一种一出四全自动伺服旋牙取瓶机械手的制作方法
本技术涉及旋牙取瓶机构,具体为一种一出四全自动伺服旋牙取瓶机械手。
背景技术:
1、当前,机械手在各行各业都有广泛使用,随着人力成本的上升,机械手使用的规模出现了空前的高涨,旋转抓取机械手通常是由气动控制的旋转气缸来实现旋转的动作,但这种定位方式定位精度不高,不适合于对定位要求较高的场合;且其在实际使用过程中,生产成本较高,生产效率较低、设备稳定性较低,不能适应各种旋牙瓶,其取瓶定位不准,容易产生不良品,操作比较繁琐。
2、中国cn200920154332.x号实用新型专利一种取瓶机械手及使用该机械手的吹瓶机公开了一种简单的取瓶机械手,该机械手包括提升机构及与其相连的卸料机构。该机械手不含旋转机构,也不含瓶口夹持机构。通过提升机构带动卸料机构中卸料器,卸料器最终将产品从吹瓶机中卸掉。本实用新型的取瓶机械手设备简单快捷,节约的设备成本并节约了驱动该机械手的动力能源。大大提高了生产效率。同时本实用新型同时还提供了一种使用了该取瓶机械手的吹瓶机。该技术方案明确不含放置机构,造成适用面大幅度下降。
3、中国cn200420088735.6号实用新型专利一种吹瓶机的快速自动取瓶装置,公开了在一定盘外设有绕所述定盘转动的动盘,动盘上设有取瓶的机械手,所述机械手上的支点固定在动盘上,机械手的头端往外伸延,其尾端顶置于所述定盘的周边,所述尾端与支点之间的机械手上设置受力部位,该受力部位与动盘之间设置弹性件连接,所述定盘周边上设有供机械手的尾端滑行的弧形导轨。因而本实用新型具有结构简单、成本低、取瓶速度快、生产效率高且适合多工位转盘使用的优点。该技术方案将机械手设置于动盘上,导致整个取瓶机构过于复杂、联动太多,且占用空间大。
技术实现思路
1、本实用新型的目的在于提供一种一出四全自动伺服旋牙取瓶机械手,以解决上述背景技术中提出的问题。
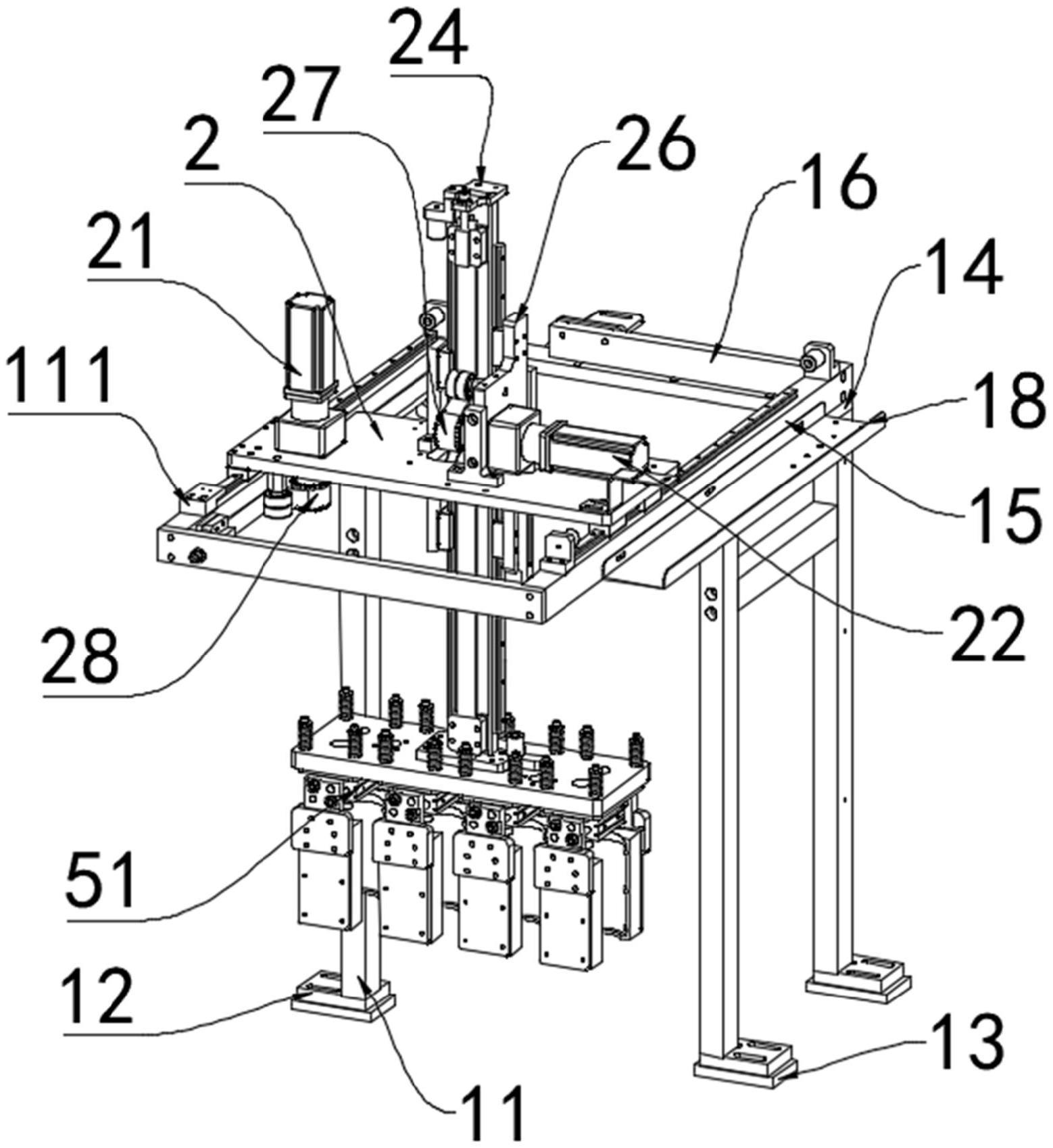
2、为实现上述目的,本实用新型提供如下技术方案:一种一出四全自动伺服旋牙取瓶机械手,包括设备主体,所述设备主体包括:
3、四个支撑柱,所述支撑柱的底端固定连接有下支撑板,所述下支撑板的底端固定连接有下垫板;
4、导轨安装板,所述导轨安装板的左上方固定连接有第一伺服电机,所述导轨安装板的右上方固定连接有第二伺服电机。
5、进一步地,所述支撑柱的顶端固定连接有上支撑板,所述上支撑板的顶端固定连接有滑台。
6、进一步地,所述滑台的前后两侧固定连接有固定板,所述滑台的左右上方固定连接有直线导轨,所述直线导轨与导轨安装板滑动连接。
7、进一步地,所述直线导轨的右侧固定连接有尼龙拖链支撑架,所述直线导轨的前后固定安装有限位块,所述直线导轨的左侧顶端固定设置有感应开关。
8、进一步地,所述直线导轨安装板中间贯穿有纵向滑轨,所述纵向滑轨与导轨安装板滑动连接,所述纵向滑轨与支撑柱固定连接。
9、进一步地,所述纵向滑轨的顶端活动连接有同步带调节板,所述同步带调节板的底端固定连接有第二限位座。
10、进一步地,所述纵向滑轨的右侧设置有伺服安装板,所述伺服安装板左侧活动连接有第一主动同步带轮,所述第一主动同步带轮与第二伺服电机的输出端固定连接。
11、进一步地,所述第一伺服电机的输出端固定连接有第二主动同步带轮。
12、进一步地,所述纵向滑轨的底端固定连接有升降板,所述升降板的顶端设置有若干个夹手导杆,所述升降板的底端固定连接有夹式气缸安装板。
13、进一步地,所述升降板的底端固定连接有若干个夹式气缸,所述夹式气缸的前端固定连接有安装杆,所述安装杆的下端固定连接有固定块,所述固定块的底端固定连接有夹手。
14、与现有技术相比,本实用新型的有益效果是:
15、1.通过设置设备主体,在使用时,使用人员通过设置感应开关,感应开关接收信号后,第二伺服电机向下移动,可以根据瓶身高度调节,能适应各种旋牙瓶,移动到指定位置后,通过设置夹式气缸,驱动取瓶夹手抱紧瓶身,第二伺服电机向上移动到原点,操作简单,易上手,其第一伺服电机向前移动,移动位置根据输送带位置调节,移动到指定位置后,通过设置第二伺服电机,向下移动,移动位置根据输送带位置调节,提高了设备的稳定性,杜绝不良品,移动到指定位置通过对夹式气缸松开取瓶夹手,第二伺服电机向上移动至原点取瓶位置,第一伺服电机向后移动至原点取瓶位置,取瓶定位准,速度较快,,降低生产成本,提高生产效率、提高生产质量,提升设备稳定性,有效增强装置的实用性;
16、2.在于生产中,能适应各种旋牙瓶,其取瓶定位准,速度快、效率高、杜绝不良品;操作简单,易上手,此结构为多零件拼接而成,取瓶夹手部分(图示)可更换调节,其取瓶一次可取多腔(适用于一腔、两腔、四腔、六腔、八腔、九腔等),适用节距为:76mm、100mm、114.3mm、130mm、150mm、196mm、200mm、220mm、260mm;适用瓶口:20mm~80mm。
技术特征:
1.一种一出四全自动伺服旋牙取瓶机械手,包括设备主体(1),其特征在于:所述设备主体(1)包括:
2.根据权利要求1所述的一种一出四全自动伺服旋牙取瓶机械手,其特征在于:所述支撑柱(11)的顶端固定连接有上支撑板(14),所述上支撑板(14)的顶端固定连接有滑台(15)。
3.根据权利要求2所述的一种一出四全自动伺服旋牙取瓶机械手,其特征在于:所述滑台(15)的前后两侧固定连接有固定板(16),所述滑台(15)的左右上方固定连接有直线导轨(17),所述直线导轨(17)与直线导轨安装板(2)滑动连接。
4.根据权利要求3所述的一种一出四全自动伺服旋牙取瓶机械手,其特征在于:所述直线导轨(17)的右侧固定连接有尼龙拖链支撑架(18),所述直线导轨(17)的前后固定安装有限位块(19),所述直线导轨(17)的左侧顶端固定设置有感应开关(111)。
5.根据权利要求1所述的一种一出四全自动伺服旋牙取瓶机械手,其特征在于:所述导轨安装板(2)中间贯穿有纵向滑轨(23),所述纵向滑轨(23)与导轨安装板(2)滑动连接,所述纵向滑轨(23)与支撑柱(11)固定连接。
6.根据权利要求5所述的一种一出四全自动伺服旋牙取瓶机械手,其特征在于:所述纵向滑轨(23)的顶端活动连接有同步带调节板(24),所述同步带调节板(24)的底端固定连接有第二限位座(25)。
7.根据权利要求5所述的一种一出四全自动伺服旋牙取瓶机械手,其特征在于:所述纵向滑轨(23)的右侧设置有伺服安装板(26),所述伺服安装板(26)左侧活动连接有第一主动同步带轮(27),所述第一主动同步带轮(27)与第二伺服电机(22)的输出端固定连接。
8.根据权利要求1所述的一种一出四全自动伺服旋牙取瓶机械手,其特征在于:所述第一伺服电机(21)的输出端固定连接有第二主动同步带轮(28)。
9.根据权利要求5所述的一种一出四全自动伺服旋牙取瓶机械手,其特征在于:所述纵向滑轨(23)的底端固定连接有升降板(29),所述升降板(29)的顶端设置有若干个夹手导杆(211),所述升降板的底端固定连接有夹式气缸安装板(212)。
10.根据权利要求9所述的一种一出四全自动伺服旋牙取瓶机械手,其特征在于:所述升降板(29)的底端固定连接有若干个夹式气缸(213),所述夹式气缸(213)的前端固定连接有安装杆(214),所述安装杆(214)的下端固定连接有固定块(215),所述固定块(215)的底端固定连接有夹手(216)。
技术总结
本技术涉及旋牙取瓶机构技术领域,公开了一种一出四全自动伺服旋牙取瓶机械手,包括设备主体,所述设备主体包括:四个支撑柱,所述支撑柱的底端固定连接有下支撑板,所述下支撑板的底端固定连接有下垫板,直线导轨安装板,所述直线导轨安装板的左上方固定连接有第一伺服电机,所述直线导轨安装板的右上方固定连接有第二伺服电机;通过设置感应开关,感应开关接收信号后,第二伺服电机向下移动,可以根据瓶身高度调节,能适应各种旋牙瓶,移动到指定位置后,通过设置夹式气缸,驱动取瓶夹手抱紧瓶身,通过设置第二伺服电机,向下移动,移动位置根据输送带位置调节,提高了设备的稳定性,杜绝不良品,有效增强装置的实用性。
技术研发人员:温振明
受保护的技术使用者:广东衡钢机械有限公司
技术研发日:20230407
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!