一种便于移动的采集机器人的制作方法
本技术涉及机器人领域,具体而言,涉及一种便于移动的采集机器人。
背景技术:
1、中国实用新型专利(申请号:cn202022841946.4)所提出的一种采集机器人,包括行走机构,所述行走机构包括行走轮、驱动电机和转向电机;采集机构,采集机构包括云台,所述云台上设有摄像头;主控模块,所述主控模块包括控制器、无线通信模块,所述控制器与无线通信模块、摄像头、驱动电机以及转向电机均电连接。
2、但是现有的采集机器人在使用的过程中存在一些不足之处需要进行改进,首先就是现有的采集机器人在进行采集夹持的过程中夹持容易出现滑落的情况,其次是现有的采集机器人在进行采集的过程中无法根据不同位置的需求进行位置的移动,因此我们对此做出改进,提出一种便于移动的采集机器人。
技术实现思路
1、本实用新型的目的在于:针对目前存在的背景技术提出的问题,为了实现上述实用新型目的,本实用新型提供了以下技术方案:一种便于移动的采集机器人,包括支承底台,所述支承底台底部外边上杆体固定有弧形底盘,所述弧形底盘表面吸附有移动底盘,且所述弧形底盘内部的杆体镶嵌在所述移动底盘顶部平面上,所述底部外边上转动安装有轮体轮架,所述轮体轮架的内部横向贯穿有转动轮轴,所述转动轮轴轴体表面嵌套有移动轮,且所述移动轮转动嵌入所述轮体轮架凹槽内。
2、作为本实用新型优选的技术方案,所述弧形底盘和所述轮体轮架均设有四个,所述弧形底盘依次安装在所述支承底台底面四角,而所述轮体轮架则设在所述移动底盘底面四角,同时每个所述轮体轮架内部均安装一个所述转动轮轴和所述移动轮。
3、作为本实用新型优选的技术方案,位于所述移动底盘后轮部的所述轮体轮架外边上设置有车轮刹车固定板扣,所述轮体轮架和所述车轮刹车固定板扣之间嵌有板扣轴。
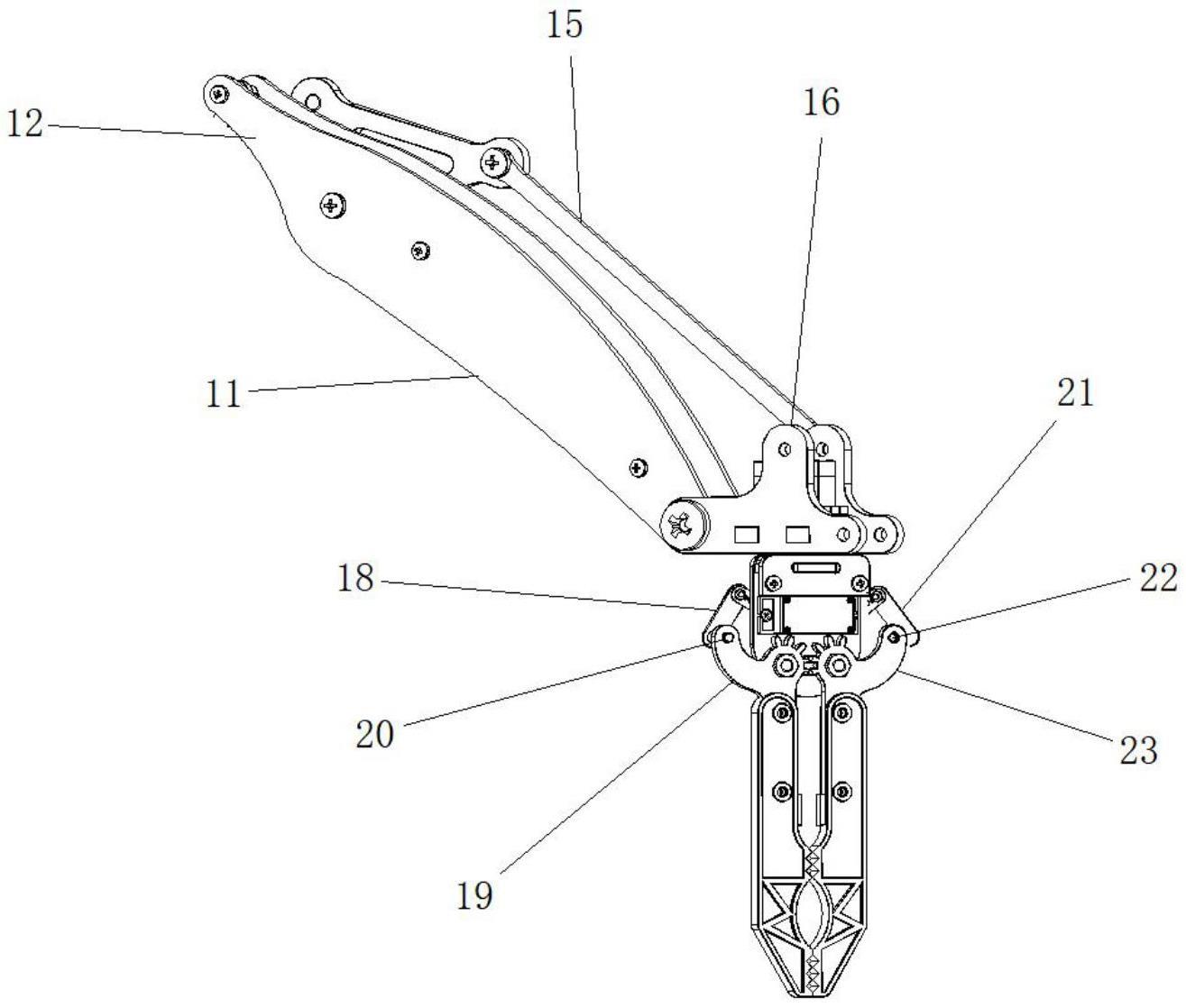
4、作为本实用新型优选的技术方案,所述支承底台的两边上方镶嵌有两个底架,所述底架之间轴体联动有l型主联动臂,所述l型主联动臂顶部轴体联动有副联动臂,所述副联动臂的尾部镶嵌有联动连杆,所述联动连杆杆体表面嵌有活动轴,所述活动轴外轴上设有关节杆,且所述关节杆另一端连接在所述l型主联动臂横杆部。
5、作为本实用新型优选的技术方案,所述联动连杆和所述关节杆均设有两个,之间相互对称,所述副联动臂端头凹槽内嵌有t型架,所述t型架顶端凹槽内转轴连接有副联动杆,所述副联动杆的另一端连接着另一个所述联动连杆,所述l型主联动臂和第二个所述联动连杆之间连接着另一个所述关节杆。
6、作为本实用新型优选的技术方案,所述t型架的底面固定有采集动力电机,所述采集动力电机的左侧转轴连接有第一动力连杆,所述第一动力连杆的下方设有第一动力弧形杆,所述第一动力连杆交点之间嵌有第一动力轴,所述采集动力电机的右侧转轴连接有第二动力连杆,所述第二动力连杆端头上嵌有第二动力轴,所述第二动力轴轴体表面嵌套有第二动力弧形杆。
7、作为本实用新型优选的技术方案,所述采集动力电机的下方设置有采集卡爪,且所述采集卡爪设有两个,一个与所述第一动力弧形杆相互连接,另一个则和所述第二动力弧形杆转轴联动,每个所述采集卡爪内边上均镶嵌一个卡爪防滑齿。
8、与现有技术相比,本实用新型的有益效果:
9、在本实用新型的方案中:
10、1.通过采集动力电机提供动力,带动第一动力连杆和第二动力连杆进行向前推动,第一动力弧形杆和第二动力弧形杆,通过推动第一动力弧形杆和第二动力弧形杆进而带动采集卡爪进行对物体加持采集,与此同时,通过设置的卡爪防滑齿在对物体采集的过程中增大了采集卡爪与物体表面的摩擦力,进而防止在夹持的过程中出现物体脱落的问题。
11、2.为了方便采集机器人可以根据不同的位置需求进行移动,通过在移动底盘的下方设置有轮体轮架,在轮体轮架中设置有移动轮,通过移动轮可使的采集机器人根据不同的位置移动需求进行移动。
技术特征:
1.一种便于移动的采集机器人,包括支承底台(1),其特征在于,所述支承底台(1)底部外边上杆体固定有弧形底盘(2),所述弧形底盘(2)表面吸附有移动底盘(3),且所述弧形底盘(2)内部的杆体镶嵌在所述移动底盘(3)顶部平面上,所述底部外边上转动安装有轮体轮架(4),所述轮体轮架(4)的内部横向贯穿有转动轮轴(5),所述转动轮轴(5)轴体表面嵌套有移动轮(6),且所述移动轮(6)转动嵌入所述轮体轮架(4)凹槽内。
2.根据权利要求1所述的一种便于移动的采集机器人,其特征在于,所述弧形底盘(2)和所述轮体轮架(4)均设有四个,所述弧形底盘(2)依次安装在所述支承底台(1)底面四角,而所述轮体轮架(4)则设在所述移动底盘(3)底面四角,同时每个所述轮体轮架(4)内部均安装一个所述转动轮轴(5)和所述移动轮(6)。
3.根据权利要求2所述的一种便于移动的采集机器人,其特征在于,位于所述移动底盘(3)后轮部的所述轮体轮架(4)外边上设置有车轮刹车固定板扣(7),所述轮体轮架(4)和所述车轮刹车固定板扣(7)之间嵌有板扣轴(8)。
4.根据权利要求3所述的一种便于移动的采集机器人,其特征在于,所述支承底台(1)的两边上方镶嵌有两个底架(9),所述底架(9)之间轴体联动有l型主联动臂(10),所述l型主联动臂(10)顶部轴体联动有副联动臂(11),所述副联动臂(11)的尾部镶嵌有联动连杆(12),所述联动连杆(12)杆体表面嵌有活动轴(14),所述活动轴(14)外轴上设有关节杆(13),且所述关节杆(13)另一端连接在所述l型主联动臂(10)横杆部。
5.根据权利要求4所述的一种便于移动的采集机器人,其特征在于,所述联动连杆(12)和所述关节杆(13)均设有两个,之间相互对称,所述副联动臂(11)端头凹槽内嵌有t型架(16),所述t型架(16)顶端凹槽内转轴连接有副联动杆(15),所述副联动杆(15)的另一端连接着另一个所述联动连杆(12),所述l型主联动臂(10)和第二个所述联动连杆(12)之间连接着另一个所述关节杆(13)。
6.根据权利要求5所述的一种便于移动的采集机器人,其特征在于,所述t型架(16)的底面固定有采集动力电机(17),所述采集动力电机(17)的左侧转轴连接有第一动力连杆(18),所述第一动力连杆(18)的下方设有第一动力弧形杆(19),所述第一动力连杆(18)交点之间嵌有第一动力轴(20),所述采集动力电机(17)的右侧转轴连接有第二动力连杆(21),所述第二动力连杆(21)端头上嵌有第二动力轴(22),所述第二动力轴(22)轴体表面嵌套有第二动力弧形杆(23)。
7.根据权利要求6所述的一种便于移动的采集机器人,其特征在于,所述采集动力电机(17)的下方设置有采集卡爪(24),且所述采集卡爪(24)设有两个,一个与所述第一动力弧形杆(19)相互连接,另一个则和所述第二动力弧形杆(23)转轴联动,每个所述采集卡爪(24)内边上均镶嵌一个卡爪防滑齿(25)。
技术总结
本技术提供了一种便于移动的采集机器人,包括支承底台,支承底台底部外边上杆体固定有弧形底盘,弧形底盘表面吸附有移动底盘,通过在移动底盘的下方设置有轮体轮架,在轮体轮架中设置有移动轮,通过移动轮可使的采集机器人根据不同的位置移动需求进行移动通过采集动力电机提供动力,带动第一动力连杆和第二动力连杆进行向前推动,第一动力弧形杆和第二动力弧形杆,通过推动第一动力弧形杆和第二动力弧形杆进而带动采集卡爪进行对物体加持采集,与此同时,通过设置的卡爪防滑齿在对物体采集的过程中增大了采集卡爪与物体表面的摩擦力,进而防止在夹持的过程中出现物体脱落的问题。
技术研发人员:胡雪松,韩磊,周国芳,黄尚弟
受保护的技术使用者:华际信息系统有限公司
技术研发日:20230414
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!