一种用于机器人浮动夹爪装置的制作方法
本技术涉及机器人浮动夹爪领域,具体涉及一种用于机器取料机构人浮动夹爪装置。
背景技术:
1、随着工业机器人的快速发展,工业机器人的需求量逐年增加,机器人末端夹爪作为机器人集成过程中的最关键部件之一,其质量影响整个机器人的产品性能输出,其中真空吸附是最重要的夹爪形式之一。传统的机器人夹爪主要采用刚性结构,由于很多工件来料和工件料盘都采用焊接或注塑成型工艺,工件和料盘的一致性很难保证,尤其是高度方向,这样就会导致在机器人取工件过程中,导致夹爪与产品表面之间的无法紧密紧贴,工件与夹爪之间缝隙过大或过小,导致抓取失败。
2、针对这一现状,迫切需要开发一种用于机器人浮动夹爪装置,以满足现场的实际使用的需要,提高产品抓取成功率,提升装配精度,进而提升产品质量。
技术实现思路
1、本实用新型克服了现有技术的不足,提供一种用于机器人浮动夹爪装置,具有结构简单、投资成本低、具有压力反馈的功能,解决了上述现有装配过程中存在的工件和工件料盘一致性差,无法保证来料一致性问题。
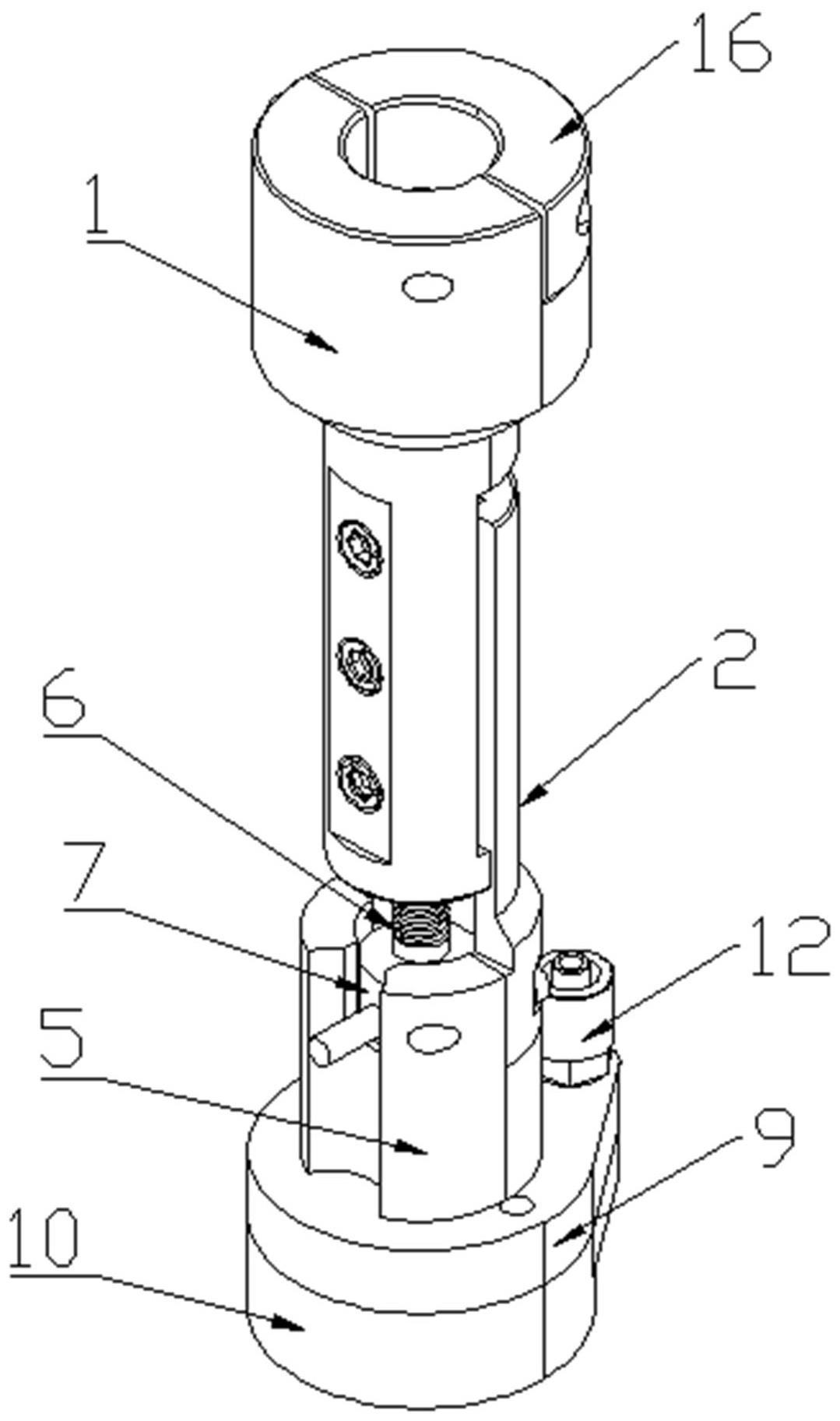
2、为达到上述目的,本实用新型采用的技术方案为:一种用于机器人浮动夹爪装置,包括连接杆一和连接杆二,所述连接杆一上设置有直线滑轨,所述连接杆二纵向滑动设置在所述直线滑轨上,所述连接杆一与所述连接杆二之间设置有浮动机构,所述连接杆二的端部还设置有用于真空吸附产品的若干个取料结构。
3、本实用新型一个较佳实施例中,所述浮动机构包括设置于连接杆一上的限位孔、嵌设在所述限位孔内的弹簧和嵌设在所述连接杆二内的压力传感器;
4、所述弹簧的一端嵌设入所述限位孔中,所述弹簧的另一端与所述压力传感器抵靠。
5、本实用新型一个较佳实施例中,所述取料结构包括安装在连接杆二上的连接座、安装在连接座上的安装板一和安装在安装板一上的安装板二,所述安装板一上设置有气流槽,所述安装板一上还设置有与所述气流槽连通的管接头,所述安装板二上组装嵌设有多个与所述气流槽连接的橡胶吸嘴。
6、本实用新型一个较佳实施例中,所述安装板一和连接座上分别设置有多个同轴且对称分布的对位孔,多个所述对位孔内嵌设有对位杆。
7、本实用新型一个较佳实施例中,所述连接杆一上还设置有能相对所述连接杆一开合的夹紧块。
8、本实用新型一个较佳实施例中,所述连接杆一的一端设置有与所述连接杆二一侧抵靠的凸台。
9、本实用新型一个较佳实施例中,所述夹紧块为弧心开槽的半圆弧形,与所述连接杆一嵌合成管状。
10、本实用新型解决了背景技术中存在的缺陷,本实用新型的有益效果:
11、 (1)、可以实现装配过程中的压力反馈,满足高精度的装配需求;
12、 (2)、装置简单,结构合理,有效的节约设备成本;
13、 (3)、可以有效的吸收产品本身误差,降低来料要求,提升设备的稳定性;
14、 (4)、兼容性强,装置通用性强,既可以用于四轴机器人末端使用,也可以用于其他的运动模组,应用范围广。
技术特征:
1.一种用于机器人浮动夹爪装置,包括连接杆一(1)和连接杆二(2),其特征在于:所述连接杆一(1)上设置有直线滑轨(3),所述连接杆二(2)纵向滑动设置在所述直线滑轨(3)上,所述连接杆一(1)与所述连接杆二(2)之间设置有浮动机构,所述连接杆二(2)的端部还设置有用于真空吸附产品的若干个取料结构。
2.根据权利要求1所述的一种用于机器人浮动夹爪装置,其特征在于:所述浮动机构包括设置于连接杆一(1)上的限位孔(5)、嵌设在所述限位孔(5)内的弹簧(6)和嵌设在所述连接杆二(2)内的压力传感器(7);
3.根据权利要求1所述的一种用于机器人浮动夹爪装置,其特征在于:所述取料结构包括安装在连接杆二(2)上的连接座(8)、安装在连接座(8)上的安装板一(9)和安装在安装板一(9)上的安装板二(10),所述安装板一(9)上设置有气流槽(11),所述安装板一(9)上还设置有与所述气流槽(11)连通的管接头(12),所述安装板二(10)上组装嵌设有多个与所述气流槽(11)连接的橡胶吸嘴(13)。
4.根据权利要求3所述的一种用于机器人浮动夹爪装置,其特征在于:所述安装板一(9)和连接座(8)上分别设置有多个同轴且对称分布的对位孔(14),多个所述对位孔(14)内嵌设有对位杆(15)。
5.根据权利要求1所述的一种用于机器人浮动夹爪装置,其特征在于:所述连接杆一(1)上还设置有能相对所述连接杆一(1)开合的夹紧块(16)。
6.根据权利要求1所述的一种用于机器人浮动夹爪装置,其特征在于:所述连接杆一(1)的一端设置有与所述连接杆二(2)一侧抵靠的凸台(17)。
7.根据权利要求5所述的一种用于机器人浮动夹爪装置,其特征在于:所述夹紧块(16)为弧心开槽的半圆弧形,与所述连接杆一(1)嵌合成管状。
技术总结
本技术涉及一种用于机器人浮动夹爪装置,包括连接杆一和连接杆二,所述连接杆一上设置有直线滑轨,所述连接杆二纵向滑动设置在所述直线滑轨上,所述连接杆一与所述连接杆二之间设置有浮动机构,所述连接杆二的端部还设置有用于真空吸附产品的若干个取料结构,本技术克服了现有技术的不足,提供一种用于机器人浮动夹爪装置,具有结构简单、投资成本低、具有压力反馈的功能,解决了上述现有装配过程中存在的工件和工件料盘一致性差,无法保证来料一致性问题。
技术研发人员:李江,高继良,李志凯
受保护的技术使用者:苏州新智机电工业有限公司
技术研发日:20230406
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!