一种可上下料的工业搬运机器人的制作方法
本技术涉及机器人,具体是一种可上下料的工业搬运机器人。
背景技术:
1、工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,广泛用于工业生产的搬运、周转等工作,例如现有专利技术所示:经检索,中国专利网公开了一种工业搬运机器人(公开公告号cn217046394u),此类装置通过连接杆推动吸盘到相应位置吸附货物,同时推动第二电动推杆使抓取杆向货物方向移动,两者配合同时使用,可以对不同货物进行搬运。
2、但是,针对上述公开专利以及现有市场所采取的工业搬运机器人,还存在一些不足之处:此类利用机械臂与吸盘组合对货物进行抓取搬运的方式,其只能进行重量较轻的货物抓取搬运工作,当货物较重时,极易由于重压导致货物出现脱落,或者机械臂上下翻折过程中出现折断的情况。因此,本领域技术人员提供了一种可上下料的工业搬运机器人,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种可上下料的工业搬运机器人,以解决上述背景技术中提出的问题。
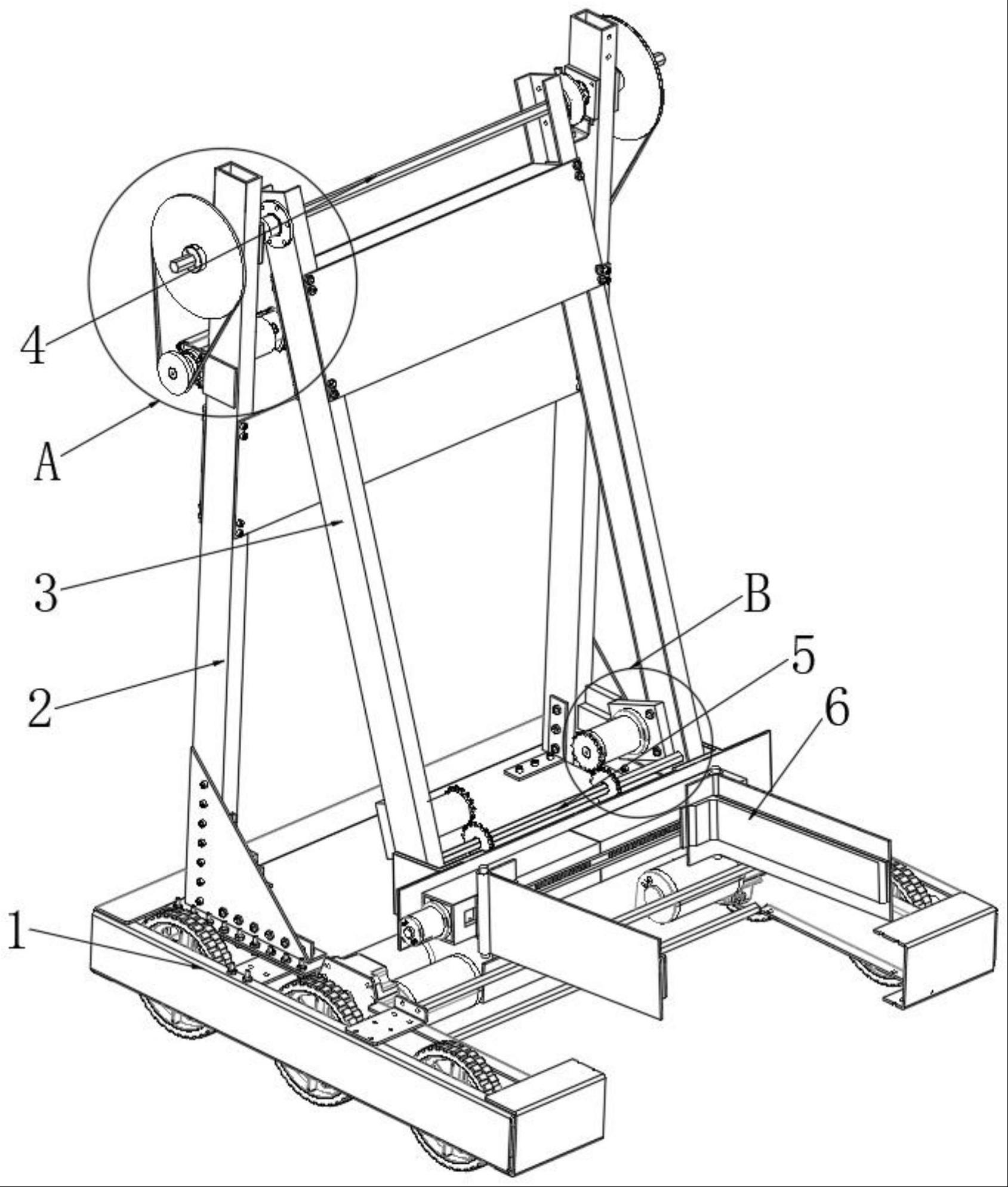
2、为实现上述目的,本实用新型提供如下技术方案:一种可上下料的工业搬运机器人,包括驱动车,所述驱动车的推架上方设置有上下搬运机构,且上下搬运机构中第二传动轴的输出端连接有夹臂机构;
3、所述上下搬运机构包括安装在驱动车推架上方的支撑立架,所述支撑立架的支架顶部转动连接有第一传动轴,且支撑立架的支架顶部正对于第一传动轴的两端输出端对称设置有两组第一传动电机,所述第一传动轴的轴杆端套设有旋转摆臂,所述旋转摆臂的支架底部转动连接有第二传动轴,且旋转摆臂的支架底部正对于第二传动轴的两端输出端对称设置有两组第二传动电机。
4、作为本实用新型再进一步的方案:所述夹臂机构包括安装在第二传动轴输出端的旋转座,所述旋转座的支座前侧安装有导轨架,所述导轨架的轨道内部转动连接有驱动丝杆,且导轨架的一端输出端贯穿导轨架设置有驱动电机,所述导轨架的丝杆外侧对称套设有两组传动滑台,且两组传动滑台的支座面对称设置有两组夹臂。
5、作为本实用新型再进一步的方案:所述驱动丝杆以中线为界,中线的两侧分别设置有相互对称排列的正、反丝牙,所述驱动丝杆通过正、反丝牙与两组传动滑台对称套接。
6、作为本实用新型再进一步的方案:两组所述第一传动电机的输出端均设置有同步带轮a,所述第一传动轴的两端输出端均设置有同步带轮b,且同步带轮a与同步带轮b之间通过同步带连接。
7、作为本实用新型再进一步的方案:两组所述第二传动电机的输出端均设置有传动齿轮a,所述第二传动轴的轴杆端对称套设有与两组传动齿轮a相啮合传动的两组传动齿轮b。
8、与现有技术相比,本实用新型的有益效果是:
9、本实用新型通过夹臂机构对货物的机械式夹固,其一方面具有更高的夹固稳定性,另一方面能够对不同重量的货物进行夹固工作,且在对货物夹固的同时,通过驱动车的驱动位移,以及上下搬运机构的臂杆式、上下抬升,一方面具有灵活的上下料搬运性能,另一方面其臂杆式承压、抗压能力更强,能够适应不同重量的货物,提高其搬运能力。
技术特征:
1.一种可上下料的工业搬运机器人,包括驱动车(1),其特征在于,所述驱动车(1)的推架上方设置有上下搬运机构,且上下搬运机构中第二传动轴(5)的输出端连接有夹臂机构(6);
2.根据权利要求1所述的一种可上下料的工业搬运机器人,其特征在于,所述夹臂机构(6)包括安装在第二传动轴(5)输出端的旋转座(61),所述旋转座(61)的支座前侧安装有导轨架(62),所述导轨架(62)的轨道内部转动连接有驱动丝杆(64),且导轨架(62)的一端输出端贯穿导轨架(62)设置有驱动电机(63),所述导轨架(62)的丝杆外侧对称套设有两组传动滑台(65),且两组传动滑台(65)的支座面对称设置有两组夹臂(66)。
3.根据权利要求2所述的一种可上下料的工业搬运机器人,其特征在于,所述驱动丝杆(64)以中线为界,中线的两侧分别设置有相互对称排列的正、反丝牙,所述驱动丝杆(64)通过正、反丝牙与两组传动滑台(65)对称套接。
4.根据权利要求1所述的一种可上下料的工业搬运机器人,其特征在于,两组所述第一传动电机(7)的输出端均设置有同步带轮a(8),所述第一传动轴(4)的两端输出端均设置有同步带轮b(10),且同步带轮a(8)与同步带轮b(10)之间通过同步带(9)连接。
5.根据权利要求1所述的一种可上下料的工业搬运机器人,其特征在于,两组所述第二传动电机(11)的输出端均设置有传动齿轮a(12),所述第二传动轴(5)的轴杆端对称套设有与两组传动齿轮a(12)相啮合传动的两组传动齿轮b(13)。
技术总结
本技术涉及机器人技术领域,公开了一种可上下料的工业搬运机器人,所述驱动车的推架上方设置有上下搬运机构,所述支撑立架的支架顶部转动连接有第一传动轴,所述第一传动轴的轴杆端套设有旋转摆臂,所述旋转摆臂的支架底部转动连接有第二传动轴,且上下搬运机构中第二传动轴的输出端连接有夹臂机构。本技术通过夹臂机构对货物的机械式夹固,其一方面具有更高的夹固稳定性,另一方面能够对不同重量的货物进行夹固工作,且在对货物夹固的同时,通过驱动车的驱动位移,以及上下搬运机构的臂杆式、上下抬升,一方面具有灵活的上下料搬运性能,另一方面其臂杆式承压、抗压能力更强,能够适应不同重量的货物。
技术研发人员:张崇波,张春伟,刘伟文,程东,张雪竹,李军伟,刘张晨,解秋爽,王金旭
受保护的技术使用者:北京市产品质量监督检验研究院
技术研发日:20230320
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!