桁架机械手的制作方法
本技术涉及圆筒筒体加工产线,具体地,涉及一种桁架机械手。
背景技术:
1、泵车底架结构件圆筒筒体采用板料弯曲后焊接而成,圆筒筒体11结构如图1所示,其上具有缺口、圆孔、腰形孔等结构,该圆筒筒体11的对接焊缝为双面坡口焊接,圆筒筒体11上的缺口、圆孔、腰形孔等结构是在圆筒主体成型后切割成型。焊接好后的圆筒筒体11需要吊运至筒体翻边机工位进行下一步作业,而现有的圆筒筒体11的吊运工具在吊运圆筒筒体11时,不仅需要人工进行辅助作业,吊运工具自身的吊运效率也很低,影响圆筒筒体11的整体加工效率。
2、有鉴于此,需要设计一种桁架机械手,以解决或克服上述技术问题。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种桁架机械手,该桁架机械手能够便利地搬运筒体,减少人工作业,操作便捷,使用效果好。
2、为了解决上述技术问题,本实用新型提供一种桁架机械手,包括x轴系统总成、设置在所述x轴系统总成上的线性滑轨、与所述线性滑轨滑动连接的溜板总成、连接在所述溜板总成上的y轴系统总成、连接在所述y轴系统总成的远离所述溜板总成的一端且能够沿着上下方向移动的z轴升降臂以及连接在所述z轴升降臂的下端的伺服单臂抓手机构,所述伺服单臂抓手机构包括夹具体组件,所述夹具体组件上设有左右对称的夹爪组件、夹具丝杆组件以及与所述夹具丝杆组件连接的夹具驱动总成,所述夹具驱动总成能够驱动所述夹具丝杆组件转动,并驱动所述夹爪组件移动,以能够夹持和松开筒体。
3、作为本实用新型的一个优选实施方式,所述夹具体组件形成为箱体结构件,包括多个相互连接的连接杆以及固定连接在所述连接杆上的夹爪组件安装板。
4、优选地,所述夹爪组件包括左夹爪和右夹爪,所述左夹爪和所述右夹爪均形成为l型臂结构,且两个所述l型臂结构的自由端相向设置。
5、作为本实用新型的另一个优选实施方式,所述夹具丝杆组件包括第一丝杆、中间轴和第二丝杆,所述第一丝杆和所述中间轴之间、所述第二丝杆和所述中间轴之间均设有联结轴,所述中间轴的两端设有轴承座组件,所述第一丝杆的远离所述联结轴的一端以及所述第二丝杆的远离所述联结轴的一端均设有丝杆支撑座和丝杆螺母支撑座。
6、更优选地,其中一个所述轴承座组件和所述联结轴之间设有同步带轮。
7、进一步优选地,所述第一丝杆以及所述第二丝杆上均螺纹连接有夹爪安装座。
8、更进一步优选地,所述第一丝杆为左旋丝杆,所述第二丝杆为右旋丝杆。
9、作为本实用新型的一个具体结构形式,所述伺服单臂抓手机构还包括护罩,所述夹具驱动总成设置在所述护罩的上部,所述夹爪组件设置在所述护罩的下部,所述夹具体组件和所述夹具丝杆组件设于所述护罩的内部。
10、作为本实用新型的另一个具体结构形式,所述z轴升降臂与所述伺服单臂抓手机构间还设有气缸固定组件。
11、作为本实用新型的又一个具体结构形式,所述x轴系统总成的一端还铰接有设备检修平台,所述x轴系统总成的下部还连接有多个立柱。
12、通过上述技术方案,本实用新型的桁架机械手包括x轴系统总成、设置在所述x轴系统总成上的线性滑轨、与所述线性滑轨滑动连接的溜板总成、连接在所述溜板总成上的y轴系统总成、连接在所述y轴系统总成的远离所述溜板总成的一端且能够沿着上下方向移动的z轴升降臂以及连接在所述z轴升降臂的下端的伺服单臂抓手机构,所述伺服单臂抓手机构包括夹具体组件,所述夹具体组件上设有左右对称的夹爪组件、夹具丝杆组件以及与所述夹具丝杆组件连接的夹具驱动总成,所述夹具驱动总成能够驱动所述夹具丝杆组件转动,并驱动所述夹爪组件移动,以能够夹持和松开筒体。本实用新型的桁架机械手通过在x轴系统总成上设置线性滑轨,溜板总成滑动连接在线性滑轨上,溜板总成上设有y轴系统总成,而y轴系统总成的另一端设置z轴升降臂,z轴升降臂的下端设置伺服单臂抓手机构,从而能够通过溜板总成,实现伺服单臂抓手机构在x方向上的移动,z轴升降臂能够实现伺服单臂抓手机构在z方向上的移动,伺服单臂抓手机构能够夹持住圆筒筒体,从而满足圆筒筒体在x方向和z方向上的移动,结构简单,使用效果好。
13、有关本实用新型的其他优点以及优选实施方式的技术效果,将在下文的具体实施方式中进一步说明。
技术特征:
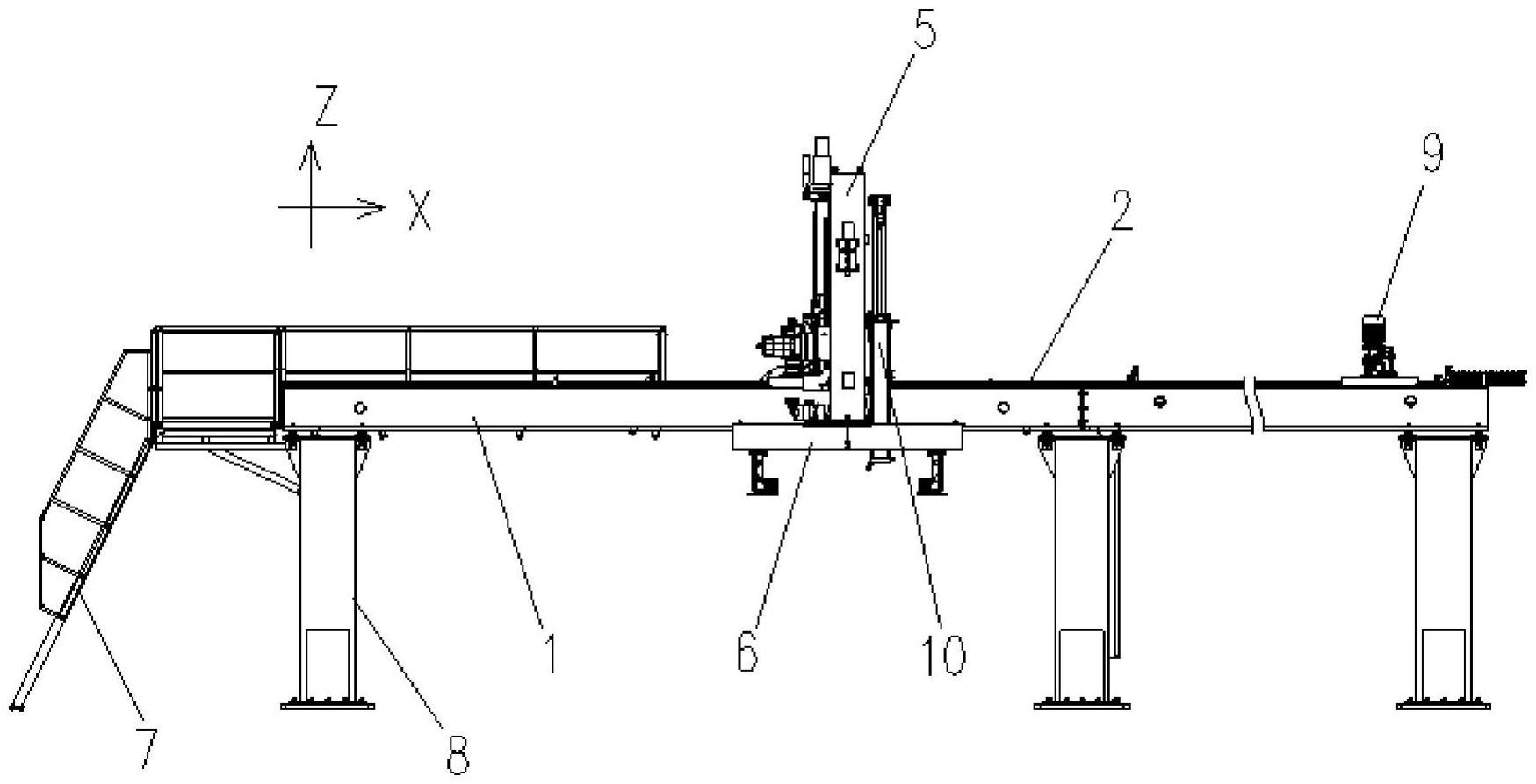
1.一种桁架机械手,其特征在于,包括x轴系统总成(1)、设置在所述x轴系统总成(1)上的线性滑轨(2)、与所述线性滑轨(2)滑动连接的溜板总成(3)、连接在所述溜板总成(3)上的y轴系统总成(4)、连接在所述y轴系统总成(4)的远离所述溜板总成(3)的一端且能够沿着上下方向移动的z轴升降臂(5)以及连接在所述z轴升降臂(5)的下端的伺服单臂抓手机构(6),所述伺服单臂抓手机构(6)包括夹具体组件(601),所述夹具体组件(601)上设有左右对称的夹爪组件(602)、夹具丝杆组件(603)以及与所述夹具丝杆组件(603)连接的夹具驱动总成(604),所述夹具驱动总成(604)能够驱动所述夹具丝杆组件(603)转动,并驱动所述夹爪组件(602)移动,以能够夹持和松开筒体。
2.根据权利要求1所述的桁架机械手,其特征在于,所述夹具体组件(601)形成为箱体结构件,包括多个相互连接的连接杆以及固定连接在所述连接杆上的夹爪组件安装板。
3.根据权利要求1所述的桁架机械手,其特征在于,所述夹爪组件(602)包括左夹爪和右夹爪,所述左夹爪和所述右夹爪均形成为l型臂结构,且两个所述l型臂结构的自由端相向设置。
4.根据权利要求1所述的桁架机械手,其特征在于,所述夹具丝杆组件(603)包括第一丝杆(6031)、中间轴(6032)和第二丝杆(6033),所述第一丝杆(6031)和所述中间轴(6032)之间、所述第二丝杆(6033)和所述中间轴(6032)之间均设有联结轴(6034),所述中间轴(6032)的两端设有轴承座组件(6035),所述第一丝杆(6031)的远离所述联结轴(6034)的一端以及所述第二丝杆(6033)的远离所述联结轴(6034)的一端均设有丝杆支撑座(6037)和丝杆螺母支撑座(6036)。
5.根据权利要求4所述的桁架机械手,其特征在于,其中一个所述轴承座组件(6035)和所述联结轴(6034)之间设有同步带轮(6038)。
6.根据权利要求4所述的桁架机械手,其特征在于,所述第一丝杆(6031)以及所述第二丝杆(6033)上均螺纹连接有夹爪安装座(6039)。
7.根据权利要求4所述的桁架机械手,其特征在于,所述第一丝杆(6031)为左旋丝杆,所述第二丝杆(6033)为右旋丝杆。
8.根据权利要求1至7中任一项所述的桁架机械手,其特征在于,所述伺服单臂抓手机构(6)还包括护罩(605),所述夹具驱动总成(604)设置在所述护罩(605)的上部,所述夹爪组件(602)设置在所述护罩(605)的下部,所述夹具体组件(601)和所述夹具丝杆组件(603)设于所述护罩(605)的内部。
9.根据权利要求1至8中任一项所述的桁架机械手,其特征在于,所述z轴升降臂(5)与所述伺服单臂抓手机构(6)间还设有气缸固定组件(10)。
10.根据权利要求1至8中任一项所述的桁架机械手,其特征在于,所述x轴系统总成(1)的一端还铰接有设备检修平台(7),另一端设有除尘机构(9),所述x轴系统总成(1)的下部还连接有多个立柱(8)。
技术总结
本技术涉及筒体输送设备,具体公开了一种桁架机械手,包括X轴系统总成、设置在X轴系统总成上的线性滑轨、与线性滑轨滑动连接的溜板总成、连接在溜板总成上的Y轴系统总成、连接在Y轴系统总成的远离溜板总成的一端且能够沿着上下方向移动的Z轴升降臂以及连接在Z轴升降臂的下端的伺服单臂抓手机构,伺服单臂抓手机构包括夹具体组件,夹具体组件上设有左右对称的夹爪组件、夹具丝杆组件以及与夹具丝杆组件连接的夹具驱动总成,夹具驱动总成能够驱动夹具丝杆组件转动,并驱动夹爪组件移动,以能够夹持和松开筒体。本技术的桁架机械手的结构简单,操作便捷,使用效果好。
技术研发人员:易伟,倪川皓,陈林,曹瑜琦,聂一彪
受保护的技术使用者:中联重科股份有限公司
技术研发日:20230412
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!