一种机械手器具的制作方法
本技术涉及机械臂领域,尤其涉及一种机械手器具。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
2、目前的机械手上只具备有单一的固体物品抓取的功能效果,在搬运液体方面效果有限,导致机械手的使用受限,因此需要装置使机械手能同时具备有对固体和液体的搬运的功能效果,提高机械手的多功能性。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种机械手器具。
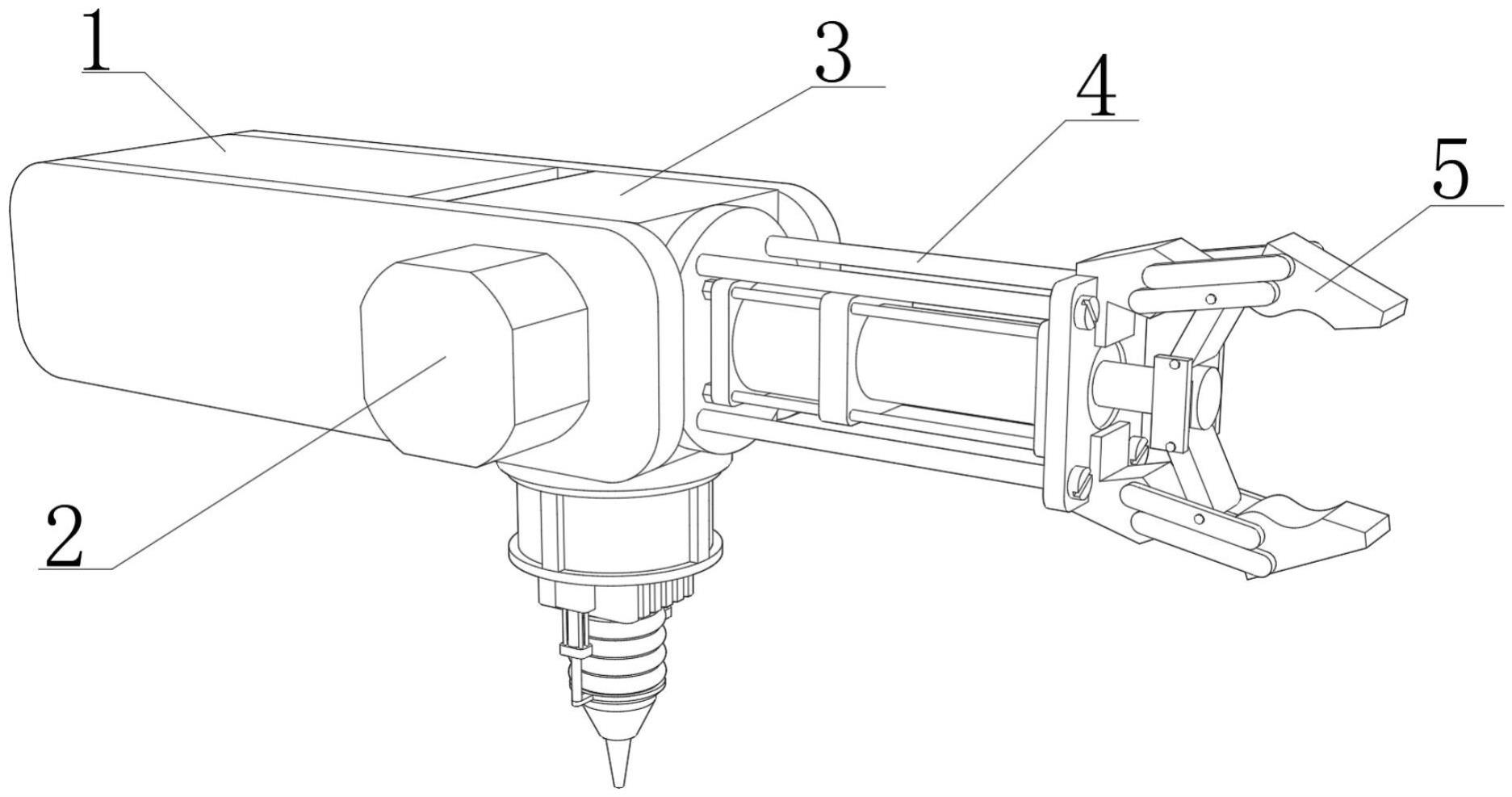
2、为了实现上述目的,本实用新型采用了如下技术方案:一种机械手器具,包括机械臂,所述机械臂前端左侧中间位置处固定连接有舵机,所述舵机输出端贯穿并固定连接有转换座,所述转换座前侧中心位置处固定连接有抓取控制装置,所述抓取控制装置前端设置有机械抓手,所述转换座底部中心位置处固定连接有连接座,所述连接座底部中心位置处固定连接有水槽,所述水槽外径上设置有透明视窗,所述水槽底部中心位置处贯穿并固定连接有双向水泵,所述双向水泵底部输出端固定连接有伸缩管,所述伸缩管底端固定连接有吸液头,所述水槽底部左右两端均固定连接有电动伸缩杆,所述电动伸缩杆底部之间固定连接有同步套。
3、作为上述技术方案的进一步描述:
4、所述伸缩管底端贯穿同步套中间位置处并固定连接。
5、作为上述技术方案的进一步描述:
6、所述水槽能通过透明视窗来查看到内部情况。
7、作为上述技术方案的进一步描述:
8、所述电动伸缩杆分别设置于双向水泵左右两侧并固定连接。
9、作为上述技术方案的进一步描述:
10、所述舵机最大旋转角度为度。
11、作为上述技术方案的进一步描述:
12、所述舵机输出端贯穿进机械臂右侧并转动连接。
13、作为上述技术方案的进一步描述:
14、所述转换座左右两侧分别与机械臂之间转动连接。
15、本实用新型具有如下有益效果:
16、本实用新型中,首先驱动舵机带动输出端的转换座进行转动,转动的过程中会将下方的吸液头移动至机械臂前方代替掉机械抓手,之后在吸取液体时,将吸液头伸入进需要搬运的液体中,然后驱动双向水泵将液体从吸液头处吸入并输送进水槽中存放,在吸取液体的同时可通过电动伸缩杆来控制伸缩管伸长,方便吸液头对一些位置较深的液体进行吸取,之后控制机械臂将水槽中的液体进行移动至指定位置处,然后反向运行水泵将水槽中的液体抽取中并通过吸液头喷洒至指定位置处完成液体的搬运,本装置通过将机械抓手和吸液头之间进行换位代替,使机械臂具备有功能多样性效果,实用性强,并且机械抓手和吸液头之间的换位简单快捷。
技术特征:
1.一种机械手器具,包括机械臂(1),其特征在于:所述机械臂(1)前端左侧中间位置处固定连接有舵机(2),所述舵机(2)输出端贯穿并固定连接有转换座(3),所述转换座(3)前侧中心位置处固定连接有抓取控制装置(4),所述抓取控制装置(4)前端设置有机械抓手(5),所述转换座(3)底部中心位置处固定连接有连接座(6),所述连接座(6)底部中心位置处固定连接有水槽(7),所述水槽(7)外径上设置有透明视窗(8),所述水槽(7)底部中心位置处贯穿并固定连接有双向水泵(9),所述双向水泵(9)底部输出端固定连接有伸缩管(10),所述伸缩管(10)底端固定连接有吸液头(11),所述水槽(7)底部左右两端均固定连接有电动伸缩杆(12),所述电动伸缩杆(12)底部之间固定连接有同步套(13)。
2.根据权利要求1所述的一种机械手器具,其特征在于:所述伸缩管(10)底端贯穿同步套(13)中间位置处并固定连接。
3.根据权利要求1所述的一种机械手器具,其特征在于:所述水槽(7)能通过透明视窗(8)来查看到内部情况。
4.根据权利要求1所述的一种机械手器具,其特征在于:所述电动伸缩杆(12)分别设置于双向水泵(9)左右两侧并固定连接。
5.根据权利要求1所述的一种机械手器具,其特征在于:所述舵机(2)最大旋转角度为90度。
6.根据权利要求1所述的一种机械手器具,其特征在于:所述舵机(2)输出端贯穿进机械臂(1)右侧并转动连接。
7.根据权利要求1所述的一种机械手器具,其特征在于:所述转换座(3)左右两侧分别与机械臂(1)之间转动连接。
技术总结
本技术公开了一种机械手器具,包括机械臂,所述机械臂前端左侧中间位置处固定连接有舵机,所述舵机输出端贯穿并固定连接有转换座,所述转换座前侧中心位置处固定连接有抓取控制装置,所述抓取控制装置前端设置有机械抓手,所述转换座底部中心位置处固定连接有连接座,所述连接座底部中心位置处固定连接有水槽和透明视窗,所述水槽底部中心位置处贯穿并固定连接有双向水泵,所述双向水泵底部输出端固定连接有伸缩管,所述伸缩管底端固定连接有吸液头,所述水槽底部左右两端均固定连接有电动伸缩杆和同步套。本技术中,使机械手具备有两种搬运方式,提高机械手的实用性以及多功能效果。
技术研发人员:李刚
受保护的技术使用者:天津铭鑫汽车技术有限公司
技术研发日:20230327
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!