腕关节、机械臂和机器人的制作方法
本技术涉及机器人,具体地,涉及一种腕关节、机械臂和机器人。
背景技术:
1、人形机器人的上肢根据功能性区分通常包括:手臂关节、腕关节和手关节,机器人手臂结构主要用于控制上肢的手关节达到指定的空间位置。腕关节主要用于实现上肢的手关节在空间中的姿态调整,而手关节作为执行末端用于完成抓取或操作工具等工作。
2、在相关技术中,人形机器人的手腕关节多采用三个独立的关节电机以串联的形式通过正交排布分别控制机械臂末端的yaw-pitch-roll三个方向的转动,从而实现手腕的转动、俯仰和偏摆运动。但是由于关节电机的尺寸较大,并通过首尾串联堆叠在一起,导致这种传动形式存在结构冗长、质量重和末端惯量大的缺点,大大降低了手关节的运动性能,且仿生性较低。
技术实现思路
1、本实用新型旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本实用新型的实施例提出一种占用空间较小,且有利于减小机械臂末端的转动惯量的腕关节。
3、本实用新型的实施例还提出一种机械臂。
4、本实用新型的实施例还提出一种机器人。
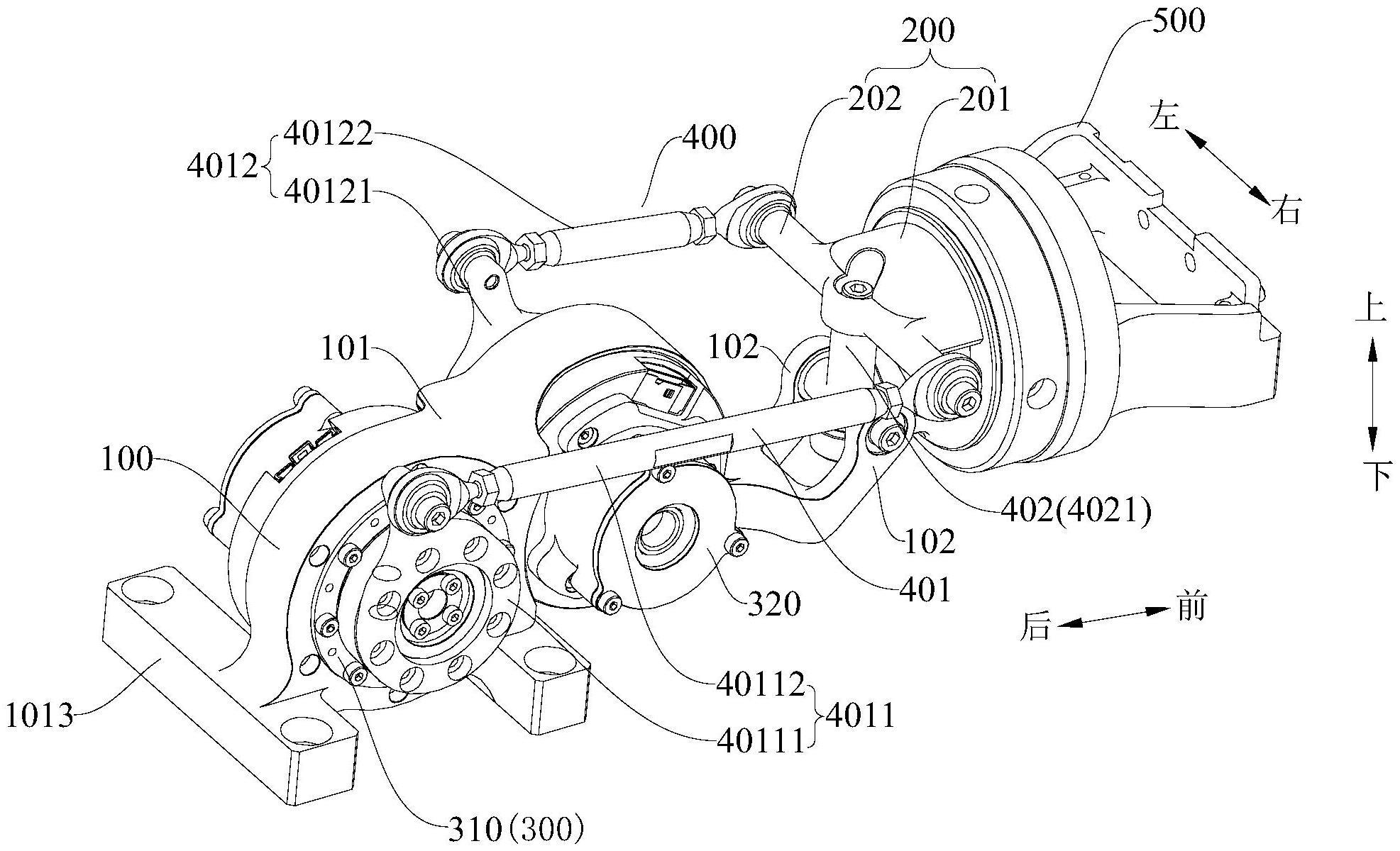
5、本实用新型的实施例的腕关节包括:机架;转接件,所述转接件设于所述机架上且适于与执行末端相连;驱动装置,所述驱动装置设于所述机架背离所述转接件的一端;传动装置,所述传动装置包括联动组件和转动组件,所述转动组件与所述机架和所述转接件相连,所述联动组件与所述驱动装置和所述转接件相连,所述驱动装置可驱动所述联动组件移动,以带动所述转接件绕第一轴线和第二轴线相对所述机架摆动,所述第一轴线正交于所述第二轴线。
6、根据本实用新型的实施例的腕关节,由于驱动装置设于机架背离转接件的一端,以使腕关节中质量较大的零件布置在更加远离执行末端的一侧,从而可以降低执行末端的转动惯量,有利于对整臂的控制以及减少执行末端的残余振动。另外,由于驱动装置驱动联动组件移动,以带动转接件绕第一轴线和第二轴线相对机架摆动,可以优化腕关节的结构布局,减小腕关节的占用空间,仿生效果更好。
7、在一些实施例中,所述驱动装置包括第一驱动件和第二驱动件,所述第一驱动件和所述第二驱动件沿所述机架的长度方向间隔布置,所述联动组件包括第一传动部件和第二传动部件,所述第一驱动件通过所述第一传动部件与所述转接件的一侧相连,所述第二驱动件通过所述第二传动部件与所述转接件的另一侧相连。
8、在一些实施例中,所述第一传动部件和所述第二传动部件沿所述第一轴线的方向间隔布置在所述机架的两侧,所述第一驱动件的输出端沿所述第一轴线设于所述机架的一侧,所述第二驱动件沿所述第一轴线设于所述机架的另一侧。
9、在一些实施例中,所述第一传动部件包括第一摇杆和第一连杆,所述第一连杆的一端与所述第一摇杆可枢转地连接,所述第一连杆的另一端与所述转接件的一侧可枢转地连接,所述第一驱动件与所述第一摇杆相连,所述第一驱动件可驱动所述第一摇杆转动,以使所述第一连杆推动所述转接件转动;所述第二传动部件包括第二摇杆和第二连杆,所述第二连杆的一端与所述第二摇杆可枢转地连接,所述第二连杆的另一端与所述转接件的另一侧可枢转地连接,所述第二驱动件与所述第二摇杆相连,所述第二驱动件可驱动所述第二摇杆转动,以使所述第二连杆推动所述转接件转动。
10、在一些实施例中,所述转动组件包括十字轴,所述十字轴包括正交布置的第一轴体和第二轴体,所述第一轴体设于所述机架上且绕所述第一轴线可转动,所述第二轴体设于所述转接件上且绕所述第二轴线可转动。
11、在一些实施例中,所述机架包括相连的架体和两个支撑部,所述驱动装置设于所述架体上,两个所述支撑部沿所述第一轴线的方向间隔布置,所述第一轴体设于两个所述支撑部之间且绕所述第一轴线可转动;和/或,所述转接件包括相连的转接本体和连接部,所述连接部沿所述第一轴线的方向延伸,所述第二轴体的一端与所述连接部相连且绕所述第二轴线可转动,所述联动组件与所述连接部的端部相连。
12、在一些实施例中,所述第一驱动件和所述第二驱动件均为电机模组,所述电机模组包括:外壳、电机本体、谐波减速器和输出法兰,所述外壳与所述机架相连,所述电机本体和所述谐波减速器均设于所述外壳内,所述电机本体与所述谐波减速器相连,所述谐波减速器与所述输出法兰相连,所述输出法兰与所述联动组件相连。
13、在一些实施例中,所述电机本体包括无框力矩电机和电机轴,所述电机轴的一端与所述无框力矩电机相连,所述电机轴的另一端与所述谐波发生器相连,所述电机模组还包括编码器,所述编码器包括读数板和磁环,所述电机轴穿设于所述读数板,所述读数板与所述外壳相对固定,所述磁环套设在所述电机轴上且与所述电机轴同步转动,所述磁环与所述读数板相对布置。
14、在一些实施例中,所述谐波发生器包括波发生器、刚轮和柔轮,所述电机本体与所述波发生器相连,所述柔轮套设于所述波发生器的外侧且与所述波发生器啮合,所述刚轮套设于所述柔轮的外侧且与所述柔轮啮合,所述刚轮与所述输出法兰相连。
15、根据本实用新型的另一实施例的机械臂,包括:手臂关节;腕关节,所述腕关节为本实用新型实施例的中任一项所述的腕关节,所述机架与所述手臂关节相连;执行末端,所述执行末端与所述转接件相连。
16、根据本实用新型的实施例的机械臂,由于驱动装置设于机架背离转接件的一端,以使腕关节中质量较大的零件布置在更加远离执行末端的一侧,从而可以降低执行末端的转动惯量,有利于对整臂的控制以及减少执行末端的残余振动。另外,由于驱动装置驱动联动组件移动,以带动转接件绕第一轴线和第二轴线相对机架摆动,可以优化腕关节的结构布局,减小腕关节的占用空间,仿生效果更好。
17、根据本实用新型的另一实施例的机器人,包括本实用新型实施例的所述的机械臂。
18、根据本实用新型的实施例的机器人,由于驱动装置设于机架背离转接件的一端,以使腕关节中质量较大的零件布置在更加远离执行末端的一侧,从而可以降低执行末端的转动惯量,有利于对整臂的控制以及减少执行末端的残余振动。另外,由于驱动装置驱动联动组件移动,以带动转接件绕第一轴线和第二轴线相对机架摆动,可以优化腕关节的结构布局,减小腕关节的占用空间,仿生效果更好。
技术特征:
1.一种腕关节,其特征在于,包括:
2.根据权利要求1所述的腕关节,其特征在于,所述驱动装置包括第一驱动件和第二驱动件,所述第一驱动件和所述第二驱动件沿所述机架的长度方向间隔布置,所述联动组件包括第一传动部件和第二传动部件,所述第一驱动件通过所述第一传动部件与所述转接件的一侧相连,所述第二驱动件通过所述第二传动部件与所述转接件的另一侧相连。
3.根据权利要求2所述的腕关节,其特征在于,所述第一传动部件和所述第二传动部件沿所述第一轴线的方向间隔布置在所述机架的两侧,所述第一驱动件的输出端沿所述第一轴线设于所述机架的一侧,所述第二驱动件沿所述第一轴线设于所述机架的另一侧。
4.根据权利要求2所述的腕关节,其特征在于,所述第一传动部件包括第一摇杆和第一连杆,所述第一连杆的一端与所述第一摇杆可枢转地连接,所述第一连杆的另一端与所述转接件的一侧可枢转地连接,所述第一驱动件与所述第一摇杆相连,所述第一驱动件可驱动所述第一摇杆转动,以使所述第一连杆推动所述转接件转动;
5.根据权利要求1所述的腕关节,其特征在于,所述转动组件包括十字轴,所述十字轴包括正交布置的第一轴体和第二轴体,所述第一轴体设于所述机架上且绕所述第一轴线可转动,所述第二轴体设于所述转接件上且绕所述第二轴线可转动。
6.根据权利要求5所述的腕关节,其特征在于,所述机架包括相连的架体和两个支撑部,所述驱动装置设于所述架体上,两个所述支撑部沿所述第一轴线的方向间隔布置,所述第一轴体设于两个所述支撑部之间且绕所述第一轴线可转动;
7.根据权利要求2所述的腕关节,其特征在于,所述第一驱动件和所述第二驱动件均为电机模组,所述电机模组包括:外壳、电机本体、谐波减速器和输出法兰,所述外壳与所述机架相连,所述电机本体和所述谐波减速器均设于所述外壳内,所述电机本体与所述谐波减速器相连,所述谐波减速器与所述输出法兰相连,所述输出法兰与所述联动组件相连。
8.根据权利要求7所述的腕关节,其特征在于,所述电机本体包括无框力矩电机和电机轴,所述电机轴的一端与所述无框力矩电机相连,所述电机轴的另一端与所述谐波减速器相连,所述电机模组还包括编码器,所述编码器包括读数板和磁环,所述电机轴穿设于所述读数板,所述读数板与所述外壳相对固定,所述磁环套设在所述电机轴上且与所述电机轴同步转动,所述磁环与所述读数板相对布置。
9.根据权利要求7所述的腕关节,其特征在于,所述谐波减速器包括波发生器、刚轮和柔轮,所述电机本体与所述波发生器相连,所述柔轮套设于所述波发生器的外侧且与所述波发生器啮合,所述刚轮套设于所述柔轮的外侧且与所述柔轮啮合,所述刚轮与所述输出法兰相连。
10.一种机械臂,其特征在于,包括:
11.一种机器人,其特征在于,包括权利要求10所述的机械臂。
技术总结
本技术涉及一种腕关节、机械臂和机器人,所述腕关节包括:机架、转接件、驱动装置和传动装置,所述转接件设于所述机架上且适于与执行末端相连,所述驱动装置设于所述机架背离所述转接件的一端,所述传动装置包括联动组件和转动组件,所述转动组件与所述机架和所述转接件相连,所述联动组件与所述驱动装置和所述转接件相连,所述驱动装置可驱动所述联动组件移动,以带动所述转接件绕第一轴线和第二轴线相对所述机架摆动,所述第一轴线正交于所述第二轴线。本技术的腕关节的占用空间较小,且有利于减小机械臂末端的转动惯量,仿生效果较好。
技术研发人员:孙晨光
受保护的技术使用者:北京小米机器人技术有限公司
技术研发日:20230417
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!