一种自适应柔性机械手夹具的制作方法
本技术涉及机械手夹具的,具体为一种自适应柔性机械手夹具。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,机械手是最早出现的工业机器人,也是最早出现的现代机器人,机械手往往会配备夹爪进行夹取物品。
2、目前的机械手夹爪,通用性差,在零件规格更换时,需更换夹爪或反复调节夹爪位置,耗时耗力,降低了工作效率。
技术实现思路
1、本实用新型的目的在于提供一种自适应柔性机械手夹具,以解决上述背景技术中提出的目前的机械手夹爪,通用性差,在零件规格更换时,需更换夹爪或反复调节夹爪位置,耗时耗力,降低了工作效率的问题。
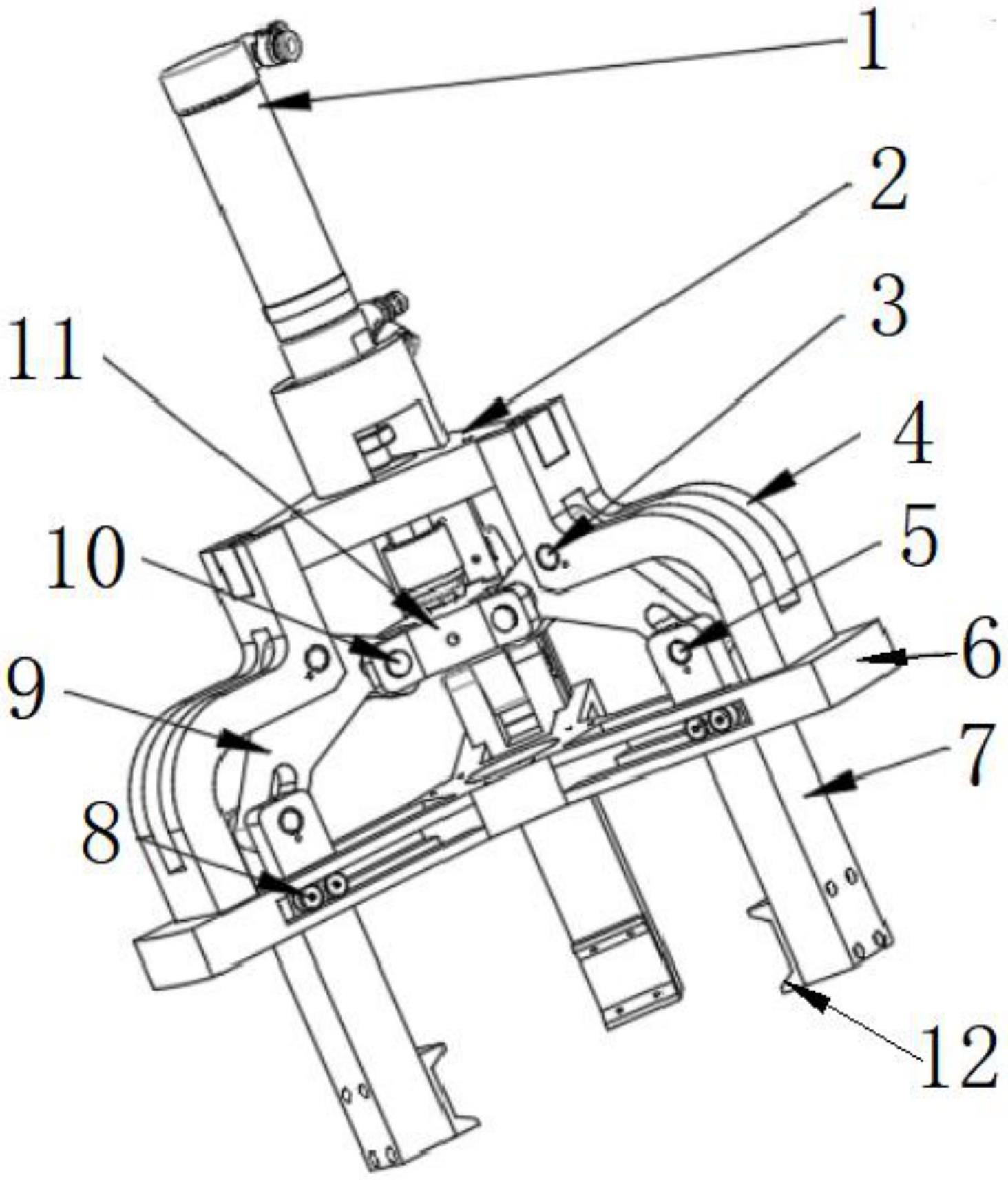
2、为实现上述目的,本实用新型提供如下技术方案:一种自适应柔性机械手夹具,包括主动气缸,所述主动气缸的底部固定连接有安装板,所述安装板的外侧固定连接有三个固定连杆,三个所述固定连杆的底部均固定连接有固定板,所述主动气缸的输出端固定连接有浮动接头,所述浮动接头的外侧铰接有三个柔性连杆,三个所述柔性连杆的底部均铰接有柔性夹爪,所述柔性夹爪的两侧均安装有便于柔性夹爪滑动导向的凸轮轴承随动器,所述固定板的中部开设有与凸轮轴承随动器相匹配的导向滑槽,且所述凸轮轴承随动器与导向滑槽滑动连接。
3、作为本实用新型的一种优选技术方案,所述固定连杆的中部转动连接有便于柔性连杆铰接的第一圆柱销,且所述第一圆柱销与柔性连杆顶部的一侧穿插连接,第一圆柱销便于柔性连杆顶部的限位。
4、作为本实用新型的一种优选技术方案,所述柔性夹爪的顶部转动连接有便于柔性连杆铰接的第二圆柱销,所述第二圆柱销与柔性连杆的底部穿插连接,第二圆柱销便于对柔性连杆的底部进行限位。
5、作为本实用新型的一种优选技术方案,所述浮动接头的外侧转动连接有与柔性连杆铰接的第三圆柱销,所述第三圆柱销与柔性连杆远离柔性夹爪的一端穿插连接。
6、作为本实用新型的一种优选技术方案,三个所述固定板的一端两两连接,所述柔性夹爪底部的内侧固定安装有便于夹取物品的夹片,夹片用于夹住物品零件。
7、作为本实用新型的一种优选技术方案,所述固定板的中心开设有便于柔性夹爪滑动的中心槽,所述柔性夹爪与中心槽的内部滑动连接,中心槽便于对柔性夹爪进行滑动导向。
8、与现有技术相比,本实用新型的有益效果是:
9、使用过程中主动气缸向上运动时,主动气缸带动浮动接头向上运动,从而使得柔性连杆向上运动,柔性连杆上移的过程中会拉动底部的柔性夹爪,同时使得沿凸轮轴承随动器在固定板的导向滑槽内部向内滑动,三个柔性夹爪靠近以达到夹紧零件的功能,同理主动气缸向下运动时三个柔性夹爪远离,松开夹持的零件,整个机械手夹具利用三爪结构,可根据固定板的大小,在某规格范围内,更换零件规格时,无需再更换夹爪或反复调节夹爪位置,只要调节主动气缸即可完成夹持工作,使用非常方便。
技术特征:
1.一种自适应柔性机械手夹具,包括主动气缸(1),其特征在于:所述主动气缸(1)的底部固定连接有安装板(2),所述安装板(2)的外侧固定连接有三个固定连杆(4),三个所述固定连杆(4)的底部均固定连接有固定板(6),所述主动气缸(1)的输出端固定连接有浮动接头(11),所述浮动接头(11)的外侧铰接有三个柔性连杆(9),三个所述柔性连杆(9)的底部均铰接有柔性夹爪(7),所述柔性夹爪(7)的两侧均安装有便于柔性夹爪(7)滑动导向的凸轮轴承随动器(8),所述固定板(6)的中部开设有与凸轮轴承随动器(8)相匹配的导向滑槽(13),且所述凸轮轴承随动器(8)与导向滑槽(13)滑动连接。
2.根据权利要求1所述的一种自适应柔性机械手夹具,其特征在于:所述固定连杆(4)的中部转动连接有便于柔性连杆(9)铰接的第一圆柱销(3),且所述第一圆柱销(3)与柔性连杆(9)顶部的一侧穿插连接。
3.根据权利要求1所述的一种自适应柔性机械手夹具,其特征在于:所述柔性夹爪(7)的顶部转动连接有便于柔性连杆(9)铰接的第二圆柱销(5),所述第二圆柱销(5)与柔性连杆(9)的底部穿插连接。
4.根据权利要求1所述的一种自适应柔性机械手夹具,其特征在于:所述浮动接头(11)的外侧转动连接有与柔性连杆(9)铰接的第三圆柱销(10),所述第三圆柱销(10)与柔性连杆(9)远离柔性夹爪(7)的一端穿插连接。
5.根据权利要求1所述的一种自适应柔性机械手夹具,其特征在于:三个所述固定板(6)的一端两两连接,所述柔性夹爪(7)底部的内侧固定安装有便于夹取物品的夹片(12)。
6.根据权利要求1所述的一种自适应柔性机械手夹具,其特征在于:所述固定板(6)的中心开设有便于柔性夹爪(7)滑动的中心槽(14),所述柔性夹爪(7)与中心槽(14)的内部滑动连接。
技术总结
本技术公开了一种自适应柔性机械手夹具,包括主动气缸,主动气缸的底部固定连接有安装板,安装板的外侧固定连接有三个固定连杆,三个固定连杆的底部均固定连接有固定板,主动气缸的输出端固定连接有浮动接头,浮动接头的外侧铰接有三个柔性连杆,三个柔性连杆的底部均铰接有柔性夹爪,柔性夹爪的两侧均安装有便于柔性夹爪滑动导向的凸轮轴承随动器,固定板的中部开设有与凸轮轴承随动器相匹配的导向滑槽,且凸轮轴承随动器与导向滑槽滑动连接,本技术一种自适应柔性机械手夹具,整个机械手夹具利用三爪结构,可根据固定板的大小,更换零件规格时,无需再更换夹爪或反复调节夹爪位置,只要调节主动气缸即可完成夹持工作。
技术研发人员:張馨予
受保护的技术使用者:诺信创自动化科技(昆山)有限公司
技术研发日:20230324
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!