一种水池机器人的制作方法
本技术涉及水池工作机器人,尤其涉及一种水池机器人。
背景技术:
1、水池机器人作为一种水池内自动工作的智能设备,广受人们青睐。
2、现有技术中,水池机器人包括驱动机构和壳体,驱动机构设置在壳体的下端,以便于驱动水池机器人在水池中行走。工作时,水池机器人受浮力作用,导致其在水池底面行走稳定性较弱。同时,由于水池底面可能存在台阶等障碍等情况。如果水池机器人遇到台阶,由于行走机构不能识别台阶也不能越过台阶,水池机器人通过转弯避让台阶位置,导致台阶的上端面和侧壁无法处理。如果水池机器人遇到其余的障碍物,或者障碍物较多时,水池机器人无法转弯时,可能发生卡死现象。
3、为解决上述问题,亟待提供一种水池机器人,解决以上问题。
技术实现思路
1、本实用新型的目的是提出一种水池机器人,以达到提高水池机器人在水池底面行走的稳定性,自动完成在水池中翻越台阶、越障或者在竖直壁面上行走,有利于扩大水池机器人的适用范围的效果。
2、为达此目的,本实用新型采用以下技术方案:
3、一种水池机器人,包括:
4、壳体;
5、行走机构,设置在所述壳体的底部;
6、排液机构,设置在所述壳体上,所述排液机构用于将所述壳体中的液体排出,所述排液机构包括调节组件,所述调节组件上设有排液口,所述排液口朝向所述壳体的后部设置,所述调节组件被配置为调节所述排液口的喷液角度。
7、作为一种可选方案,所述排液机构还包括:
8、排液驱动组件,所述排液驱动组件上设有导向口,所述排液驱动组件被配置为驱动液体沿预设路径从所述导向口排出。
9、作为一种可选方案,所述调节组件包括:
10、调节驱动件,设置在所述壳体上;
11、连杆,与所述调节驱动件的输出端连接;以及
12、调节端盖,设置在所述连杆上,所述排液口设置在所述调节端盖上,所述调节端盖罩设在所述排液驱动组件的导向口上,所述调节驱动件被配置为驱动所述连杆摆动,以在预设范围内调节所述喷液角度。
13、作为一种可选方案,所述调节端盖包括:
14、调节壁,所述排液口设置在调节壁上,所述排液口为沿所述壳体前后方向延伸的腰型孔。
15、作为一种可选方案,所述连杆包括:
16、驱动杆,与所述调节驱动件的输出端连接;以及
17、连接杆,所述连接杆的一端与所述驱动杆连接,所述连接杆的另一端与所述调节端盖连接,所述连接杆和所述驱动杆中的一者设有条形孔,所述驱动杆与所述连接杆通过所述条形孔铰接。
18、作为一种可选方案,所述壳体内设有安装所述排液机构的安装区域,所述安装区域的侧壁上设有连通孔,所述排液机构用于将通过所述连通孔流入安装区域中的液体排出,所述排液驱动组件包括:
19、导向筒,所述导向筒设置在所述安装区域中,且所述导向筒靠近所述安装区域底部的一端与所述安装区域的底部留有间隙,所述导向筒远离所述安装区域的一端设有所述导向口;以及
20、叶轮,设置在所述安装区域中,且所述叶轮位于所述导向筒中,所述叶轮被配置为驱动液体从所述导向筒的外部进入所述导向筒中,并从所述导向口排出。
21、作为一种可选方案,所述排液驱动组件还包括:
22、转轴,设置在所述导向筒上,所述调节组件上设有轴孔,所述转轴穿过所述轴孔设置。
23、作为一种可选方案,所述导向筒包括:
24、第一导向部,沿所述壳体的高度方向设置,且所述叶轮至少部分位于所述第一导向部中;以及
25、第二导向部,与所述第一导向部连接,并朝向所述壳体的后部倾斜预设角度,所述第二导向部远离所述第一导向部的一端设有所述导向口,所述调节组件的调节端盖套设在所述第二导向部上。
26、作为一种可选方案,所述第二导向部包括:
27、本体;
28、波纹筋,沿所述本体的周向设置在所述本体的外周,所述波纹筋被配置为与所述调节端盖的内壁相配合设置。
29、作为一种可选方案,所述波纹筋为多组,多个所述波纹筋沿所述本体的轴向方向间隔设置,且沿靠近所述调节端盖的方向,所述波纹筋的高度逐渐减小,以使所述调节端盖转动时,至少有一组所述波纹筋与所述调节端盖间隙配合。
30、作为一种可选方案,还包括控制系统,所述控制系统用于控制所述调节组件。
31、作为一种可选方案,所述水池机器人在水池的底面行走时,所述排液口的喷液角度与后方的夹角为75°~90°,所述水池机器人的前方遇到障碍或爬坡时,所述排液口的喷液角度与后方的夹角为0°~15°,以使所述水池机器人从水平方向行走切换为竖直方向爬升或爬坡行走,当所述水池机器人在竖直壁面行走时,所述排液口的喷液角度与后方的夹角为15°~75°。
32、本实用新型的有益效果为:
33、本实用新型提供一种水池机器人,该水池机器人包括壳体、行走机构及排液机构。行走机构设置在壳体的底部,排液机构设置在壳体上,排液机构用于将壳体中的液体排出,排液机构包括调节组件,调节组件上设有排液口,排液口朝向壳体的后部设置,调节组件能够调节排液口的喷液角度。该水池机器人通过调节喷液角度,能够辅助实现水池机器人翻越台阶、越障或者在竖直壁面上行走,有利于扩大水池机器人的适用范围。同时,对于清洁水池的水池机器人,还有利于扩大水池机器人的清洁范围,提高清洁效果。
技术特征:
1.一种水池机器人,其特征在于,包括:
2.根据权利要求1所述的水池机器人,其特征在于,所述排液机构(300)还包括:
3.根据权利要求2所述的水池机器人,其特征在于,所述调节组件(310)包括:
4.根据权利要求3所述的水池机器人,其特征在于,所述调节端盖(313)包括:
5.根据权利要求3所述的水池机器人,其特征在于,所述连杆(312)包括:
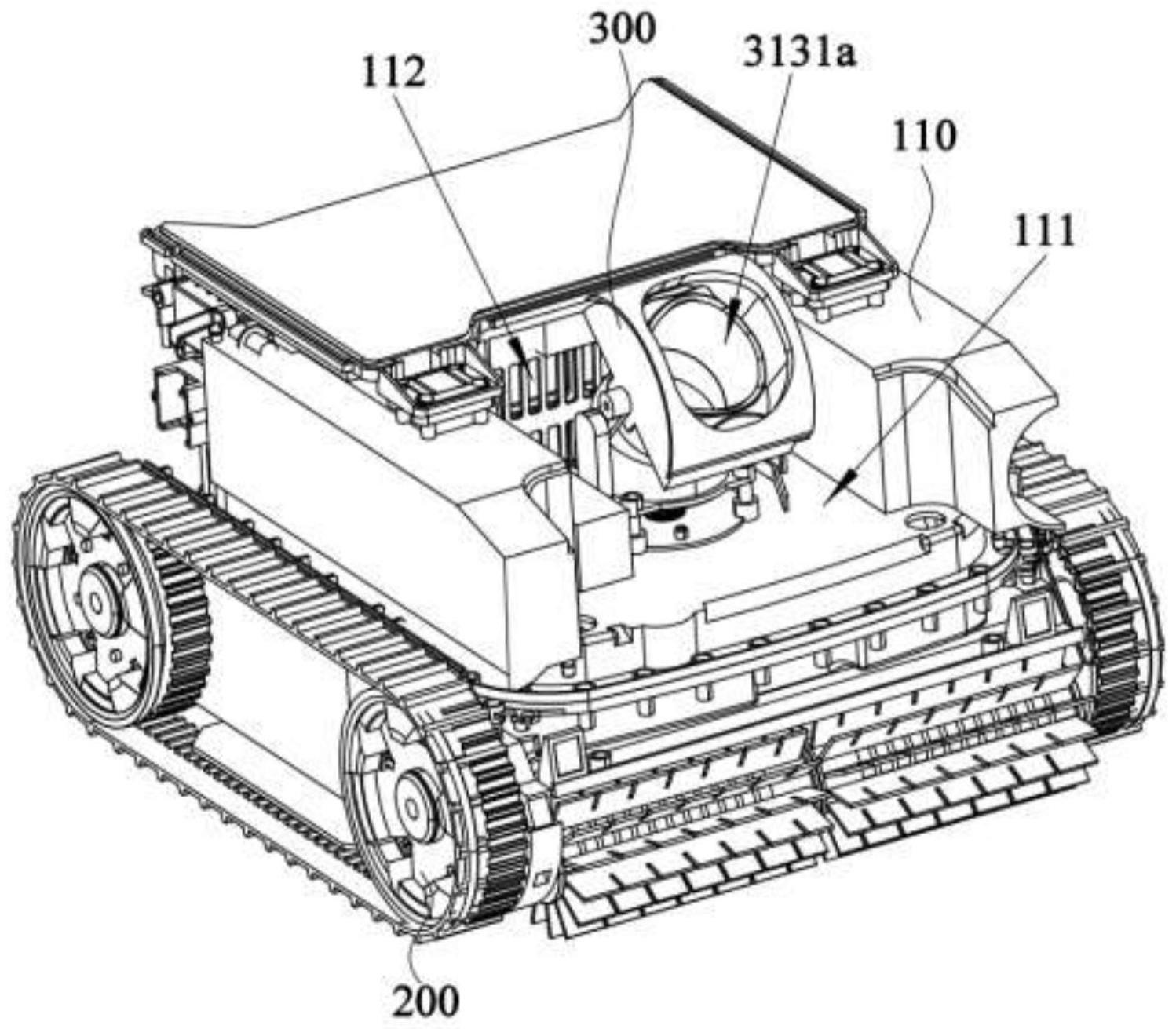
6.根据权利要求2所述的水池机器人,其特征在于,所述壳体(100)内设有安装所述排液机构(300)的安装区域(111),所述安装区域(111)的侧壁上设有连通孔(112),所述排液机构(300)用于将通过所述连通孔(112)流入安装区域中的液体排出,所述排液驱动组件(320)包括:
7.根据权利要求6所述的水池机器人,其特征在于,所述排液驱动组件(320)还包括:
8.根据权利要求7所述的水池机器人,其特征在于,所述导向筒(322)包括:
9.根据权利要求8所述的水池机器人,其特征在于,所述第二导向部(3222)包括:
10.根据权利要求9所述的水池机器人,其特征在于,所述波纹筋(3222c)为多组,多个所述波纹筋(3222c)沿所述本体(3222b)的轴向方向间隔设置,且沿靠近所述调节端盖(313)的方向,所述波纹筋(3222c)的高度逐渐减小,以使所述调节端盖(313)转动时,至少有一组所述波纹筋(3222c)与所述调节端盖(313)间隙配合。
11.根据权利要求1-10任一项所述的水池机器人,其特征在于,还包括控制系统,所述控制系统用于控制所述调节组件。
12.根据权利要求1-10任一项所述的水池机器人,其特征在于,所述水池机器人在水池的底面行走时,所述排液口(3131a)的喷液角度与后方的夹角为75°~90°,所述水池机器人的前方遇到障碍或爬坡时,所述排液口(3131a)的喷液角度与后方的夹角为0°~15°,以使所述水池机器人从水平方向行走切换为竖直方向爬升或爬坡行走,当所述水池机器人在竖直壁面行走时,所述排液口(3131a)的喷液角度与后方的夹角为15°~75°。
技术总结
本技术涉及水池工作机器人技术领域,尤其涉及一种水池机器人。本技术提供一种水池机器人,该水池机器人包括壳体、行走机构及排液机构。行走机构设置在壳体的底部,排液机构设置在壳体上,排液机构用于将壳体中的液体排出,排液机构包括调节组件,调节组件上设有排液口,排液口朝向壳体的后部设置,调节组件能够调节排液口的喷液角度。该水池机器人通过调节喷液角度,能够辅助实现水池机器人翻越台阶、越障或者在竖直壁面上行走,有利于扩大水池机器人的适用范围。同时,对于清洁水池的水池机器人,还有利于扩大水池机器人的清洁范围,提高清洁效果。
技术研发人员:张石磊
受保护的技术使用者:星迈创新科技(苏州)有限公司
技术研发日:20230308
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!