一种同步夹爪机械手的制作方法
本技术涉及机械手,特别是涉及一种同步夹爪机械手。
背景技术:
1、随着工业化和自动化的发展,夹爪机械手各行各业得到大量应用。特别是在产品的生产线上,通过夹爪机械手可以高效地完成产品物料的抓取、搬运、转移、分拣等,能够有效地提高产线的生产效率。
2、然而,在新能源电池生产领域,采用简单的移植方式,将传统的夹爪机械手移植到生产线的方式往往事倍功半,其虽然能完成物料的抓取、搬运、转移、分拣等功能,但是效率较低,且在夹取过程存在着对电池产品损伤的风险,为此通常需要对传统的夹爪机械手进行改进,以适应生产线的需要。
技术实现思路
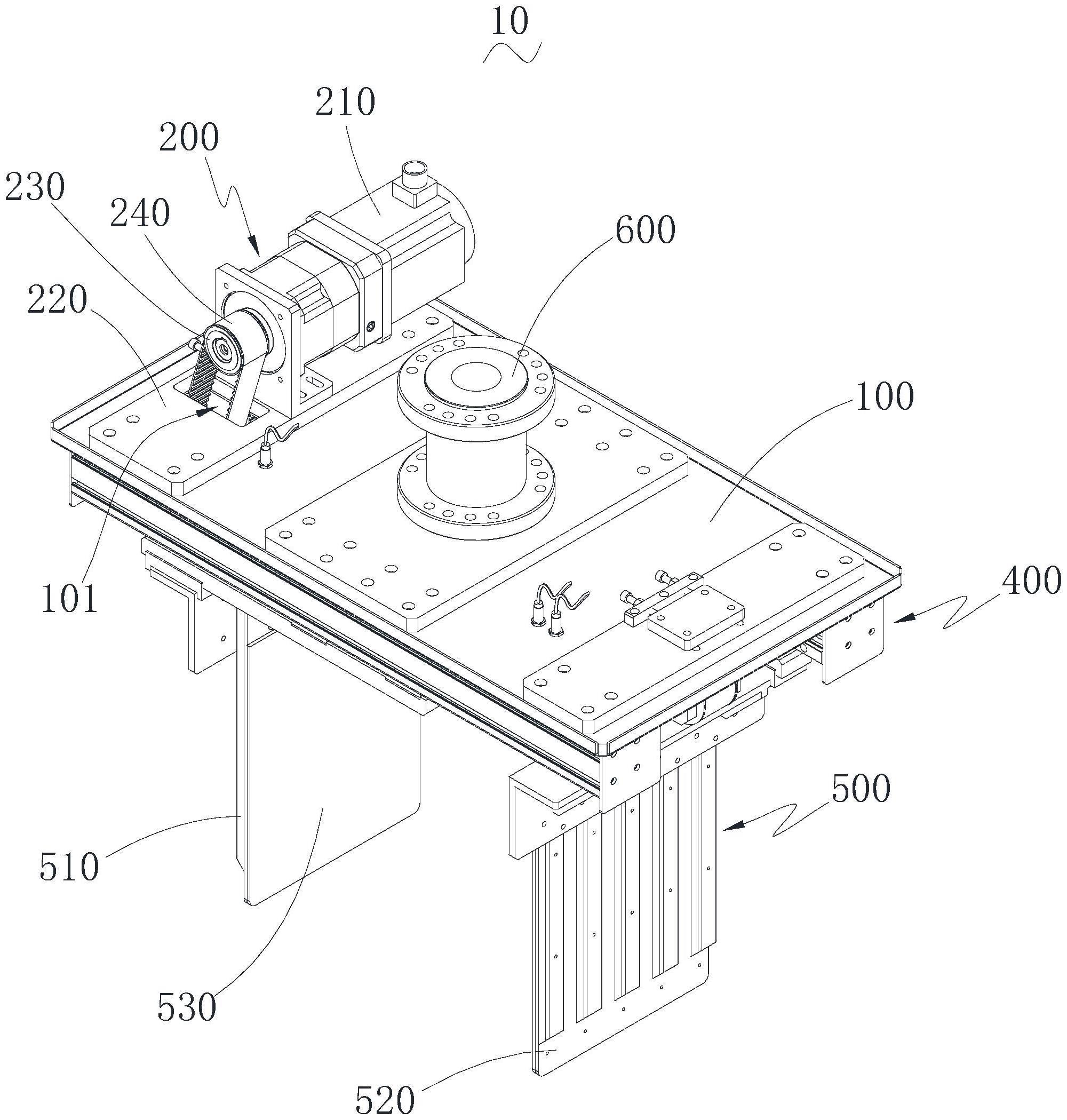
1、基于此,有必要针对如何提高产品的适应性,提高产线效率的技术问题,提供一种同步夹爪机械手,该同步夹爪机械手包括:支撑板、电机组件、皮带组件、导轨组件以及夹爪组件,所述电机组件安装固定在所述支撑板的表面,所述皮带组件以及所述导轨组件背向所述电机组件安装固定在所述支撑板的背面,所述夹爪组件滑动安装在所述导轨组件上并与所述皮带组件连接,所述电机组件通过所述皮带组件驱动所述夹爪组件,以完成对产品物料的夹取;
2、所述导轨组件包括前导轨以及后导轨,所述前导轨以及所述后导轨分别安装固定在所述支撑板背面的前后两侧边,所述前导轨的朝向所述后导轨的内侧面设置有第一前滑轨,所述前导轨的底面设置有第二前滑轨,
3、所述后导轨的朝向所述前导轨的内侧面对应所述第一前滑轨设置有第一后滑轨,所述后导轨的底面设置有第二后滑轨;
4、所述夹爪组件包括左夹板以及右夹板,所述左夹板以及所述右夹板分别位于所述支撑板背面的左右两端,
5、所述左夹板设置有左内侧面滑块以及左底面滑块,所述左内侧面滑块与所述第一后滑轨滑动连接,所述左底面滑块与所述第二前滑轨滑动连接,
6、所述右夹板设置有右内侧面滑块以及右底面滑块,所述右内侧面滑块与所述第一前滑轨滑动连接,所述右底面滑块与所述第二后滑轨滑动连接;
7、所述左内侧面滑块以及所述右内侧面滑块分别与所述皮带组件连接固定。
8、在其中一个实施例中,所述同步夹爪机械手还包括机械手法兰,所述机械手法兰安装固定在所述支撑板的表面。
9、在其中一个实施例中,所述机械手法兰位于所述支撑板表面的中部区域。
10、在其中一个实施例中,所述前导轨以及所述后导轨平行设置。
11、在其中一个实施例中,所述前导轨以及所述后导轨均为长方体结构。
12、在其中一个实施例中,所述左夹板朝向所述右夹板的表面,以及,所述右夹板朝向所述左夹板的表面分别设置有草皮垫块。
13、在其中一个实施例中,所述左夹板邻近所述皮带组件的左端部,所述左内侧面滑块连接在所述皮带组件下行带的中部区域。
14、在其中一个实施例中,所述右夹板邻近所述皮带组件的右端部,所述右内侧面滑块连接在所述皮带组件上行带的中部区域。
15、在其中一个实施例中,所述电机组件包括伺服电机、电机安装板、同步轮以及传动带,所述伺服电机安装在所述电机安装板上,所述电机安装板安装固定在所述支撑板表面的端部,所述同步轮与所述伺服电机的驱动轴同轴连接,所述同步轮通过所述传动带与所述皮带组件驱动连接。
16、在其中一个实施例中,所述支撑板开设有让位缺口,所述传动带穿设所述让位缺口并与所述皮带组件连接。
17、上述同步夹爪机械手,通过电机组件带动皮带组件,在皮带组件的驱动下左夹板以及右夹板同步地相互靠近,以夹取位于左夹板以及右夹板之间的产品物料,而通过设置电机组件的行程,可使得皮带组件在预设定的电机行程结束后停止驱动左夹板以及右夹板相互靠近,而该电机组件的行程则根据物料产品的尺寸规格设定,从而能适应各种规格尺寸的产品物料,极大地提高了本实用新型的同步夹爪机械手的适用性,且左夹板以及右夹板同步地相互靠近的置中夹取方式更加地灵活、可靠。
技术特征:
1.一种同步夹爪机械手,其特征在于,包括:支撑板、电机组件、皮带组件、导轨组件以及夹爪组件;
2.根据权利要求1所述的同步夹爪机械手,其特征在于,所述同步夹爪机械手还包括机械手法兰,所述机械手法兰安装固定在所述支撑板的表面。
3.根据权利要求2所述的同步夹爪机械手,其特征在于,所述机械手法兰位于所述支撑板表面的中部区域。
4.根据权利要求1所述的同步夹爪机械手,其特征在于,所述前导轨以及所述后导轨平行设置。
5.根据权利要求1所述的同步夹爪机械手,其特征在于,所述前导轨以及所述后导轨均为长方体结构。
6.根据权利要求1所述的同步夹爪机械手,其特征在于,所述左夹板朝向所述右夹板的表面,以及,所述右夹板朝向所述左夹板的表面分别设置有草皮垫块。
7.根据权利要求1所述的同步夹爪机械手,其特征在于,所述左夹板邻近所述皮带组件的左端部,所述左内侧面滑块连接在所述皮带组件下行带的中部区域。
8.根据权利要求7所述的同步夹爪机械手,其特征在于,所述右夹板邻近所述皮带组件的右端部,所述右内侧面滑块连接在所述皮带组件上行带的中部区域。
9.根据权利要求1至8中任一项所述的同步夹爪机械手,其特征在于,所述电机组件包括伺服电机、电机安装板、同步轮以及传动带,所述伺服电机安装在所述电机安装板上,所述电机安装板安装固定在所述支撑板表面的端部,所述同步轮与所述伺服电机的驱动轴同轴连接,所述同步轮通过所述传动带与所述皮带组件驱动连接。
10.根据权利要求9所述的同步夹爪机械手,其特征在于,所述支撑板开设有让位缺口,所述传动带穿设所述让位缺口并与所述皮带组件连接。
技术总结
本技术公开了一种同步夹爪机械手,该同步夹爪机械手包括:支撑板、电机组件、皮带组件、导轨组件以及夹爪组件;夹爪组件包括左夹板以及右夹板,左夹板以及右夹板分别位于支撑板背面的左右两端。上述同步夹爪机械手,通过电机组件带动皮带组件,在皮带组件的驱动下左夹板以及右夹板同步地相互靠近,以夹取产品物料,而通过设置电机组件的行程,可使得皮带组件在预设定的电机行程结束后停止驱动左夹板以及右夹板相互靠近,而该电机组件的行程则根据物料产品的尺寸规格设定,从而能适应各种规格尺寸的产品物料,极大地提高了本技术的同步夹爪机械手的适用性,且左夹板以及右夹板同步地相互靠近的置中夹取方式更加地灵活、可靠。
技术研发人员:张俊峰,顼文佳
受保护的技术使用者:深圳恒温精控智能装备有限公司
技术研发日:20230303
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!