一壳体、第一触发器、第一弹片和第一滚轮,所述第一壳体安装于所述底座,所述第一触发器安装于所述第一壳体,所述第一触发器与所述第一电机电连接,所述第一弹片的一端安装于所述第一壳体,所述第一弹片的另一端朝向所述第一转动座设置,所述第一滚轮安装于所述第一弹片朝向所述第一转动座的一端,所述第一弹片位于所述第一触发块的转动路径上,当所述第一触发块挤压所述第一弹片时,所述第一弹片能够弯曲并触发所述第一触发器。
7.根据权利要求2所述的机械臂组件,其特征在于,所述升降组件包括:
8.根据权利要求1所述的机械臂组件,其特征在于,所述机械手包括:
9.根据权利要求8所述的机械臂组件,其特征在于,所述滑动座上设置有多个通孔,多个所述通孔与所述至少两根第一连接杆一一对应设置,所述第一连接杆位于所述通孔内,且所述滑动座与所述第一连接杆滑动配合。
10.根据权利要求8所述的机械臂组件,其特征在于,所述连接座上设置有三根所述第一连接杆。
技术总结
本申请公开了一种机械臂组件,属于机器人技术领域,其包括底座、转动组件、升降组件、第一角度调节组件、第二角度调节组件、第三角度调节组件以及机械手。转动组件安装在底座上,用于带动升降组件转动,升降组件用于控制第一角度调节组件的高度,第一角度调节组件和第二角度调节组件用于与转动组件配合以调节机械手在水平上的位置,第三角度调节组件的工作方向沿水平方向设置,其用于调节机械手的角度。本技术公开的机械臂组件通过转动组件、第一角度调节组件和第二角度调节的配合能够将机械手移动至各个位置,且这种方式占用空间小,其在较小空间内也能完成各个动作指令。
技术研发人员:杨欣,来升,邹应辉,陈志林,窦静,张小龙,向张杰
受保护的技术使用者:四川轻化工大学
技术研发日:20230223
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!