一种机器人抓手的制作方法
本技术涉及机器人抓手,更具体地说是一种机器人抓手。
背景技术:
1、工业机器人的应用中,机器人抓手必不可少,是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业。
2、公开号为cn210436156u的中国专利文件中,包括底板,底板的顶部位于竖中线上焊接有直管,直管的另一端焊接有固定板,固定板的顶部位于底板的竖直中线上通过螺栓固定有驱动电机。该机器人抓手,驱动电机可以带动转轴转动,与转轴螺纹连接的螺纹套会发生移动,通过两个拉杆,带动两个抓手夹杆以定位杆为中心发生转动,对物体进行夹持或者松开物体,该装置结构简单,设置的滑块、滑杆可以增强抓手夹杆的稳定性,当需要对驱动电机进行维护时,可以拆卸支柱与安装板之间固定的螺栓,对安装板、罩体进行拆卸,便可以对驱动电机进行维护,设置的弹簧可以使得限位杆不会发生意外移动,保障夹持的安全性。
3、上述技术方案借助转轴的转动带动螺纹套和抓手夹杆上下运动,而转轴底端为悬空状,使得转轴底端稳定性不高,导致转轴会出现受力不均衡而造成扭曲变形的情况,进而会影响抓手夹杆运动时的稳定性。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型提供一种机器人抓手,通过电机驱动由皮带相连接的两个皮带轮转动,借此可以使两个皮带轮分别驱动两个螺纹杆同步转动,由此可以确保滑座带动横板和支撑板运动时的稳定性,同时也能保障两个活动板夹持时的稳定性,且螺纹杆外部由固定框进行支撑限位,保障螺纹杆转动时的稳定性,避免螺纹杆出现受力不均衡而发生扭曲变形的情况,以解决上述背景技术中出现的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种机器人抓手,包括基板,所述基板底端设有用于夹持工件的夹持组件;
3、所述基板顶端设有用于驱动夹持组件运动的驱动组件;
4、位于驱动组件顶部设有用于调节夹持组件高度的调节组件;
5、所述驱动组件包括两个固定框,两个固定框均固定设于基板顶部,两个固定框内部均设有螺纹杆,所述螺纹杆顶端和底端均通过轴承分别与固定框内腔顶部和内腔底部活动连接,所述螺纹杆外部螺纹连接有滑座;
6、两个固定框顶端均设有联动轴,所述联动轴底端贯穿固定框并与螺纹杆顶端固定连接,所述联动轴顶端固定设有皮带轮,两个皮带轮之间设有皮带,两个皮带轮通过皮带相连接。
7、在一个优选地实施方式中,所述夹持组件包括两个活动板,两个活动板均设于基板底部,两个活动板底端相靠近的一侧均固定设有夹板,所述活动板顶端贯穿活动板并延伸至基板顶部,所述活动板与基板活动连接,通过借助与基板活动连接的活动板,使得两个活动板的转动可以对产品进行夹持固定。
8、在一个优选地实施方式中,两个活动板顶端之间设有支撑板,所述支撑板底端两侧均活动设有连接板,所述连接板远离支撑板的一端与活动板活动连接,所述支撑板顶端固定设有横板,所述横板两端分别与两个滑座固定连接,通过活动连接的连接板,使得支撑板在运动中可以带动两个活动板同时向内或同时向外运动,借此达到夹持固定产品的效果。
9、在一个优选地实施方式中,所述中板顶部设有电机,所述电机位于其中一个皮带轮顶部,所述电机输出端贯穿中板并与其中一个皮带轮顶部固定连接,通过电机的运转带动由皮带相连接的两个皮带轮转动,借此可以驱动两个螺纹杆转动,保障横板运动时的稳定性。
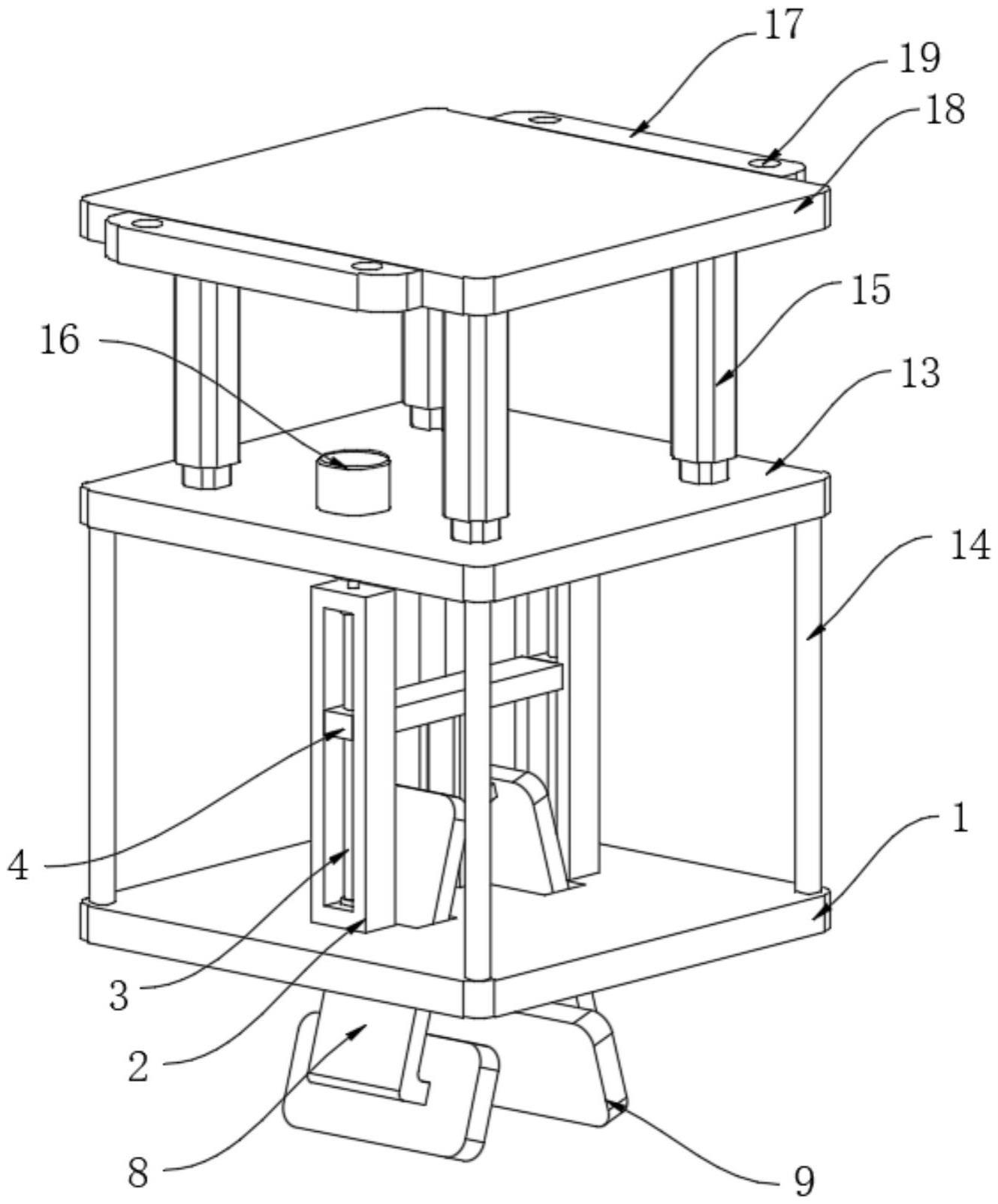
10、在一个优选地实施方式中,所述调节组件包括中板,所述中板设于两个固定框顶部,所述中板底端固定设有多个支脚,多个支脚之间均匀间隔分布,所述支脚底端与基板顶部固定连接;所述中板顶端设有顶板,所述顶板底端设有多个电动推杆,多个电动推杆之间均匀间隔分布,所述电动推杆底端与中板顶部固定连接,通过电动推杆的伸展及收缩,可以带动夹持组件进行夹持高度的调节,以此提高操作本实用新型的实用性和调节高度时的灵活性。
11、在一个优选地实施方式中,所述顶板两侧均固定设有定位板,所述定位板内部贯穿开设有两个定位孔,两个定位孔关于定位板中心轴线前后对称分布,所述定位板和定位孔的设置,便于将本实用新型安装至相应设备处,提高工作人员安装的便捷性。
12、本实用新型的技术效果和优点:
13、1、通过电机驱动由皮带相连接的两个皮带轮转动,借此可以使两个皮带轮分别驱动两个螺纹杆同步转动,由此可以确保滑座带动横板和支撑板运动时的稳定性,同时也能保障两个活动板夹持时的稳定性,且螺纹杆外部由固定框进行支撑限位,保障螺纹杆转动时的稳定性,避免螺纹杆出现受力不均衡而发生扭曲变形的情况;
14、2、通过电动推杆的伸展及收缩,可以带动夹持组件进行夹持高度的调节,以此提高操作本实用新型的实用性和调节高度时的灵活性。
技术特征:
1.一种机器人抓手,包括基板(1),其特征在于:所述基板(1)底端设有用于夹持工件的夹持组件;
2.根据权利要求1所述的一种机器人抓手,其特征在于:所述夹持组件包括两个活动板(8),两个活动板(8)均设于基板(1)底部,两个活动板(8)底端相靠近的一侧均固定设有夹板(9),所述活动板(8)顶端贯穿活动板(8)并延伸至基板(1)顶部,所述活动板(8)与基板(1)活动连接。
3.根据权利要求2所述的一种机器人抓手,其特征在于:两个活动板(8)顶端之间设有支撑板(10),所述支撑板(10)底端两侧均活动设有连接板(11),所述连接板(11)远离支撑板(10)的一端与活动板(8)活动连接,所述支撑板(10)顶端固定设有横板(12),所述横板(12)两端分别与两个滑座(4)固定连接。
4.根据权利要求1所述的一种机器人抓手,其特征在于:所述调节组件包括中板(13),所述中板(13)设于两个固定框(2)顶部,所述中板(13)底端固定设有多个支脚(14),多个支脚(14)之间均匀间隔分布,所述支脚(14)底端与基板(1)顶部固定连接;
5.根据权利要求4所述的一种机器人抓手,其特征在于:所述中板(13)顶部设有电机(16),所述电机(16)位于其中一个皮带轮(6)顶部,所述电机(16)输出端贯穿中板(13)并与其中一个皮带轮(6)顶部固定连接。
6.根据权利要求4所述的一种机器人抓手,其特征在于:所述顶板(18)两侧均固定设有定位板(17),所述定位板(17)内部贯穿开设有两个定位孔(19),两个定位孔(19)关于定位板(17)中心轴线前后对称分布。
技术总结
本技术公开了一种机器人抓手,具体涉及机器人抓手技术领域,包括基板,所述基板底端设有用于夹持工件的夹持组件;所述基板顶端设有用于驱动夹持组件运动的驱动组件;位于驱动组件顶部设有用于调节夹持组件高度的调节组件;所述驱动组件包括两个固定框,两个固定框均固定设于基板顶部,两个固定框内部均设有螺纹杆。本技术通过电机驱动由皮带相连接的两个皮带轮转动,借此可以使两个皮带轮分别驱动两个螺纹杆同步转动,由此可以确保滑座带动横板和支撑板运动时的稳定性,同时也能保障两个活动板夹持时的稳定性,且螺纹杆外部由固定框进行支撑限位,保障螺纹杆转动时的稳定性,避免螺纹杆出现受力不均衡而发生扭曲变形的情况。
技术研发人员:王恩博,王保庆,潘克非
受保护的技术使用者:哈尔滨科锐同创机模制造有限公司
技术研发日:20230321
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!