移动机器人的制作方法
本技术涉及机器人,尤其涉及一种移动机器人。
背景技术:
1、移动机器人是自动执行特定工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。这类移动机器人可用在室内或室外,可用于工业、商业或家庭,可用于取代保安巡视、取代迎宾员或点餐员、或取代人们清洁地面,还可用于家庭陪伴、辅助办公等。
2、移动机器人在工作模式下移动时,尤其是移动清洁机器人,其工作场景环境具有较大的复杂性。为了实现移动机器人的自主性,移动机器人需要拥有自主探索周边环境、构建可靠的环境地图并且在地图内定位其自身的能力。随着移动机器人的移动技术的更新迭代,利用相应的传感器(例如:红外传感器、超声波传感器、碰撞传感器、悬崖传感器等)所提供的移动信息进行定位与地图构建(simultaneous localization and mapping,简称slam),为移动机器人提供更精准的导航能力,使得移动机器人能更有效地自主移动。
3、然而,现有的移动机器人所配置的摄像设备均为固定式设计,由于摄像头为精密电子装置,若在运输过程中不收纳摄像头,则摄像头则容易受撞受损,而若将摄像头拆卸,再现场再进行安装,则可能会导致安装精度不统一而影响使用,同时,若摄像头设置在机器人的主体远离其端部或侧部的位置,由于机器人机身会对摄像头的视野造成干扰,从而影响摄像头的视觉采集范围。
技术实现思路
1、本实用新型提供一种移动机器人,用以解决现有技术中移动机器人的摄像头视野受限且缺乏保护的缺陷,实现对摄像头的合理收纳保护,以及提供更好的视野范围。
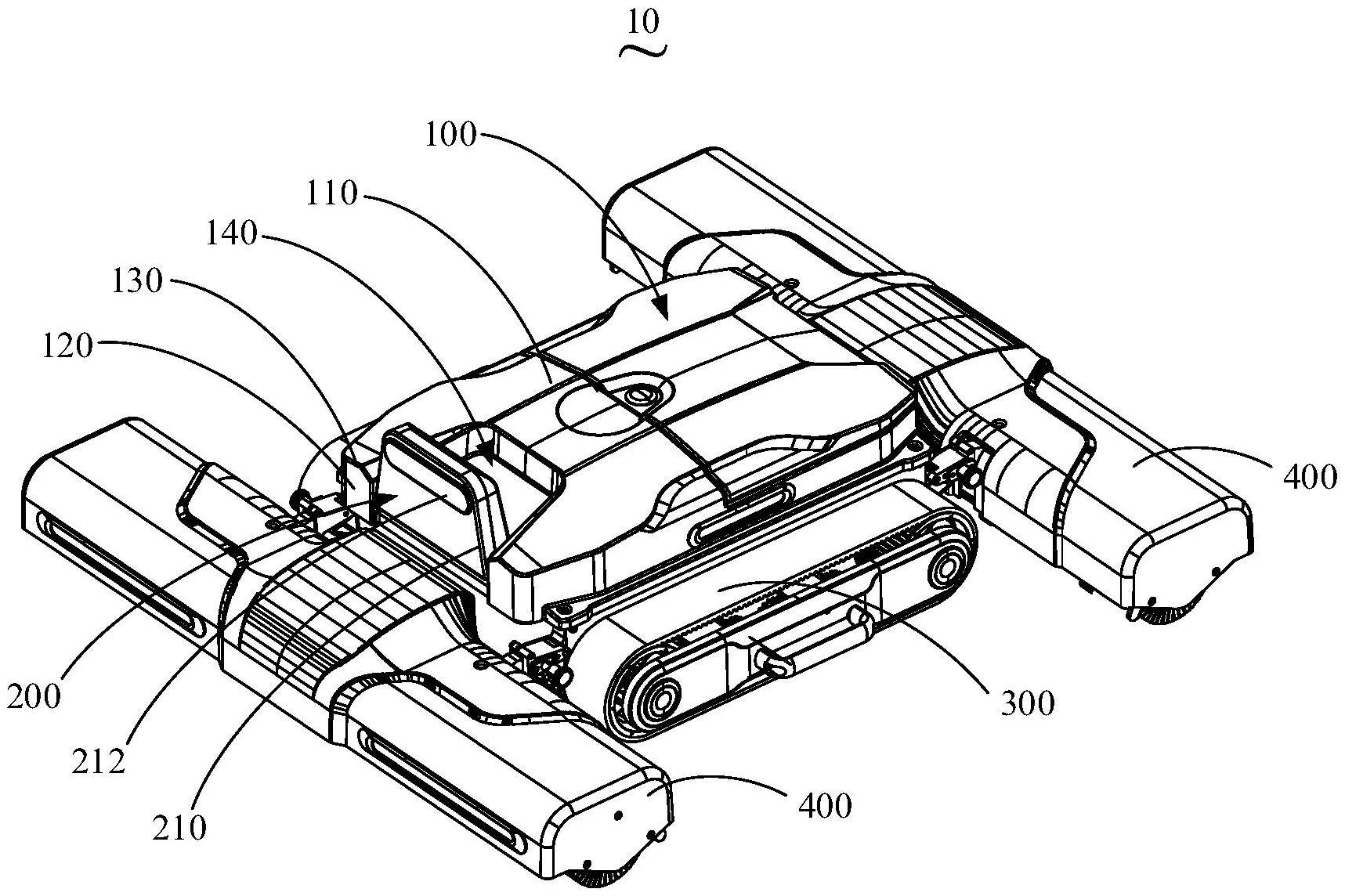
2、本实用新型提供一种移动机器人,包括:
3、机壳,与移动机器人的主体固定,所述机壳具有安装凹槽,所述安装凹槽至少连通所述机壳的两个外壁面;以及
4、视觉模组,所述视觉模组与所述主体和/或所述机壳相连,并可收纳于所述安装凹槽,所述视觉模组具有收纳位置和工作位置,其中,在所述视觉模组定位固定于收纳位置时,所述视觉模组收容于所述安装凹槽;在所述视觉模组定位固定于工作位置时,所述视觉模组部分凸出于所述安装凹槽;
5、其中,所述视觉模组与所述主体和/或所述机壳的连接位置靠所述机壳的外周缘设置。
6、根据本实用新型提供的一种移动机器人,所述机壳具有顶壁以及沿所述顶壁外周缘周设的外侧壁,所述顶壁与所述外侧壁相交的外周缘处向内凹陷形成所述安装凹槽,所述安装凹槽沿所述顶壁或所述外侧壁朝向远离所述外周缘的方向延伸,所述视觉模组与所述安装凹槽的相对的两个侧壁活动连接或经连接装置贯穿所述安装凹槽的两个相对侧壁并与所述主体相连。
7、根据本实用新型提供的一种移动机器人,所述视觉模组包括壳体、摄像头组件、第一转动组件和第二转动组件,所述第一转动组件和所述第二转动组件分别与所述壳体相对的两侧连接,以将所述壳体转动连接于所述主体上,所述摄像头组件与所述壳体固定,并位于所述壳体远离所述第一转动组件及所述第二转动组件的一端。
8、根据本实用新型提供的一种移动机器人,所述第一转动组件及所述第二转动组件均包括阻尼转轴,所述第一转动组件及所述第二转动组件中,所述阻尼转轴的两个可相对转动的端部分别与所述主体、所述壳体连接。
9、根据本实用新型提供的一种移动机器人,所述第一转动组件和所述第二转动组件中,至少一个所述阻尼转轴具有通孔,所述壳体经所述通孔与所述壳体外相连通。
10、根据本实用新型提供的一种移动机器人,还包括角度定位装置,所述角度定位装置与所述第一转动组件和/或所述第二转动组件相连,所述角度定位装置包括定位珠,所述阻尼转轴的两端分别固定有用于与所述主体、所述机壳相连的第一连接块、第二连接块,所述定位珠设置于所述第一连接块和所述第二连接块的其中一个上,所述第一连接块和所述第二连接块的另一个上设有与所述定位珠适配的定位孔,所述定位珠和/或所述定位孔绕所述阻尼转轴的轴线分布至少两个,使得所述定位珠与对应的所述定位孔配合时,能够将所述视觉模组定位固定在收纳位置或者工作位置。
11、根据本实用新型提供的一种移动机器人,所述视觉模组还包括连接件,所述连接件呈“几”字形设置,包括凸出部以及位于凸出部两端的连接部,所述连接件的两连接部分别与所述第一转动组件、所述第二转动组件连接,所述连接件的凸出部朝靠近所述摄像头组件的方向延伸。
12、根据本实用新型提供的一种移动机器人,所述视觉模组与所述机壳插拔连接,所述安装凹槽靠近所述机壳的外周缘的一端底面上设置有插槽,所述视觉模组的一端设有插接部,当所述视觉模组处于工作状态时,所述插接部与所述插槽配合插接设置并显露所述视觉模组的摄像头组件,当所述视觉模组处于收纳状态时,所述插接部与所述安装凹槽配合并使所述插槽收纳所述视觉模组的摄像头组件。
13、根据本实用新型提供的一种移动机器人,所述安装凹槽设于所述机壳的外侧壁,当所述视觉模组定位固定于所述收纳位置时,所述摄像头组件朝向所述安装凹槽的底面。
14、根据本实用新型提供的一种移动机器人,所述安装凹槽设于所述机壳的顶壁,所述安装凹槽的底面与水平面成一倾角α设置,且0°<α≤30°。
15、本实用新型提供的移动机器人,通过在机壳上开设安装凹槽,将视觉模组活动连接于所述移动机器人的主体和/或机壳上,且所述视觉模组与所述安装凹槽相对应设置,以使得所述视觉模组相对于所述机壳具有收纳位置和工作位置,如此在所述移动机器人不需要视觉模组工作时,所述视觉模组可以收纳于所述安装凹槽内,以对所述视觉模组起到保护作用,而在移动机器人需要所述视觉模组提供视野信息时则定位固定在工作位置;同时所述视觉模组的连接位置靠近所述机壳外周缘,这样在所述视觉模组定位固定在工作位置时,其更靠近所述机壳的外周缘,减少所述机壳对所述视觉模组在视角上的干涉,使得所述视觉模组可以获得更加宽广的视野范围。
技术特征:
1.一种移动机器人,其特征在于,包括:
2.根据权利要求1所述的移动机器人,其特征在于,所述机壳具有顶壁以及沿所述顶壁外周缘周设的外侧壁,所述顶壁与所述外侧壁相交的外周缘处向内凹陷形成所述安装凹槽,所述安装凹槽沿所述顶壁或所述外侧壁朝向远离所述外周缘的方向延伸,所述视觉模组与所述安装凹槽的相对的两个侧壁活动连接或经连接装置贯穿所述安装凹槽的两个相对侧壁并与所述主体相连。
3.根据权利要求1所述的移动机器人,其特征在于,所述视觉模组包括壳体、摄像头组件、第一转动组件和第二转动组件,所述第一转动组件和所述第二转动组件分别与所述壳体相对的两侧连接,以将所述壳体转动连接于所述主体上,所述摄像头组件与所述壳体固定,并位于所述壳体远离所述第一转动组件及所述第二转动组件的一端。
4.根据权利要求3所述的移动机器人,其特征在于,所述第一转动组件及所述第二转动组件均包括阻尼转轴,所述第一转动组件及所述第二转动组件中,所述阻尼转轴的两个可相对转动的端部分别与所述主体、所述壳体连接。
5.根据权利要求4所述的移动机器人,其特征在于,所述第一转动组件和所述第二转动组件中,至少一个所述阻尼转轴具有通孔,所述壳体经所述通孔与所述壳体外相连通。
6.根据权利要求4或5所述的移动机器人,其特征在于,还包括角度定位装置,所述角度定位装置与所述第一转动组件和/或所述第二转动组件相连,所述角度定位装置包括定位珠,所述阻尼转轴的两端分别固定有用于与所述主体、所述机壳相连的第一连接块、第二连接块,所述定位珠设置于所述第一连接块和所述第二连接块的其中一个上,所述第一连接块和所述第二连接块的另一个上设有与所述定位珠适配的定位孔,所述定位珠和/或所述定位孔绕所述阻尼转轴的轴线分布至少两个,使得所述定位珠与对应的所述定位孔配合时,能够将所述视觉模组定位固定在收纳位置或者工作位置。
7.根据权利要求3-5任一项所述的移动机器人,其特征在于,所述视觉模组还包括连接件,所述连接件呈“几”字形设置,包括凸出部以及位于凸出部两端的连接部,所述连接件的两所述连接部分别与所述第一转动组件、所述第二转动组件连接,所述连接件的凸出部朝靠近所述摄像头组件的方向延伸。
8.根据权利要求2所述的移动机器人,其特征在于,所述视觉模组与所述机壳插拔连接,所述安装凹槽靠近所述机壳的外周缘的一端底面上设置有插槽,所述视觉模组的一端设有插接部,当所述视觉模组处于工作状态时,所述插接部与所述插槽配合插接设置并显露所述视觉模组的摄像头组件,当所述视觉模组处于收纳状态时,所述插接部与所述安装凹槽配合并使所述插槽收纳所述视觉模组的摄像头组件。
9.根据权利要求3所述的移动机器人,其特征在于,所述安装凹槽设于所述机壳的外侧壁,当所述视觉模组定位固定于所述收纳位置时,所述摄像头组件朝向所述安装凹槽的底面。
10.根据权利要求2所述的移动机器人,其特征在于,所述安装凹槽设于所述机壳的顶壁,所述安装凹槽的底面与水平面成一倾角α设置,且0°<α≤30°。
技术总结
本技术涉及机器人技术领域,提供一种移动机器人。移动机器人包括机壳和视觉模组,机壳与移动机器人的主体固定,机壳具有安装凹槽,安装凹槽至少连通机壳的两个外壁面;视觉模组与所述主体和/或所述机壳相连,并可收纳于安装凹槽,视觉模组具有收纳位置和工作位置,其中,在视觉模组定位固定于收纳位置时,视觉模组收容于安装凹槽;在视觉模组定位固定于工作位置时,视觉模组部分凸出于安装凹槽;其中,视觉模组与所述主体和/或所述机壳的连接位置靠近机壳的外周缘设置。本申请移动机器人实现对摄像头的合理收纳保护的同时可以提供更好的视野能力。
技术研发人员:黄俊生,房睿,陈耿东
受保护的技术使用者:凌度(广东)智能科技发展有限公司
技术研发日:20230414
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!