一种机器人手爪的制作方法
本技术涉及一种抓手,具体涉及一种机器人手爪。
背景技术:
1、目前,国内外机械加工行业正在进行大规模的自动化、智能化升级改造。在自动化产线中,机器人抓取零件进行上下料代替了原有的人工搬运零件,成为了普遍现象。
2、机器人在自动化产线中的应用,催生了大量非标工装和机构的设计应用,其中,机器人手爪是应用范围最广的非标工装。自动化产线中,很多大型壳体类零件都具有法兰面结构,例如:离合器壳体、变矩器壳体、发动机壳体等。这种特征明显的壳体类零件的自动化生产,要确保机器人手爪适用于大型壳体类零件,要保证机器人手爪抓取零件的部位在外侧,避免与加工设备干涉;还需要保证手爪抓取的可靠性。
3、目前,涉及离合器壳体、变矩器壳体、发动机壳体等的自动化产线中,缺少能够安全可靠抓取大型壳体类零件的机器人手爪。
4、公开号为cn103029127a的中国发明专利,公开了一种机器人手爪,该手爪动态调节定位精度,但是其装置复杂,且精度的观测手段单一,极易出现问题。
技术实现思路
1、本实用新型提供了一种机器人手爪,用于解决现有机器人的手爪不适合抓取大型壳体类零件,以及在抓取过程中精度低的问题。
2、为实现上述目的,本实用新型的技术方案如下:
3、一种机器人手爪,其特殊之处在于,包括底板以及安装在底板上的用于与机器人连接的快换组件、定位组件、以及用于抓取零件的多个气动杠杆缸、与气动杠杆缸一一对应的多个松开到位传感器和夹紧到位传感器;
4、多个所述气动杠杆缸周向均匀的安装在所述底板的下表面;多个所述气动杠杆缸的输出端用于卡紧待抓取零件;
5、多个所述夹紧松开传感器支架安装在底板的上表面,且和所述气动杠杆缸一一对应;
6、每个所述夹紧松开传感器支架上的侧面均安装有一个松开到位传感器和一个夹紧到位传感器;
7、每个所述气动杠杆缸的输出端还连接有杠杆缸底部接长杆,杠杆缸底部接长杆的一端穿过底板靠近松开到位传感器和一个夹紧到位传感器设置,所述气动杠杆缸用于驱动杠杆缸底部接长杆上下移动,进而触发夹紧到位传感器和松开到位传感器;
8、所述定位组件用于与待抓取零件表面的零件定位孔连接。
9、进一步地,还包括多个定位杆和定位杆检测组件;
10、所述定位杆安装在底板的下表面,多个定位杆一一对应设置在多个所述气动杠杆缸的内侧;定位杆的下端面用于与待抓取零件接触;
11、所述定位杆检测组件包括贴合到位传感器和贴合到位传感器支架,所述贴合到位传感器支架安装在底板下表面,所述贴合到位传感器安装在贴合到位传感器支架上,用于检测定位杆是否与零件表面贴合到位。
12、进一步地,所述快换组件包括快换接头和快换接头底座,所述快换接头底座安装在底板的上表面,所述快换接头安装在快换接头底座上,所述快换接头用于与机器人连接。
13、进一步地,还包括激光扫描组件,所述激光扫描组件包括激光扫描仪和激光扫描仪支架;
14、所述激光扫描仪支架固定安装在底板的一侧,所述激光扫描仪通过螺钉固定在激光扫描仪支架上,用于扫描定位待抓取零件。
15、进一步地,所述伸缩杆组件包括压钉、挡片、弹簧、伸缩杆底座以及伸缩杆;
16、所述伸缩杆底座安装在底板上,伸缩杆底座上设置有中心孔,伸缩杆的下端从底板的上端穿过中心孔至底板的下端,伸缩杆上端的直径大于中心孔的直径;
17、所述弹簧套装在伸缩杆下端,且弹簧的上端与伸缩杆底座的下表面接触,所述挡片套装在伸缩杆上且与弹簧的下端相贴,所述压钉通过螺纹配合安装在伸缩杆的下端;压钉的下端面用于与待抓取零件的表面接触;
18、所述伸缩杆检测组件包括伸缩杆传感器和伸缩杆传感器支架;
19、所述伸缩杆传感器支架安装在底板的上表面,且伸缩杆传感器支架靠近所述伸缩杆底座设置,所述伸缩杆传感器安装在伸缩杆传感器支架上,用于检测伸缩杆上端的位置。
20、进一步地,所述定位组件包括圆柱定位销、菱形定位销以及两个定位销底座;
21、两个所述定位销底座均安装在底板下表面上,所述圆柱定位销和菱形定位销分别各安装在两个定位销底座上;所述圆柱定位销、菱形定位销分别用于与待抓取零件表面的零件定位孔连接。
22、进一步地,还包括与气动杠杆缸一一对应的杠杆缸底座,多个所述气动杠杆缸通过一一对应的杠杆缸底座周向均匀的安装在所述底板的下表面。
23、进一步地,所述气动杠杆缸为八个。
24、与现有技术相比,本实用新型的有益效果如下:
25、(1)本实用新型中,通过多个气动杠杆缸能够抓取零件,并且通过松开到位传感器和夹紧到位传感器能够间接地知道气动杠杆缸是否在抓取零件,使得工作人员能够精确的判断该手爪工作是否正常。
26、(2)本实用新型中通过定位杆和贴合到位传感器,能够确保气动杠杆缸精确地抓取零件,保证手爪抓取零件的可靠性。
27、(3)本实用新型中通过设置的快换接头,使得手爪能够适应多种机器人。
28、(4)本实用新型中通过激光扫描仪扫描待抓取零件,明确抓取位置,保证手爪抓取零件的可靠性。
29、(5)本实用新型中通过伸缩杆和伸缩杆传感器,能够反映出气动杠杆缸夹持零件的状态,确保手爪安全运行。
技术特征:
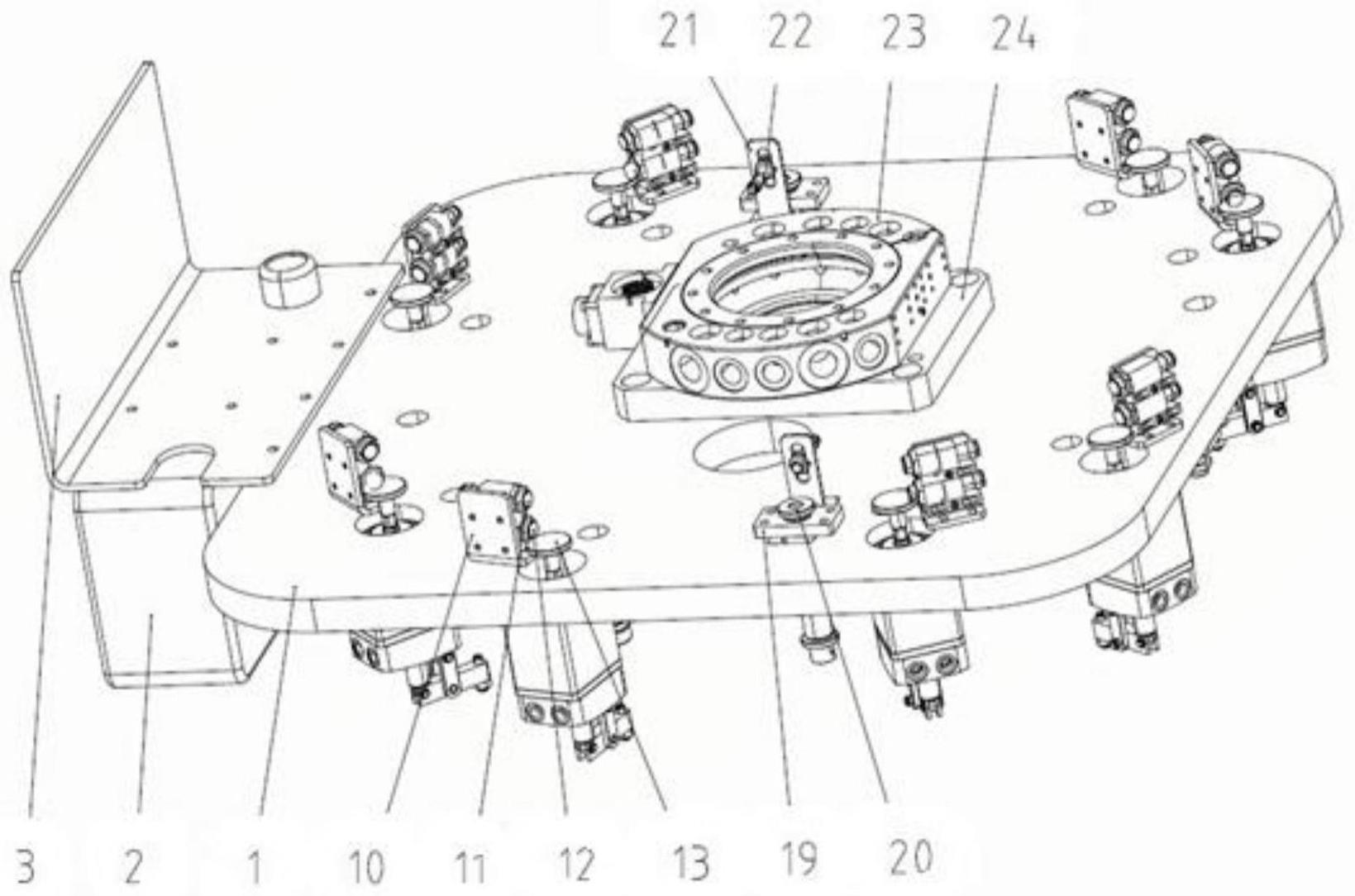
1.一种机器人手爪,其特征在于,包括底板(1)以及安装在底板(1)上的用于与机器人连接的快换组件、定位组件、以及用于抓取零件的多个气动杠杆缸(8)、与气动杠杆缸(8)一一对应的多个松开到位传感器(11)、夹紧松开传感器支架(10)和夹紧到位传感器(12);
2.根据权利要求1所述的一种机器人手爪,其特征在于:还包括多个定位杆(7)和定位杆检测组件;
3.根据权利要求2所述的一种机器人手爪,其特征在于:所述快换组件包括快换接头(23)和快换接头底座(24),所述快换接头底座(24)安装在底板(1)的上表面,所述快换接头(23)安装在快换接头底座(24)上,所述快换接头(23)用于与机器人连接。
4.根据权利要求3所述的一种机器人手爪,其特征在于:还包括激光扫描组件,所述激光扫描组件包括激光扫描仪(2)和激光扫描仪支架(3);
5.根据权利要求4所述的一种机器人手爪,其特征在于:还包括伸缩杆组件和伸缩杆检测组件;
6.根据权利要求1-5任一所述的一种机器人手爪,其特征在于:所述定位组件包括圆柱定位销(4)、菱形定位销(5)以及两个定位销底座(6);
7.根据权利要求6所述的一种机器人手爪,其特征在于:还包括与气动杠杆缸(8)一一对应的杠杆缸底座(9),多个所述气动杠杆缸(8)通过一一对应的杠杆缸底座(9)周向均匀的安装在所述底板(1)的下表面。
8.根据权利要求7所述的一种机器人手爪,其特征在于:所述气动杠杆缸(8)为八个。
技术总结
本技术具体涉及一种机器人手爪,解决了现有机器人的手爪不适合抓取大型壳体类零件的问题。本技术包括底板以及安装在底板上的快换组件、激光扫描组件、伸缩杆组件、伸缩杆检测组件、定位组件和多个气动杠杆缸、与气动杠杆缸一一对应的夹紧松开传感器支架、与气动杠杆缸一一对应的杠杆缸底座;多个气动杠杆缸通过一一对应的杠杆缸底座周向均匀的安装在底板的下表面;多个夹紧松开传感器支架安装在底板的上表面,且和气动杠杆缸一一对应;每个夹紧松开传感器支架上的侧面均安装有松开到位传感器和夹紧到位传感器;每个气动杠杆缸的底部安装有一个杠杆缸底部接长杆。
技术研发人员:张毅,杨国华,杨明剑
受保护的技术使用者:西安法士特汽车传动有限公司
技术研发日:20230310
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!