一种可移动机器人上下料工作站的制作方法
本技术涉及机械生产,具体为一种可移动机器人上下料工作站。
背景技术:
1、在现代工业制造中,上下料机器人能满足“快速/大批量加工节拍”、“节省人力成本”、“提高生产效率”等要求,成为越来越多工厂的理想选择。上下料机器人系统具有高效率和高稳定性,可以满足不同种类产品的生产,对用户来说可以大大降低产业工人的劳动强度。
2、目前的机器人上下料项目中,机器人以及供料机等机构都是采用化学螺栓将其固定在底面上的方式,如遇设备更替、场地调整等变动时需要将地螺栓松开,将机器人、供料机等其他附件分别移动位置,新的位置确定后需重新在地面钻孔安装化学螺栓再将设备固定,且需要重新在机器人与供料机等附件之间确立坐标关系,现场重新布线。布局调整需花费较多时间,增加停机损失且会对场地地坪产生破坏。
技术实现思路
1、本实用新型的目的在于提供一种可移动机器人上下料工作站,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种可移动机器人上下料工作站,包括做工机构,所述做工构后侧表面设置有防倾斜机构。
3、所述做工机构包括框架底盘,所述框架底盘两侧均固定连接有调节地脚,所述调节地脚内螺纹连接有调节螺栓,所述调节地脚设置的数量为若干个,若干个所述调节地脚呈等间距分布于框架底盘两侧。
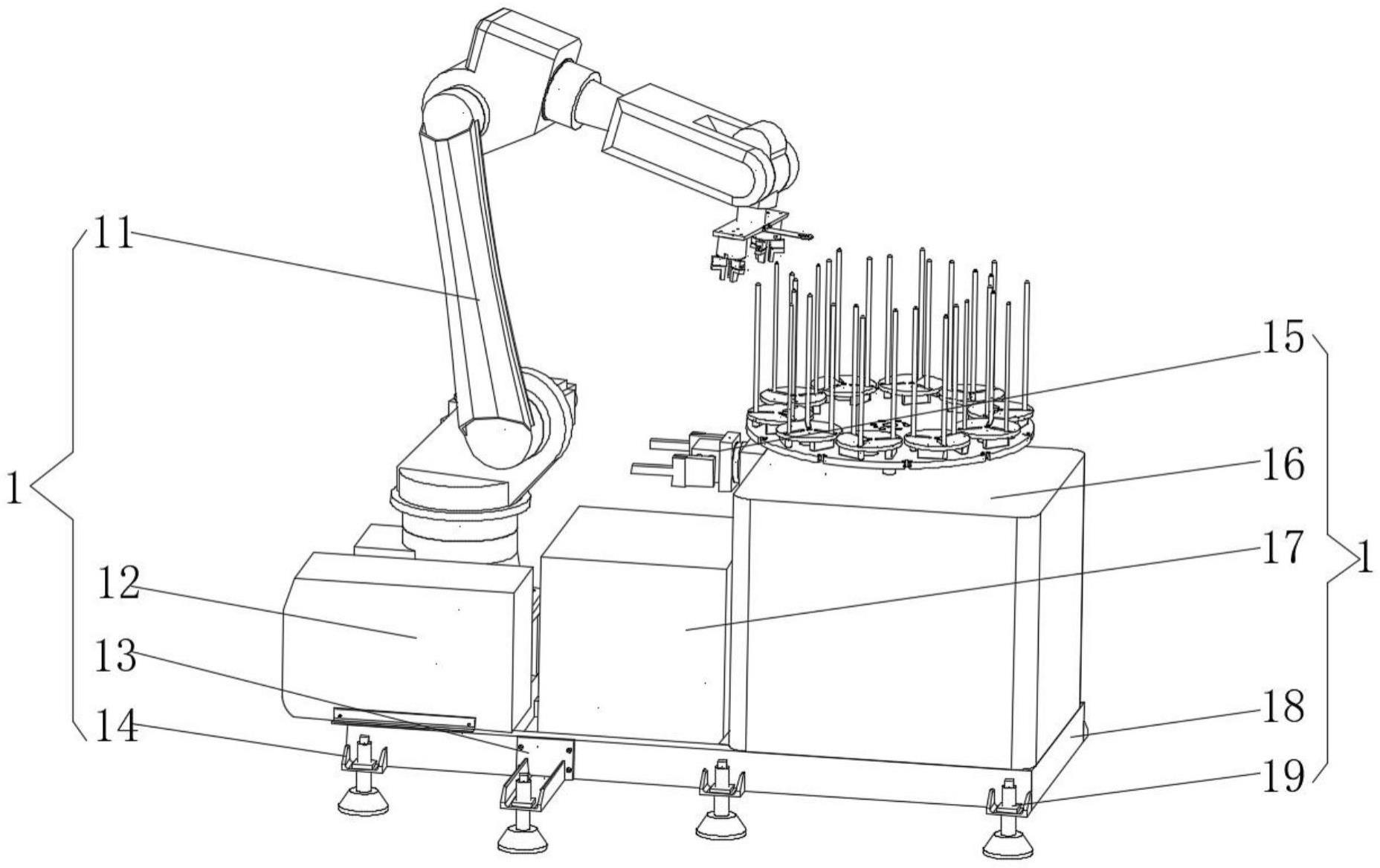
4、优选的,所述框架底盘顶部左侧固定连接有控制器,所述控制器顶部固定连接有机器人,所述机器人底部设置有翻转夹具,所述翻转夹具右侧固定连接有供料机,所述供料机固定连接于框架底盘顶部右侧,通过设置的翻转夹具,能够对物料进行翻转夹持固定。
5、优选的,所述框架底盘顶部中间固定连接有变压器,所述变压器设置于控制器和供料机之间,通过设置的控制器,能够对机器人进行的运行轨迹进行控制。
6、优选的,所述框架底盘两侧中间均固定连接有加长地脚,所述加长地脚内螺纹连接有调节螺栓,当机器人需要大臂展工作时可通过安装加长地脚来提高工作站的稳定性。
7、优选的,所述防倾斜机构包括支撑座,所述支撑座顶部两侧均固定连接有第一支撑板,两个所述第一支撑板前侧表面固定连接有弹性夹具,通过设置的弹性夹具,对透明容器起到夹持固定的目的。
8、优选的,所述弹性夹具内夹持有透明容器,所述透明容器设置的数量为三个,三个所述透明容器底部固定连接有连接管,通过设置的透明容器,能够确保该装置的稳定性。
9、优选的,所述支撑座顶部中间固定连接有第二支撑板,所述第二支撑板前侧表面固定连接有弹性夹具,通过设置的第一支撑板和第二支撑板,对弹性夹具起到固定的目的。
10、与现有技术相比,本实用新型提供了一种可移动机器人上下料工作站,具备以下有益效果:
11、1、该可移动机器人上下料工作站,通过设置的做工机构,将多个设备整合安装在一个底盘框架之中组成一个可移动工作站,底盘结构稳固,布线美观,结构紧凑,在需要重新布局时只需使用液压拖车便可轻松将工作站移动位置,新位置确定后不需要安装地脚螺栓固定,只需将六个可调地脚调平即可,设有可拆卸加长支撑脚,对于需要机器人大臂展工作时可起到稳固底盘的作用。无需为供料机与机器人建立坐标关系,当机床不需要工作站配合时可轻松将工作站移走,工作站与机床的信号线缆采用航空插头,可与任何一台使用相同标准接头的设备快速连接,节省编程调试时间,此方案缩短了设备停机调试时间,可快速组合自动化生产单元,不需要地脚螺栓固定,保护车间地坪整洁。
12、2、该可移动机器人上下料工作站,通过设置的防倾斜机构,通过转动调节螺栓,直至两侧的透明容器内部的溶液高度为一致,这就说明该工作站为平稳状态,提高了此装置的稳定性。
技术特征:
1.一种可移动机器人上下料工作站,包括做工机构(1),其特征在于:所述做工机构后侧表面设置有防倾斜机构(2);
2.根据权利要求1所述的一种可移动机器人上下料工作站,其特征在于:所述框架底盘(18)顶部左侧固定连接有控制器(12),所述控制器(12)顶部固定连接有机器人(11),所述机器人(11)底部设置有翻转夹具(15),所述翻转夹具(15)右侧固定连接有供料机(16),所述供料机(16)固定连接于框架底盘(18)顶部右侧。
3.根据权利要求2所述的一种可移动机器人上下料工作站,其特征在于:所述框架底盘(18)顶部中间固定连接有变压器(17),所述变压器(17)设置于控制器(12)和供料机(16)之间。
4.根据权利要求1所述的一种可移动机器人上下料工作站,其特征在于:所述框架底盘(18)两侧中间均固定连接有加长地脚(13),所述加长地脚(13)内螺纹连接有调节螺栓(19)。
5.根据权利要求1所述的一种可移动机器人上下料工作站,其特征在于:所述防倾斜机构(2)包括支撑座(26),所述支撑座(26)顶部两侧均固定连接有第一支撑板(22),两个所述第一支撑板(22)前侧表面固定连接有弹性夹具(21)。
6.根据权利要求5所述的一种可移动机器人上下料工作站,其特征在于:所述弹性夹具(21)内夹持有透明容器(24),所述透明容器(24)设置的数量为三个,三个所述透明容器(24)底部固定连接有连接管(25)。
7.根据权利要求5所述的一种可移动机器人上下料工作站,其特征在于:
技术总结
本技术涉及机械生产技术领域,且公开了一种可移动机器人上下料工作站,包括做工机构,所述做工构后侧表面设置有防倾斜机构。该可移动机器人上下料工作站,通过设置的做工机构,将多个设备整合安装在一个底盘框架之中组成一个可移动工作站,底盘结构稳固,布线美观,结构紧凑,在需要重新布局时只需使用液压拖车便可轻松将工作站移动位置,新位置确定后不需要安装地脚螺栓固定,只需将六个可调地脚调平即可,设有可拆卸加长支撑脚,对于需要机器人大臂展工作时可起到稳固底盘的作用。可与任何一台使用相同标准接头的设备快速连接,节省编程调试时间,此方案缩短了设备停机调试时间,不需要地脚螺栓固定,保护车间地坪整洁。
技术研发人员:卢敏,张铁奇
受保护的技术使用者:上海蓝强机械制造有限公司
技术研发日:20230406
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!