一种全向移动四轴吸盘机械臂
本技术涉及机械臂,尤其涉及一种全向移动四轴吸盘机械臂。
背景技术:
1、机械臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
2、机械臂根据结构形式的不同分为多关节机械臂,直角坐标系机械臂,球坐标系机械臂,极坐标机械臂,柱坐标机械臂等。目前物流行业普遍采用三轴机械臂,三轴机械臂是由三个伺服电机组成的机械手臂,它能够在x、y、z轴方向上分别独立的运行,三轴机械臂其基本作用是将手爪移动到所需位置和承受手抓抓取物件的最大重量,以及机械臂本身的重量。
3、现有的物流机械臂至少存在如下缺陷与不足:无法全向移动,转向极其容易带来误差,无法实现多维度、多空间地形的移动;采用机械爪,机械爪重量大,结构复杂;仅能在x、y、z轴方向上分别独立的运行,机械爪活动范围受限。
技术实现思路
1、为了克服上述现有技术的不足,本实用新型提供一种全向移动四轴吸盘机械臂。自重轻,结构精简,活动范围不受限,而且能够实现多维度、多空间地形的全向移动。
2、为了达到上述目的,本实用新型采用以下技术方案实现:
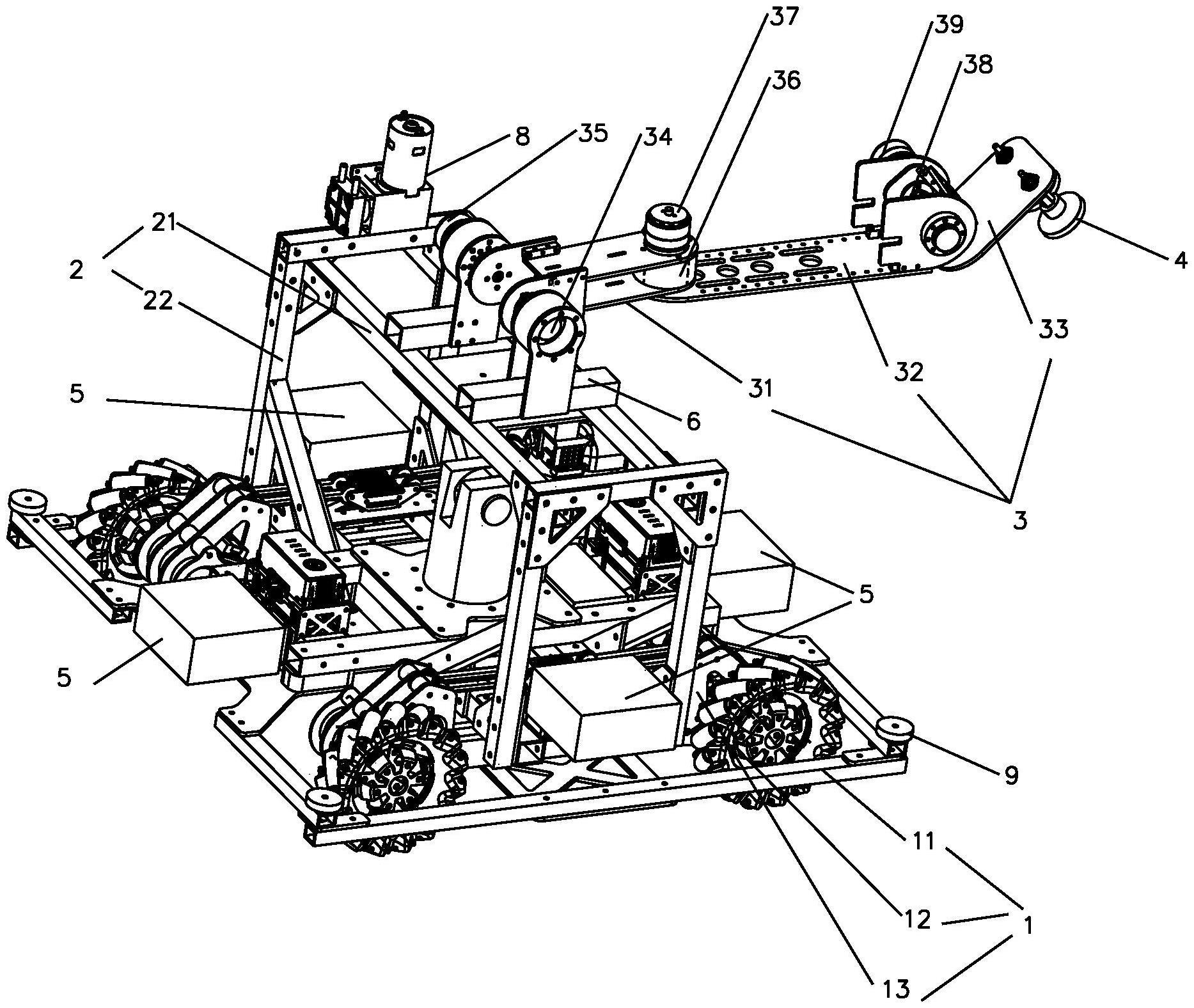
3、一种全向移动四轴吸盘机械臂,包括移动小车、四轴机械臂与吸盘;移动小车的车轮采用麦克纳姆轮;四轴机械臂包括摇臂、上臂与前臂;摇臂一端通过第一转轴铰接在移动小车上,摇臂的另一端通过第二转轴与上臂的一端铰接,第三转轴铰接在上臂的另一端,第四转轴铰接在第三转轴上;前臂固接在第四转轴上;吸盘固接在前臂上。
4、作为本实用新型技术方案的进一步改进与优化:移动小车包括车架、车轮与电机;车架为矩形框架,四个车轮安装在车架的四角,每个车轮用独立的电机驱动。
5、作为本实用新型技术方案的进一步改进与优化:还包括防撞胶轮,四个防撞胶轮安装在车架的四角。
6、作为本实用新型技术方案的进一步改进与优化:还包括传感器,至少四个传感器固接在车架四周。
7、作为本实用新型技术方案的进一步改进与优化:还包括门型框架,所述门型框架固接在移动小车上。
8、作为本实用新型技术方案的进一步改进与优化:第一转轴与第一电机相连,第一电机带动第一转轴旋转;第二转轴与第二电机相连,第二电机带动第二转轴旋转;第三转轴与第三电机相连接,第三电机带动第三转轴旋转;第四转轴与第四电机相连,第四电机带动第四转轴旋转。
9、作为本实用新型技术方案的进一步改进与优化:吸盘为双层橡胶吸盘。
10、作为本实用新型技术方案的进一步改进与优化:还包括摄像机,所述摄像机固接在移动小车上,采用分辨率在1080p以上的摄像机。
11、作为本实用新型技术方案的进一步改进与优化:吸盘以可拆卸方式固接在前臂上。
12、作为本实用新型技术方案的进一步改进与优化:吸盘通过螺栓固接在前臂上。
13、与现有技术相比,本实用新型提供的一个或多个技术方案至少具有如下技术效果与优点:
14、1、本实用新型将机械臂的机械手改进为吸盘,减轻机械臂自身负担,简化机构。本实用新型将三轴机构改进为四轴机构,四轴机构满足更大活动范围,实现更大限度的吸取目标物体,实现高速取放作业。
15、2、本实用新型移动小车采用麦克纳姆轮,能够全向移动,避免了转向带来的误差,提高了效率,实现多维度、多空间地形的移动。
16、3、本实用新型设有分辨率在1080p以上的高清摄像机,便于实现快速识别和吸取目标物体。
17、4、本实用新型至少四个传感器安装在车架的四周;底部移动部分四周布控传感器,加大机械臂的灵活性。
技术特征:
1.一种全向移动四轴吸盘机械臂,其特征在于:
2.根据权利要求1所述的一种全向移动四轴吸盘机械臂,其特征在于:
3.根据权利要求2所述的一种全向移动四轴吸盘机械臂,其特征在于:
4.根据权利要求2所述的一种全向移动四轴吸盘机械臂,其特征在于:
5.根据权利要求1所述的一种全向移动四轴吸盘机械臂,其特征在于:
6.根据权利要求1所述的一种全向移动四轴吸盘机械臂,其特征在于:
7.根据权利要求1所述的一种全向移动四轴吸盘机械臂,其特征在于:
8.根据权利要求1所述的一种全向移动四轴吸盘机械臂,其特征在于:
9.根据权利要求1所述的一种全向移动四轴吸盘机械臂,其特征在于:
10.根据权利要求9所述的一种全向移动四轴吸盘机械臂,其特征在于:
技术总结
本技术涉及机械臂技术领域,尤其涉及一种全向移动四轴吸盘机械臂。包括移动小车、四轴机械臂与吸盘;移动小车的车轮采用麦克纳姆轮;四轴机械臂包括摇臂、上臂与前臂;摇臂一端通过第一转轴铰接在移动小车上,摇臂的另一端通过第二转轴与上臂的一端铰接,第三转轴铰接在上臂的另一端,第四转轴铰接在第三转轴上;前臂固接在第四转轴上;吸盘固接在前臂上。自重轻,结构精简,活动范围不受限,而且能够实现多维度、多空间地形的全向移动。
技术研发人员:田耀鹏,牛冰冰,卢春玲,王彪,邱东超
受保护的技术使用者:辽宁科技大学
技术研发日:20230324
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!