关节执行器和协作机器人的制作方法
本技术涉及机器人,尤其涉及一种关节执行器和协作机器人。
背景技术:
1、机器人关节执行器装置是实现机器人关节运动的驱动装置,以其一体化,集成化,小型化的特点,越来越多的应用在各类机器人上。
2、传统协作机器人采用的模块化一体关节执行器,基本由ur(优傲)机械臂所使用的一体化关节执行器衍生而来。此种关节执行器采用顺次串联的形式将关节驱动器,编码器(高速端),制动器,无框力矩电机,谐波减速器通过螺钉刚性连接起来,此种连接结构导致关节执行的轴向长度过大,不利于关节的小型化,并且对各转接结构件的同心度要求过高,加工难度大,成本高。
技术实现思路
1、本实用新型旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本实用新型的实施例提出一种轴向尺寸小的关节执行器。
3、本实用新型的实施例还提出一种具有上述关节执行器的协作机器人。
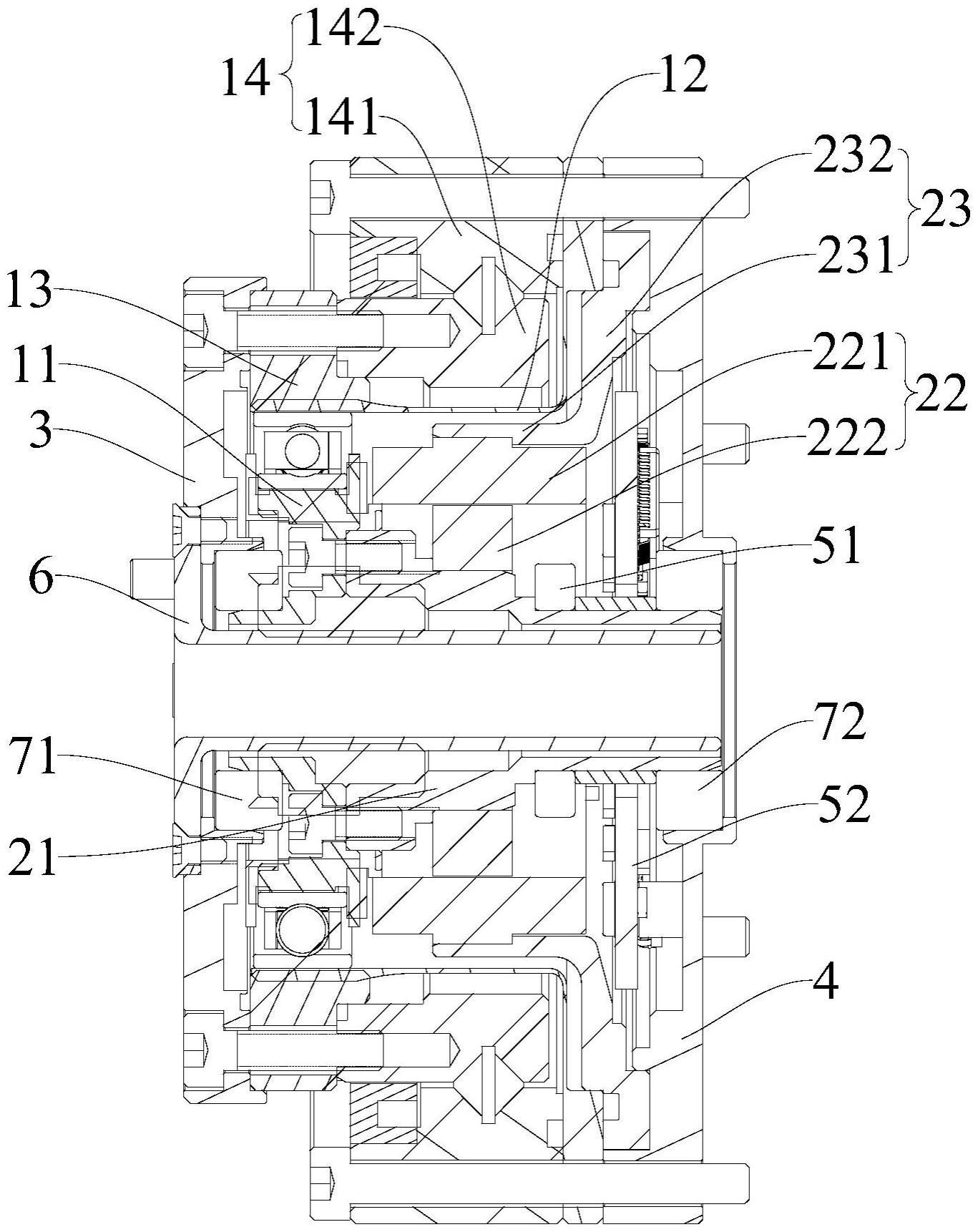
4、本实用新型实施例的关节执行器包括谐波减速器、电机组件、输出法兰和后盖,所述谐波减速器包括波发生器、柔轮、刚轮,所述柔轮具有容置腔,所述波发生器安装在所述容置腔内的一端并与所述柔轮相贴合,所述刚轮套设在所述柔轮的外侧一端并与所述柔轮啮合,所述电机组件包括电机轴、无框力矩电机和电机仓,所述电机仓与所述柔轮相连,所述电机仓的至少部分位于所述容置腔内,所述电机轴的一端与所述波发生器相连,所述无框力矩电机设置在所述容置腔内,所述无框力矩电机包括转子和定子,所述转子设置在所述定子内侧并与所述电机轴相连,所述定子设置在所述电机仓内,所述输出法兰与所述刚轮相连,所述后盖连接在所述柔轮的一端并将所述容置腔封闭。
5、本实用新型实施例的关节执行器采用了具有容置腔的柔轮,可以将无框力矩电机安装在容置腔内,无框力矩电机不会占用其他的轴向空间,最大化的减小了关节执行器的轴向尺寸,实现了关节执行器的小型化。
6、在一些实施例中,所述谐波减速器还包括交叉滚子轴承,所述交叉滚子轴承套设在所述柔轮外侧,所述交叉滚子轴承包括可相对转动的轴承外圈和轴承内圈,所述柔轮和所述电机仓均与所述轴承外圈相连,所述输出法兰和所述刚轮均与所述轴承内圈相连。
7、在一些实施例中,所述电机仓包括第一筒形件和第一法兰,所述第一法兰连接在所述第一筒形件的一端,所述定子的外周壁与所述第一筒形件的内周壁相连,所述第一法兰与所述轴承外圈和所述柔轮相连。
8、在一些实施例中,所述第一法兰的外沿设置有多个缺口,所述后盖上设置有与所述缺口对应的凸起,所述凸起配合在所述缺口内。
9、在一些实施例中,所述柔轮包括第二筒形件和第二法兰,所述第二法兰连接在所述第二筒形件的一端,所述容置腔形成于所述第二筒形件内,所述轴承外圈、所述第二法兰、所述第一法兰和所述后盖沿所述电机轴的轴向依次布置。
10、在一些实施例中,关节执行器还包括过线管,所述过线管包括第三筒形件和第三法兰,所述第三法兰连接在所述第三筒形件的一端,所述第三筒形件沿所述电机轴的轴向贯穿所述电机轴,所述第三法兰与所述输出法兰相连。
11、在一些实施例中,关节执行器还包括编码器组件,所述编码器组件包括磁环和读数板,所述磁环套设在所述电机轴上并与所述电机轴同步转动,所述读数板安装在所述后盖上并与所述磁环相对布置。
12、在一些实施例中,关节执行器还包括前端轴承和后端轴承,所述波发生器的前端设置有环形凸起,所述前端轴承的内圈套设在所述环形凸起上,所述前端轴承的外圈与所述输出法兰相连,所述后端轴承的内圈套设在所述电机轴上,所述后盖上设置有轴承孔,所述后端轴承的外圈配合在所述轴承孔内。
13、在一些实施例中,关节执行器还包括护线胶垫,所述护线胶垫上设置有过线孔,所述后盖上设置有通孔,所述护线胶垫配合在所述通孔内。
14、本实用新型第二方面实施例的协作机器人包括上述任一实施例所述的关节执行器。
技术特征:
1.一种关节执行器,其特征在于,包括:
2.根据权利要求1所述关节执行器,其特征在于,所述谐波减速器还包括交叉滚子轴承,所述交叉滚子轴承套设在所述柔轮外侧,所述交叉滚子轴承包括可相对转动的轴承外圈和轴承内圈,所述柔轮和所述电机仓均与所述轴承外圈相连,所述输出法兰和所述刚轮均与所述轴承内圈相连。
3.根据权利要求2所述关节执行器,其特征在于,所述电机仓包括第一筒形件和第一法兰,所述第一法兰连接在所述第一筒形件的一端,所述定子的外周壁与所述第一筒形件的内周壁相连,所述第一法兰与所述轴承外圈和所述柔轮相连。
4.根据权利要求3所述关节执行器,其特征在于,所述第一法兰的外沿设置有多个缺口,所述后盖上设置有与所述缺口对应的凸起,所述凸起配合在所述缺口内。
5.根据权利要求3所述关节执行器,其特征在于,所述柔轮包括第二筒形件和第二法兰,所述第二法兰连接在所述第二筒形件的一端,所述容置腔形成于所述第二筒形件内,所述轴承外圈、所述第二法兰、所述第一法兰和所述后盖沿所述电机轴的轴向依次布置。
6.根据权利要求1所述关节执行器,其特征在于,还包括过线管,所述过线管包括第三筒形件和第三法兰,所述第三法兰连接在所述第三筒形件的一端,所述第三筒形件沿所述电机轴的轴向贯穿所述电机轴,所述第三法兰与所述输出法兰相连。
7.根据权利要求1-6中任一项所述关节执行器,其特征在于,还包括编码器组件,所述编码器组件包括磁环和读数板,所述磁环套设在所述电机轴上并与所述电机轴同步转动,所述读数板安装在所述后盖上并与所述磁环相对布置。
8.根据权利要求1-6中任一项所述关节执行器,其特征在于,还包括前端轴承和后端轴承,所述波发生器的前端设置有环形凸起,所述前端轴承的内圈套设在所述环形凸起上,所述前端轴承的外圈与所述输出法兰相连,所述后端轴承的内圈套设在所述电机轴上,所述后盖上设置有轴承孔,所述后端轴承的外圈配合在所述轴承孔内。
9.根据权利要求1-6中任一项所述关节执行器,其特征在于,还包括护线胶垫,所述护线胶垫上设置有过线孔,所述后盖上设置有通孔,所述护线胶垫配合在所述通孔内。
10.一种协作机器人,其特征在于,包括根据权利要求1-9中任一项所述的关节执行器。
技术总结
本技术公开了一种关节执行器和协作机器人,所述关节执行器包括谐波减速器、电机组件、输出法兰和后盖,谐波减速器包括波发生器、柔轮、刚轮,柔轮具有容置腔,所述波发生器安装在所述容置腔内,所述刚轮套设在所述柔轮的外侧一端并与所述柔轮啮合,电机组件包括电机轴、无框力矩电机和电机仓,所述电机仓与所述柔轮相连,所述电机仓的至少部分位于所述容置腔内,所述电机轴的一端与所述波发生器相连,无框力矩电机包括转子和定子,所述转子与所述电机轴相连,所述定子设置在所述电机仓内,所述输出法兰与所述刚轮相连,所述后盖连接在所述柔轮的一端。本技术实施例的关节执行器减小了关节执行器的轴向尺寸,实现了关节执行器的小型化。
技术研发人员:孙晨光
受保护的技术使用者:北京小米移动软件有限公司
技术研发日:20230417
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!