一种雪茄烟智能管养机器人的制作方法
本技术涉及机器人,具体涉及一种雪茄烟智能管养机器人。
背景技术:
1、在对雪茄烟进行管养盘点时通常采用人工盘点的方式,人工管养盘点雪茄烟需要经过准备、清盘、校对大体三个流程,特别是清盘耗费时间长、效率低下,并且无法随时随地发起盘点,时动态反映盘点情况、核对库存。为了替代人工盘点的方式,缩短盘点时间从而提高盘点效率,本实用新型提出一种雪茄烟智能管养机器人。
技术实现思路
1、本实用新型的目的在于提供一种雪茄烟智能管养机器人,以替代人工盘点的方式,有效缩短盘点时间,提高盘点效率。
2、为解决上述的技术问题,本实用新型采用以下技术方案:
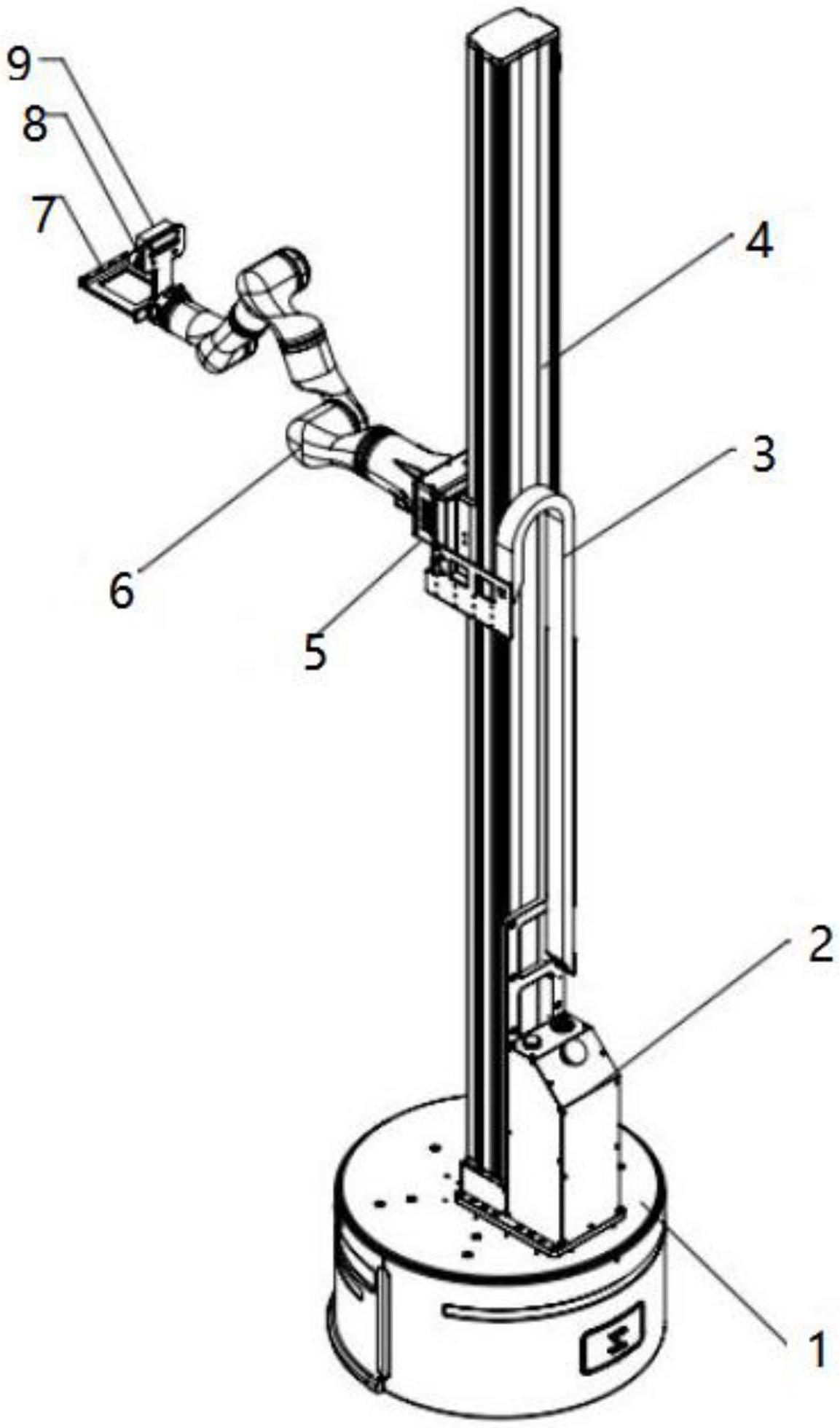
3、一种雪茄烟智能管养机器人,包括可进行移动和旋转的底座、机械臂和升降导轨,所述升降导轨垂直固定在底座上,在升降导轨上设置有用于接收和发送指令的主控模块,主控模块沿着升降导轨进行升降,在主控模块上连接有机械臂,机械臂的末端设置有用于抓取物体的末端执行器和用于用于获取深度图像与彩色图像的视觉模组。
4、进一步的,所述底座上设置有电气箱,电气箱上设置有电缆拖链,电缆拖链的另一端与主控模块连接。
5、进一步的,所述机械臂的末端还设置有光源,所述机械臂为六轴机械臂。
6、进一步的,所述末端执行器为电动夹爪。
7、进一步的,所述底座为agv小车。
8、与现有技术相比,本实用新型的有益效果是:
9、本实用新型通过设置视觉模组,用于识别目标物体并定位,引导机械臂到达合适抓取位置,机械臂上设置末端执行器以对物体进行抓取而通过机械臂能实现多方位的转动从而使得能精准的定位,且可通过底座和升降导轨来使得该机器人到达指定位置,通过这样使得盘点过程机器化,不需人工参与,缩短了盘点时间提高了盘点效率。
技术特征:
1.一种雪茄烟智能管养机器人,其特征在于:包括可进行移动和旋转的底座(1)、机械臂(6)和升降导轨(4),所述升降导轨(4)垂直固定在底座(1)上,在升降导轨(4)上设置有用于接收和发送指令的主控模块(5),主控模块(5)沿着升降导轨(4)进行升降,在主控模块(5)上连接有机械臂(6),机械臂(6)的末端设置有用于抓取物体的末端执行器(7)和用于用于获取深度图像与彩色图像的视觉模组(8)。
2.根据权利要求1所述的一种雪茄烟智能管养机器人,其特征在于:所述底座(1)上设置有电气箱(2),电气箱(2)上设置有电缆拖链(3),电缆拖链(3)的另一端与主控模块(5)连接。
3.根据权利要求1所述的一种雪茄烟智能管养机器人,其特征在于:所述机械臂(6)的末端还设置有光源(9),所述机械臂(6)为六轴机械臂。
4.根据权利要求1所述的一种雪茄烟智能管养机器人,其特征在于:所述末端执行器(7)为电动夹爪。
5.根据权利要求1所述的一种雪茄烟智能管养机器人,其特征在于:所述底座(1)为agv小车。
技术总结
本技术公开了一种雪茄烟智能管养机器人,包括可进行移动和旋转的底座、机械臂和升降导轨,所述升降导轨垂直固定在底座上,在升降导轨上设置有用于接收和发送指令的主控模块,主控模块沿着升降导轨进行升降,在主控模块上连接有机械臂,机械臂的末端设置有用于抓取物体的末端执行器和用于用于获取深度图像与彩色图像的视觉模组。本技术的目的在于提供一种雪茄烟智能管养机器人,以替代人工盘点的方式,有效缩短盘点时间,提高盘点效率。
技术研发人员:马文广,和世华,王纪文,和丽辉,陈续慧,毛永江,向俊龙,许兵,吴秋楠,丁争追格,杨永泉,杨东学,冯锦,罗丽嘉,黄国平
受保护的技术使用者:云南省烟草公司丽江市公司
技术研发日:20230323
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!