一种机器人机器爪垫板的制作方法
本申请属于机器人配件,尤其涉及一种机器人机器爪垫板。
背景技术:
1、目前,通过机器人实现攀爬、夹持物体已经成为自动化设备的常见功能,但机器人的机器爪在使用时,需要在机器爪表面增加凹槽或者垫板实现机器爪摩擦力的增加,进而使得机器爪能更好的抓住物体,但机器人的机器爪是否抓住了物体一直都没有相应的检测方案。
技术实现思路
1、本申请为了解决上述问题,本申请提供一种机器人机器爪垫板。
2、本申请的目的是提供一种机器人机器爪垫板,垫板主体的表面布置活动柱,当活动柱与物体接触时,活动柱被按压进而使得活动柱移动,活动柱后端的接触金属片会与纽扣电池的阴极和阳极连接在一起,进而使得纽扣电池为垫板主体表面的指示灯提供电能,使得指示灯亮起,标志着机器爪稳定的抓住物体。
3、为实现本申请的目的,本申请的技术方案为:
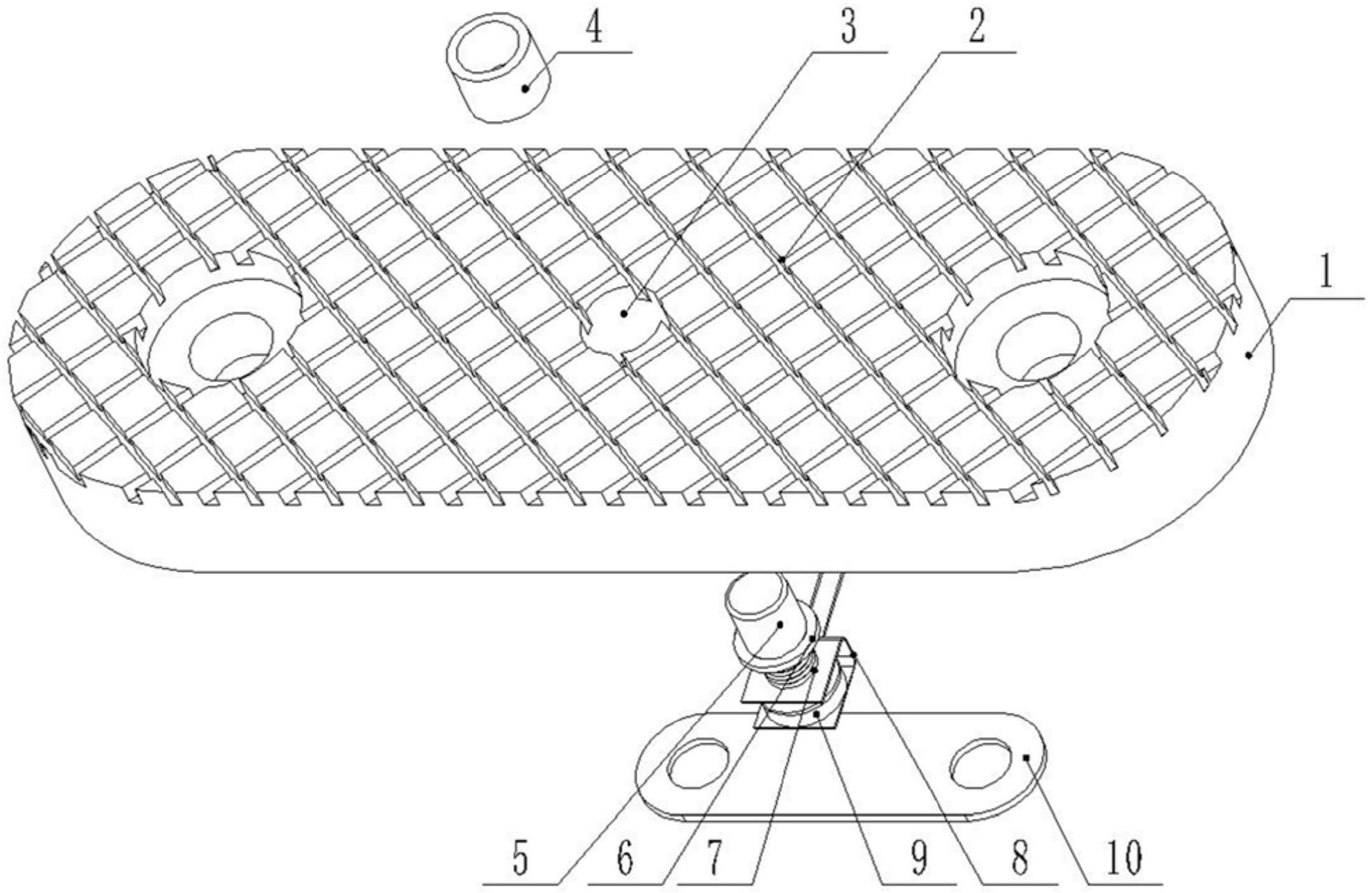
4、一种机器人机器爪垫板,包括垫板主体,垫板主体开设有通孔,通孔内活动设置有活动柱,活动柱后端设置有弹簧,弹簧位于通孔内,弹簧另一端连接接触金属片组,接触金属片组包括两块接触金属片,接触金属片之间设置有纽扣电池,一块接触金属片一端通过阴极导线连接指示灯,另一块接触金属片通过阳极导线连接指示灯,指示灯突出垫板主体。
5、进一步的,垫板主体上设置有防滑纹。
6、进一步的,通孔内设置有套筒,套筒外周与通孔内周过盈配合,活动柱穿设在套筒内。
7、进一步的,活动柱后端设置有挡板,挡板后端设置有连接柱,弹簧套设在连接柱上。
8、进一步的,接触金属片组后端设置有固定板,固定板固定在垫板主体上。
9、进一步的,通孔位于垫板主体的中心位置。
10、进一步的,接触金属片组呈“u”型,两块接触金属片通过金属连接板连接在一起。
11、进一步的,两块接触金属片之间的间隔大于纽扣电池的宽度。
12、与现有技术相比,本申请的有益效果为:
13、1、本申请在垫板主体的表面布置活动柱,当活动柱与物体接触时,活动柱被按压进而使得活动柱移动,活动柱后端的接触金属片会与纽扣电池的阴极和阳极连接在一起,进而使得纽扣电池为垫板主体表面的指示灯提供电能,使得指示灯亮起,为垫板与物体是否紧密接触提供量化标准。
技术特征:
1.一种机器人机器爪垫板,其特征在于,包括垫板主体(1),垫板主体(1)开设有通孔(3),通孔(3)内活动设置有活动柱(5),活动柱(5)后端设置有弹簧(7),弹簧(7)位于通孔(3)内,弹簧(7)另一端连接接触金属片组(8),接触金属片组(8)包括两块接触金属片,接触金属片之间设置有纽扣电池(9),一块接触金属片一端通过阴极导线(11)连接指示灯(13),另一块接触金属片通过阳极导线(12)连接指示灯(13),指示灯(13)突出垫板主体(1)。
2.如权利要求1所述的一种机器人机器爪垫板,其特征在于,所述垫板主体(1)上设置有防滑纹(2)。
3.如权利要求1所述的一种机器人机器爪垫板,其特征在于,所述通孔(3)内设置有套筒,套筒外周与通孔(3)内周过盈配合,活动柱(5)穿设在套筒内。
4.如权利要求1所述的一种机器人机器爪垫板,其特征在于,所述活动柱(5)后端设置有挡板(6),挡板(6)后端设置有连接柱(14),弹簧(7)套设在连接柱(14)上。
5.如权利要求1所述的一种机器人机器爪垫板,其特征在于,所述接触金属片组(8)后端设置有固定板(10),固定板(10)固定在垫板主体(1)上。
6.如权利要求1所述的一种机器人机器爪垫板,其特征在于,所述通孔(3)位于垫板主体(1)的中心位置。
7.如权利要求1所述的一种机器人机器爪垫板,其特征在于,所述接触金属片组(8)呈“u”型,两块接触金属片通过连接板连接在一起。
8.如权利要求1所述的一种机器人机器爪垫板,其特征在于,两块接触金属片之间的间隔大于纽扣电池(9)的宽度。
技术总结
本申请属于机器人配件技术领域,尤其涉及一种机器人机器爪垫板,包括垫板主体,垫板主体开设有通孔,通孔内活动设置有活动柱,活动柱后端设置有弹簧,弹簧位于通孔内,弹簧另一端连接接触金属片组,接触金属片组包括两块接触金属片,接触金属片之间设置有纽扣电池,一块接触金属片一端通过阴极导线连接指示灯,另一块接触金属片通过阳极导线连接指示灯,指示灯突出垫板主体,当活动柱与物体接触时,活动柱被按压进而使得活动柱移动,活动柱后端的接触金属片会与纽扣电池的阴极和阳极连接在一起,进而使得纽扣电池为垫板主体表面的指示灯提供电能,使得指示灯亮起,标志着机器爪稳定的抓住物体。
技术研发人员:赵艳生,孙钦诚,丁锦鹏,孙权荣,张涛,栾薇,郑宇轩,董冠樟,张蕾,王春来,翟纯波,李双学,翟朋修,翟纯全,崔帅,王坤
受保护的技术使用者:山东锐翊电力工程有限公司
技术研发日:20230407
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!