一种夹头可旋转机械手的制作方法
本技术属于机械手,具体涉及一种夹头可旋转机械手。
背景技术:
1、机械手的一种应用于自动化设备中,用于抓取物品以及用于物品运输的设备,不同的领域行业中机械手的结构都不尽相同。
2、而随着科技的发展,机械手的功能性也越来越丰富,人们在机械手的端部增加电机、旋转轴,即可使得机械手的端部可旋转,灵活性更高,实际进行作业更加方便。
3、现有的机械手具有一定的限制性,机械手的尺寸和型号往往根据需要夹持的产品进行匹配,如想要夹持体积较小的产品时,例如肥皂盒、金属件、插座开关等,多采用间距较小的机械手来操作,而对于一些大的部件,如家电类底座、键盘、电水壶等,往往采用间距相对较大的机械手夹持移动,这就使得不同产品需要单独设置机械手,带来了资源浪费,使得机械手适配度相对较低,为此我们提出一种夹头可旋转机械手。
技术实现思路
1、本实用新型的目的在于提供一种夹头可旋转机械手,以解决上述背景技术中提出的机械手的尺寸和型号往往根据需要夹持的产品进行匹配,如想要夹持体积较小的产品时,例如肥皂盒、金属件、插座开关等,多采用间距较小的机械手来操作,而对于一些大的部件,如家电类底座、键盘、电水壶等,往往采用间距相对较大的机械手夹持移动,这就使得不同产品需要单独设置机械手,带来了资源浪费,使得机械手适配度相对较低等问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种夹头可旋转机械手,包括z轴移动件、机械手底座,所述z轴移动件的表面活动连接有机械手主体,所述机械手主体包括支撑底横板、连接固定外壳,所述支撑底横板的顶部通过转动底轴转动连接有转动电机;
3、第一夹持部,对称分布于支撑底横板的两侧,所述第一夹持部包括夹持立板,且所述夹持立板通过电动旋转轴a转动连接于支撑底横板的两侧壁;
4、第二夹持部,均匀分布于支撑底横板的底壁,所述第二夹持部包括第三夹持板,且所述第三夹持板位于支撑底横板的底部,二者活动连接。
5、优选的,所述支撑底横板的侧壁对称设有连接块,且所述电动旋转轴a的两端均与连接块相连接;
6、当电动旋转轴a运转后,夹持立板以电动旋转轴a的圆心做圆周运动。
7、优选的,所述夹持立板的底部通过电动旋转轴b转动连接有夹持弯头,且当电动旋转轴b运转后,夹持弯头以电动旋转轴b的圆心做圆周运动。
8、优选的,所述支撑底横板的底壁设有多个限位横板,且所述支撑底横板的底部从左到右依次设有第一夹持板、第二夹持板、第四夹持板,且所述第一夹持板、第二夹持板、第三夹持板、第四夹持板均通过电动伸缩杆与限位横板相连接。
9、优选的,所述限位横板的高度大于电动伸缩杆的直径,所述第三夹持板的高度大于限位横板的高度;
10、且所述第一夹持板、第二夹持板、第三夹持板、第四夹持板的两侧表面均镶嵌有压力传感器。
11、优选的,所述支撑底横板的表面设有刻度尺,且所述刻度尺以限位横板的对称轴线向两侧对称分部。
12、优选的,所述连接固定外壳位于支撑底横板的顶部,且所述连接固定外壳的一侧与z轴移动件相连接,且所述连接固定外壳将转动电机包裹在内,所述支撑底横板的底壁设有用于第三夹持板移动的移动滑轨。
13、优选的,所述机械手底座的顶部设有x轴移动件,所述x轴移动件的顶部活动连接有y轴移动件,所述z轴移动件位于y轴移动件的顶部,且所述y轴移动件、z轴移动件相互垂直。
14、与现有技术相比,本实用新型的有益效果是:
15、由第一夹持部、第二夹持部可以增加机械手适配度,使得机械手在实际作业时非常灵活,可根据需求进行调节适配使用,当机械手夹持一些体积较小的产品时,可通过电动伸缩杆带动第一夹持板进行移动,使得第一夹持板、第二夹持板将产品夹持在内,而当需要夹持一些体积较大的产品时,可通过两个夹持立板、夹持弯头进行夹持,使得一个机械手具备多种体积产品的夹持,灵活度较高。
16、第三夹持板、第一夹持板、第二夹持板、第四夹持板的两侧壁均镶嵌设有压力传感器,使得在夹持一些体积较小的产品时,可通过压力传感器判断夹持力度,减少了对产品的损坏,也便于工程师对机械手的调试,降低了经济损失。
17、而第二夹持板、第三夹持板可进一步夹持产品,正常情况下,体积较小的产品通过第一夹持板、第二夹持板夹持,而当产品体积较小、长度较长时,可第二夹持板、第三夹持板通过电动伸缩杆的移动,也可起到夹持效果,灵活性更高。
技术特征:
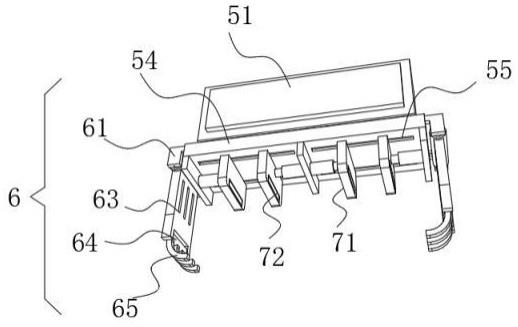
1.一种夹头可旋转机械手,包括z轴移动件(4)、机械手底座(1),所述z轴移动件(4)的表面活动连接有机械手主体(5),其特征在于:所述机械手主体(5)包括支撑底横板(54)、连接固定外壳(51),所述支撑底横板(54)的顶部通过转动底轴(53)转动连接有转动电机(52);
2.根据权利要求1所述的一种夹头可旋转机械手,其特征在于:所述支撑底横板(54)的侧壁对称设有连接块(61),且所述电动旋转轴a(62)的两端均与连接块(61)相连接;
3.根据权利要求2所述的一种夹头可旋转机械手,其特征在于:所述夹持立板(63)的底部通过电动旋转轴b(64)转动连接有夹持弯头(65),且当电动旋转轴b(64)运转后,夹持弯头(65)以电动旋转轴b(64)的圆心做圆周运动。
4.根据权利要求1所述的一种夹头可旋转机械手,其特征在于:所述支撑底横板(54)的底壁设有多个限位横板(75),且所述支撑底横板(54)的底部从左到右依次设有第一夹持板(73)、第二夹持板(74)、第四夹持板(77),且所述第一夹持板(73)、第二夹持板(74)、第三夹持板(71)、第四夹持板(77)均通过电动伸缩杆(76)与限位横板(75)相连接。
5.根据权利要求4所述的一种夹头可旋转机械手,其特征在于:所述限位横板(75)的高度大于电动伸缩杆(76)的直径,所述第三夹持板(71)的高度大于限位横板(75)的高度;
6.根据权利要求5所述的一种夹头可旋转机械手,其特征在于:所述支撑底横板(54)的表面设有刻度尺(56),且所述刻度尺(56)以限位横板(75)的对称轴线向两侧对称分部。
7.根据权利要求5所述的一种夹头可旋转机械手,其特征在于:所述连接固定外壳(51)位于支撑底横板(54)的顶部,且所述连接固定外壳(51)的一侧与z轴移动件(4)相连接,且所述连接固定外壳(51)将转动电机(52)包裹在内,所述支撑底横板(54)的底壁设有用于第三夹持板(71)移动的移动滑轨(55)。
8.根据权利要求1所述的一种夹头可旋转机械手,其特征在于:所述机械手底座(1)的顶部设有x轴移动件(2),所述x轴移动件(2)的顶部活动连接有y轴移动件(3),所述z轴移动件(4)位于y轴移动件(3)的顶部,且所述y轴移动件(3)、z轴移动件(4)相互垂直。
技术总结
本技术属于机械手技术领域,公开了一种夹头可旋转机械手,包括z轴移动件、机械手底座,所述z轴移动件的表面活动连接有机械手主体,所述机械手主体包括支撑底横板、连接固定外壳,所述支撑底横板的顶部通过转动底轴转动连接有转动电机;第一夹持部,对称分布于支撑底横板的两侧,所述第一夹持部包括夹持立板,且所述夹持立板通过电动旋转轴a转动连接于支撑底横板的两侧壁;由第一夹持部、第二夹持部可以增加机械手适配度,使得机械手在实际作业时非常灵活,可根据需求进行调节适配使用,通过电动伸缩杆带动第一夹持板进行移动,使得第一夹持板、第二夹持板将产品夹持在内,灵活度较高。
技术研发人员:郑之勇,丁义
受保护的技术使用者:东莞市汉萨自动化设备科技有限公司
技术研发日:20230314
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!