一种高自由度三轴机械手的制作方法
本技术涉及机械手,特别涉及一种高自由度三轴机械手。
背景技术:
1、机械手是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,现有的机械手仅具备在x、y、z三轴上进行运动,当机械手的使用环境发生变化,且需要机械手在更多的角度进行抓取物品时,现有的机械手无法完成上述的抓取操作,导致机械手的实用性下降。
技术实现思路
1、为达到上述目的,本实用新型提供以下技术方案:
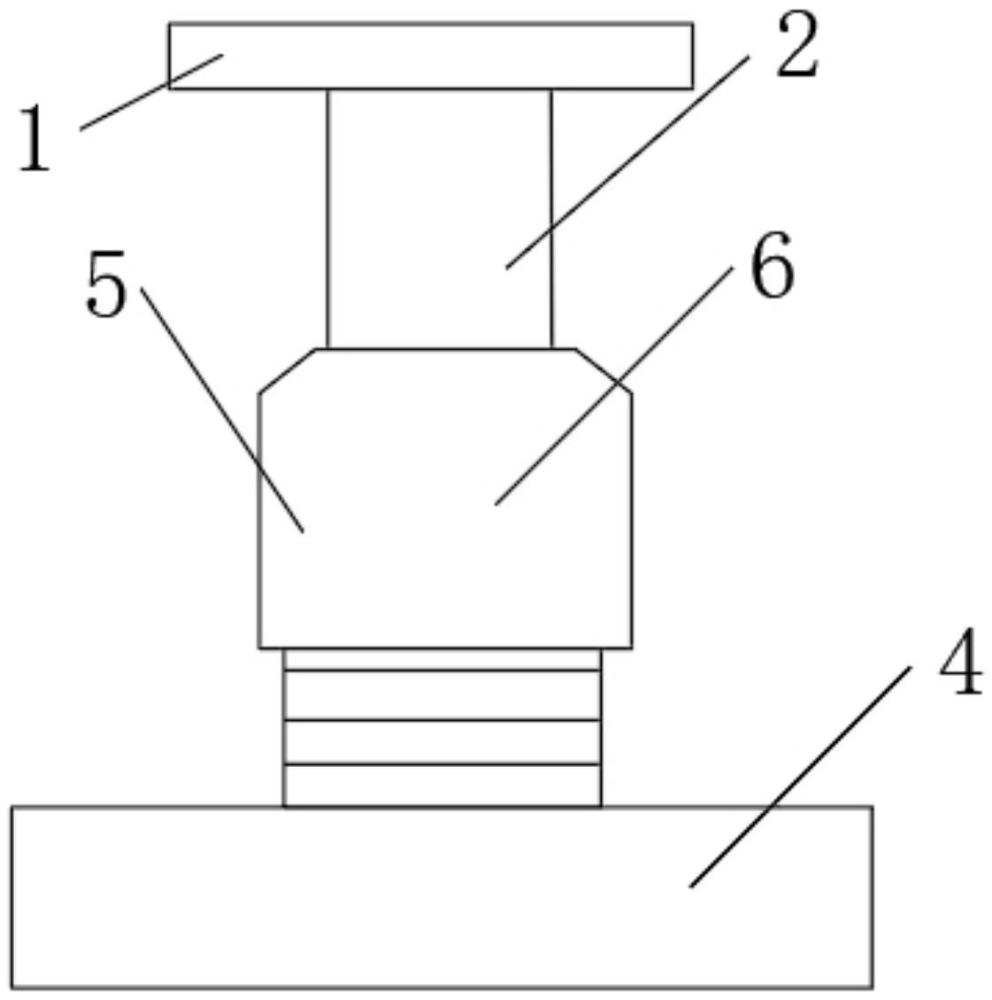
2、本实用新型提供一种高自由度三轴机械手,包括:机械手本体、支撑杆、转向结构、锁紧结构;
3、所述支撑杆用于支撑所述机械手本体,所述转向结构设置于所述支撑杆远离所述机械手本体的一端,所述锁紧结构用于锁紧所述转向结构;
4、所述转向结构包括转向球与安装座,所述安装座上开设有与所述转向球相切的转向槽,所述安装座用于与所述锁紧结构配合。
5、本申请增加设置有转向球,并增加有带有转向槽的安装座,在需要改变支撑杆的转动角度时,工作人员仅需要锁紧结构不再锁紧转向球,即可将转向球在转向槽的内部转动,待到支撑杆的转动角度合适后,使用锁紧结构将转向球锁紧,即可实现改变支撑杆角度的技术效果,在上述的过程中,支撑杆的角度可以相对于安装座倾斜设置,进而增加了支撑杆角度的选择,在现有的机械手本体在x、y、z三角度运动的同时,额外增加了倾斜设置的角度,增加了实用性。
6、在一些实施例中,所述锁紧结构包括锁紧螺母,所述锁紧螺母上开设有用于容纳所述支撑杆的容纳孔,所述安装座上设置有与所述锁紧螺母配合的螺纹结构。
7、在一些实施例中,所述容纳孔的直径小于所述转向球的直径。
8、在一些实施例中,所述支撑杆与所述转向球为一体式结构。
技术特征:
1.一种高自由度三轴机械手,其特征在于,包括:机械手本体、支撑杆、转向结构、锁紧结构;所述支撑杆用于支撑所述机械手本体,所述转向结构设置于所述支撑杆远离所述机械手本体的一端,所述锁紧结构用于锁紧所述转向结构;
2.根据权利要求1所述的高自由度三轴机械手,其特征在于,所述锁紧结构包括锁紧螺母,所述锁紧螺母上开设有用于容纳所述支撑杆的容纳孔,所述安装座上设置有与所述锁紧螺母配合的螺纹结构。
3.根据权利要求2所述的高自由度三轴机械手,其特征在于,所述容纳孔的直径小于所述转向球的直径。
4.根据权利要求1所述的高自由度三轴机械手,其特征在于,所述支撑杆与所述转向球为一体式结构。
技术总结
本技术涉及机械手技术领域,特别涉及一种高自由度三轴机械手,包括:机械手本体、支撑杆、转向结构、锁紧结构,所述支撑杆用于支撑所述机械手本体,所述转向结构设置于所述支撑杆远离所述机械手本体的一端,所述锁紧结构用于锁紧所述转向结构,所述转向结构包括转向球与安装座,所述安装座上开设有与所述转向球相切的转向槽,所述安装座用于与所述锁紧结构配合,在上述的过程中,支撑杆的角度可以相对于安装座倾斜设置,进而增加了支撑杆角度的选择,在现有的机械手本体在X、Y、Z三角度运动的同时,额外增加了倾斜设置的角度,增加了实用性。
技术研发人员:安雷贵
受保护的技术使用者:立世乐(天津)智能装备有限公司
技术研发日:20230328
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!