一种夹爪的制作方法
本技术涉及夹持装置,尤其涉及一种夹爪。
背景技术:
1、夹爪,通常作为执行部件,用于对目标物进行抓取,通常夹爪的夹持轨迹是以枢接处为圆心相互迫近并接触夹持,在对于圆形管转物进行夹持的过程中,通常需要将管转物夹持在夹爪之内,从而将其抓取,但是,对于直径较大不能直接被两个爪部包覆在其内的目标物则不适用,而通常的夹爪也只有在与圆形管状物的相切位置处作为受力点进行夹取物体,但是,由于受力点面积较小,需要较大的夹持力才能夹持目标物。
技术实现思路
1、本实用新型的目的在于提供一种夹爪,从及解决上述技术问题。
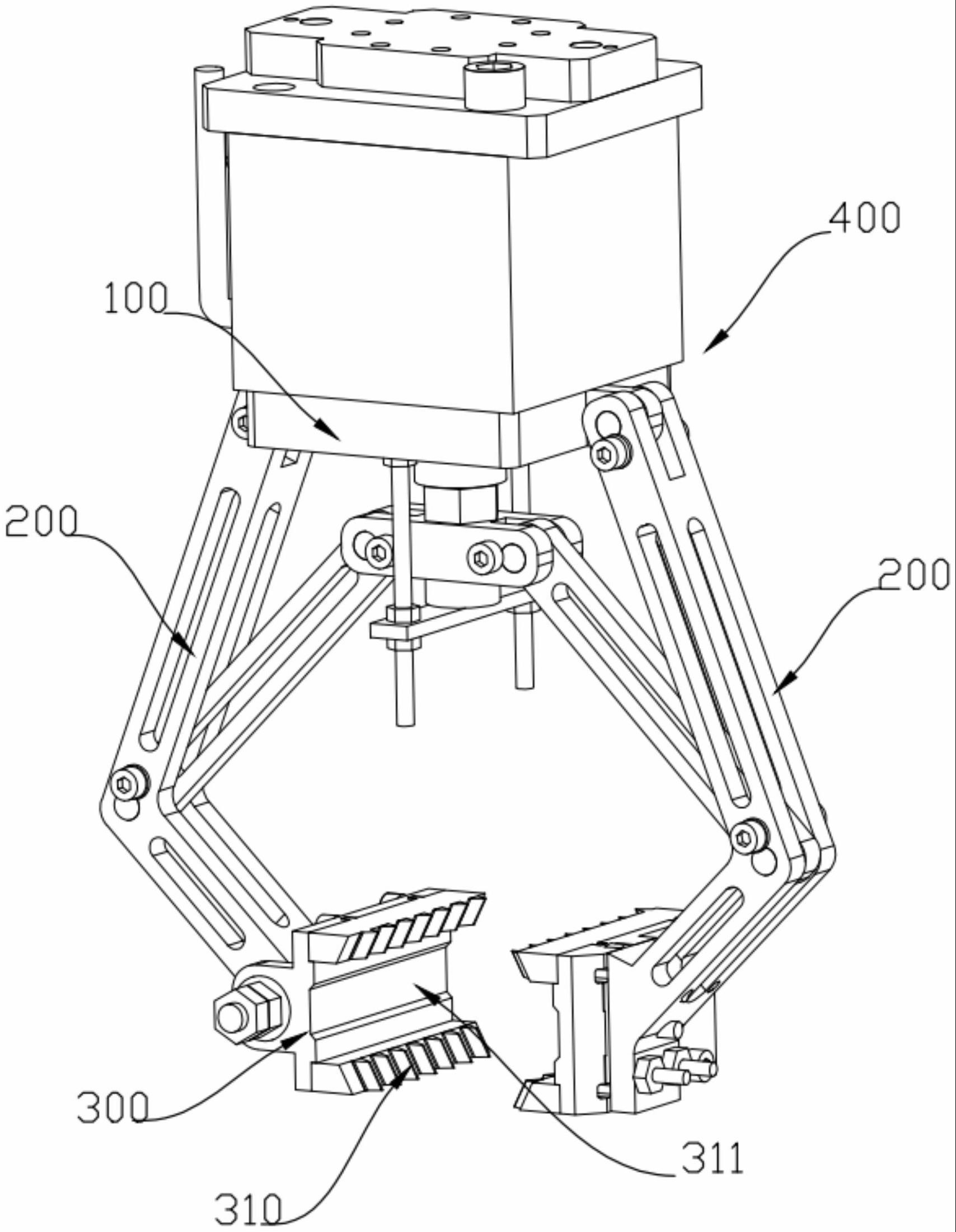
2、一种夹爪,包括有一安装板,还包括有:
3、夹紧臂,所述夹紧臂为两个,且其上端分别枢接在所述安装板两个相对端部;
4、爪部,所述爪部为相互对置的两个,分别装设在两个夹紧臂的下端之上,且两个所述爪部相互对应的端面之上均装配有两个沿上下方向并排的夹紧齿,两个所述夹紧齿之间构成容纳空间;
5、驱动组件,所述驱动组件装设在所述安装板之上,用以同时驱动两个所述夹紧臂沿枢轴摆动,进而带动所述爪部实现夹紧以及放松动作。
6、进一步的,所述爪部包括有一底板,所述底板装设在所述夹紧臂的下端之上,两个所述夹紧齿分别装设在所述底板的上下两端之上,所述底板之上位于两个所述夹紧齿之间开设有内陷区。
7、进一步的,所述夹紧齿包括有相互并排的若干个齿牙,所有所述齿牙齿顶所界定出的平面相对于竖直方向为倾斜的斜面。
8、进一步的,两个所述爪部之上的齿牙呈相互交错。
9、进一步的,所述驱动组件包括有:
10、驱动气缸,所述驱动气缸固定装设在所述安装板之上,并且其活塞杆沿竖直方向朝向下方伸出;
11、连杆,所述连杆为两个,其一端均枢接在所述驱动气缸的活塞杆之上,其另一端分别枢接在两个所述夹紧臂的中部位置。
12、进一步的,所述驱动组件还包括有一固定连接在所述驱动气缸活塞杆之上的联动板,两个所述连杆的上端枢接在所述联动板之上。
13、进一步的,所述夹紧臂包括相互构成有一夹角的第一段和第二段,所述连杆下端转动连接在所述夹紧臂的拐角处。
14、进一步的,所述驱动组件还包括有限位单元,用以限制所述驱动气缸活塞杆最大推出行程,所述限位单元包括有限位板,所述限位板设置于所述驱动气缸活塞杆向下伸出的移动路径之上,并通过连接杆固定连接在所述安装板之上。
15、进一步的,所述连接杆至少位于下段部分设置有螺纹,所述限位板之上开始有穿设于所述连接杆之上的通孔,且通过至少一个与所述连接杆螺栓连接的螺母装配在其上。
16、进一步的,其中一个底板与所述夹紧臂的下端转动连接,且其转轴的轴线与所述夹紧臂与所述安装板的枢接轴轴线相互并排。
17、与现有技术相比,本实用新型的有益效果在于:
18、本实用新型实施例提供一种夹爪,通过在夹爪上设置有两个沿上下方向相互并排的夹紧齿,且夹紧齿的齿顶面设置有斜面通过在相互夹紧的过程中两个爪部之上的齿牙相互交错的设置,能够在夹持直径较大的目标物的过程中,能够通过上述的结构增加与目标物外壁之间的接触点以及接触面面积,从而提高抓取的牢固性,尤其是,将一个爪部转动连接在夹紧臂之上,从而对与目标物之间的接触的角度进行调整,从而保证与目标物具有足够的接触点和接触面,保证对不同尺寸的目标物均有一定的稳定性;其次,驱动组件设置成平面连杆机构,结构简单,动作可靠,并且能够提供较大的动力;限位组件的设置能够防止两个夹紧臂的打开角度过大,从而避免干扰其他执行部件的工作。通过上述可以知晓,本夹爪能够对不能直接包覆在两个爪部之内的大直径目标物进行抓取,并且使得夹爪与目标物之间具有较高的夹紧稳定性。
19、下面结合说明书附图和实施方式对本实用新型做进一步的说明。
技术特征:
1.一种夹爪,包括有一安装板,其特征在于,还包括有:
2.根据权利要求1所述的一种夹爪,其特征在于,所述爪部包括有一底板,所述底板装设在所述夹紧臂的下端之上,两个所述夹紧齿分别装设在所述底板的上下两端之上,所述底板之上位于两个所述夹紧齿之间开设有内陷区。
3.根据权利要求2所述的一种夹爪,其特征在于,所述夹紧齿包括有相互并排的若干个齿牙,所有所述齿牙齿顶所界定出的平面相对于竖直方向为倾斜的斜面。
4.根据权利要求3所述的一种夹爪,其特征在于,两个所述爪部之上的齿牙呈相互交错。
5.根据权利要求1所述的一种夹爪,其特征在于,所述驱动组件包括有:
6.根据权利要求5所述的一种夹爪,其特征在于,所述驱动组件还包括有一固定连接在所述驱动气缸活塞杆之上的联动板,两个所述连杆的上端枢接在所述联动板之上。
7.根据权利要求5所述一种夹爪,其特征在于,所述夹紧臂包括相互构成有一夹角的第一段和第二段,所述连杆下端转动连接在所述夹紧臂的拐角处。
8.根据权利要求5所述的一种夹爪,其特征在于,所述驱动组件还包括有限位单元,用以限制所述驱动气缸活塞杆最大推出行程,所述限位单元包括有限位板,所述限位板设置于所述驱动气缸活塞杆向下伸出的移动路径之上,并通过连接杆固定连接在所述安装板之上。
9.根据权利要求8所述的一种夹爪,其特征在于,所述连接杆至少位于下段部分设置有螺纹,所述限位板之上开始有穿设于所述连接杆之上的通孔,且通过至少一个与所述连接杆螺栓连接的螺母装配在其上。
10.根据权利要求4所述的一种夹爪,其特征在于,其中一个底板与所述夹紧臂的下端转动连接,且其转轴的轴线与所述夹紧臂与所述安装板的枢接轴轴线相互并排。
技术总结
一种夹爪,包括有一安装板,还包括有:夹紧臂,所述夹紧臂为两个,且其上端分别枢接在所述安装板两个相对端部;爪部,所述爪部为相互对置的两个,分别装设在两个夹紧臂的下端之上,且两个所述爪部相互对应的端面之上均装配有两个沿上下方向并排的夹紧齿,两个所述夹紧齿之间构成容纳空间;驱动组件,所述驱动组件装设在所述安装板之上,用以同时驱动两个所述夹紧臂沿枢轴摆动,进而带动所述爪部实现夹紧以及放松动作。本夹爪能够对不能直接包覆在两个爪部之内的大直径目标物进行抓取,并且使得夹爪与目标物之间具有较高的夹紧稳定性。
技术研发人员:肖大放
受保护的技术使用者:东莞市大研自动化设备有限公司
技术研发日:20230327
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!