一种汽车夹具机械手的制作方法
本技术属于机械手领域,尤其涉及一种汽车夹具机械手。
背景技术:
1、随着汽车工业和零部件工业的发展,汽车装配线技术水平也有了较大的提高,国内对直接影响汽车产品质量及使用寿命的汽车产品生产最后环节的装配及出厂试验日趋重视,促进了汽车产品装配、试验工艺及装备技术水平的提高,目前在汽车组装的过程中,对于汽车零件的搬运依靠夹具和机械手的配合,以减少成本。
2、在中国实用新型专利cn208826626u中公开的汽车夹具机械手,包括两个底座,所述底座的顶部焊接有支撑块,所述支撑块的顶部焊接有支撑杆,两个支撑杆的顶部焊接有同一个连接块,虽然该实用新型通过滑杆和滑孔的配合,使机械手本体能够直上直下的运动,通过底座、支撑块、支撑杆和连接块的配合,可以使两个底座同时运动,使搬运时更加稳定,但是该装置的底座和连接块的体积较大,而机械手本体只能竖直上下运动,当需要将汽车零件运送到某个空间狭小的地方时,该装置无法进入,进而导致只能将汽车零件搬运到目的地附近,不便于使用。
3、为避免上述技术问题,确有必要提供一种汽车夹具机械手以克服现有技术中的所述缺陷。
技术实现思路
1、本实用新型实施例的目的在于提供一种汽车夹具机械手,旨在解决上述背景技术中提到的问题。
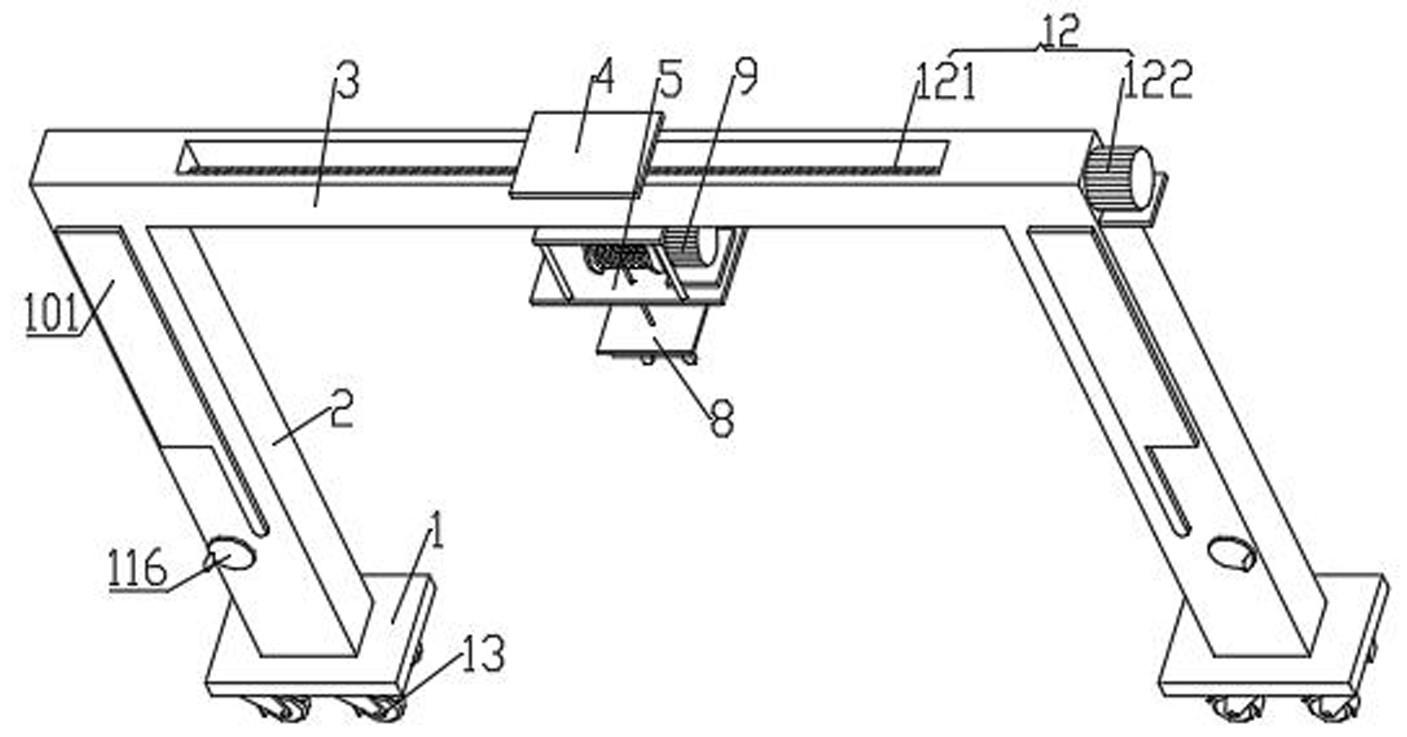
2、本实用新型实施例是这样实现的,一种汽车夹具机械手,包括两个底板,两个所述底板上均固定连接有立柱,两个所述立柱的顶部之间固定连接有横杆,所述横杆上滑动连接有滑块,横杆上开设有与滑块相适配的滑槽,所述滑块的底部固定连接有安装架,所述安装架上转动连接有卷线盘,所述卷线盘上缠绕有钢丝绳,所述钢丝绳贯穿安装架的一端固定连接有机械手本体,所述安装架上还固定安装有第一电动机,所述第一电动机的输出轴与卷线盘的一端固定连接,还包括:
3、限位机构,所述限位机构转动连接在立柱上,所述限位机构用于对机械手本体抓取的零件进行限位;
4、控制机构,所述控制机构连接在立柱上,且控制机构与限位机构传动连接,控制机构通过带动限位机构转动的方式控制限位机构的打开和关闭;
5、驱动机构,所述驱动机构连接在横杆上,所述驱动机构与滑块传动连接,驱动机构用于带动滑块水平移动。
6、进一步的技术方案,所述限位机构包括一个转动轴和两个限位板,所述转动轴转动连接在立柱上,两个所述限位板分别固定连接在转动轴伸出立柱的两端。
7、进一步的技术方案,所述控制机构包括转动杆,所述立柱的内部开设有空腔,所述转动轴位于空腔的内部,所述转动杆转动连接在空腔的侧壁上,且转动杆的一端固定连接有第一锥形齿轮,所述转动轴上固定连接有第二锥形齿轮,所述第一锥形齿轮和第二锥形齿轮啮合连接,所述转动杆上还固定连接有蜗轮,所述空腔的内部转动连接有蜗杆,所述蜗杆和蜗轮啮合连接,所述蜗杆伸出立柱的一端固定连接有手轮。
8、进一步的技术方案,所述限位机构和控制机构的数量均为两个,两个所述限位机构和两个所述控制机构均关于横杆的中线对称分布。
9、进一步的技术方案,所述驱动机构包括转动连接在横杆上的螺杆,所述螺杆与滑块螺纹连接,所述横杆的一端固定安装有第二电动机,所述第二电动机的输出轴与螺杆的一端固定连接。
10、进一步的技术方案,两个所述底板的底部均设置有万向轮。
11、相较于现有技术,本实用新型的有益效果如下:
12、本实用新型实施例提供的一种汽车夹具机械手,通过设置第一电动机、卷线盘、钢丝绳和机械手本体,通过将零件夹持在机械手本体上,使零件可以方便地移动,放置时,可以一边推动零件移动,一边放钢丝绳,使零件准确停留在合适的位置,该装置使用更方便;通过设置限位板、转动轴以及控制机构,在零件被抓取后,控制机构带动限位板对零件进行限位,避免零件在装置移动过程中随意晃动,保证了作业安全。
技术特征:
1.一种汽车夹具机械手,包括两个底板,两个所述底板上均固定连接有立柱,两个所述立柱的顶部之间固定连接有横杆,其特征在于,所述横杆上滑动连接有滑块,所述滑块的底部固定连接有安装架,所述安装架上转动连接有卷线盘,所述卷线盘上缠绕有钢丝绳,所述钢丝绳贯穿安装架的一端固定连接有机械手本体,所述安装架上还固定安装有第一电动机,所述第一电动机的输出轴与卷线盘的一端固定连接,还包括:
2.根据权利要求1所述的汽车夹具机械手,其特征在于,所述控制机构包括转动杆,所述立柱的内部开设有空腔,所述转动轴位于空腔的内部,所述转动杆转动连接在空腔的侧壁上,且转动杆的一端固定连接有第一锥形齿轮,所述转动轴上固定连接有第二锥形齿轮,所述第一锥形齿轮和第二锥形齿轮啮合连接,所述转动杆上还固定连接有蜗轮,所述空腔的内部转动连接有蜗杆,所述蜗杆和蜗轮啮合连接。
3.根据权利要求2所述的汽车夹具机械手,其特征在于,所述限位机构和控制机构的数量均为两个,两个所述限位机构和两个所述控制机构均关于横杆的中线对称分布。
4.根据权利要求1所述的汽车夹具机械手,其特征在于,所述驱动机构包括转动连接在横杆上的螺杆,所述螺杆与滑块螺纹连接,所述横杆的一端固定安装有第二电动机,所述第二电动机的输出轴与螺杆的一端固定连接。
5.根据权利要求1所述的汽车夹具机械手,其特征在于,两个所述底板的底部均设置有万向轮。
技术总结
本技术适用于机械手领域,提供了一种汽车夹具机械手,包括两个底板,两个所述底板上均固定连接有立柱,两个所述立柱的顶部之间固定连接有横杆,所述横杆上滑动连接有滑块,横杆上开设有与滑块相适配的滑槽,所述滑块的底部固定连接有安装架,所述安装架上转动连接有卷线盘。本技术通过设置第一电动机、卷线盘、钢丝绳和机械手本体,放置零件时,可以一边推动零件移动,一边放钢丝绳,使零件准确停留在合适的位置,该装置使用更方便;通过设置限位板、转动轴以及控制机构,在零件被抓取后,控制机构带动限位板对零件进行限位,避免零件在装置移动过程中随意晃动,保证了作业安全。
技术研发人员:彭焕伟,范晓明
受保护的技术使用者:长春市众诚智能科技有限公司
技术研发日:20230307
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!