一种桌面机器人的活动构件及桌面机器人的制作方法
本技术涉及机器人,具体涉及一种桌面机器人的活动构件以及一种桌面机器人。
背景技术:
1、随着科学技术的不断进步和机器人技术的不断发展,智能机器人已逐渐走入千家万户,市场上也出现了不少智能机器人给人们的生活带来便利和乐趣,其中,桌面机器人作为智能机器人的一种,侧重于情感交互和陪伴娱乐。
2、现有桌面机器人的耳部结构多数作为装饰以优化外部美观,也有部分设计为交互反馈结构,但其智能力度和整体结构尚待完善,因此如何丰富桌面机器人功能和优化结构是亟待解决的问题。
3、因此,有必要提供一种新方式来解决上述技术问题。
技术实现思路
1、针对现有技术的不足之处,本实用新型的目的在于提供一种桌面机器人的活动构件,通过设置舵机组件为后期预留扩展接口,且用户利用扩展组件即可输入指令以与桌面机器人实现交互和反馈,简化操作方式,提高用户使用便利性和趣味性,丰富桌面机器人功能的同时优化结构和整体外观。
2、本实用新型的技术方案概述如下:
3、一种桌面机器人的活动构件,包括:
4、舵机组件,其安装于桌面机器人内部并与控制电路连接,用以输出转动运动的驱使力;
5、传动板,其与所述舵机组件的转动输出端固定连接;
6、扩展组件,其与所述传动板可拆卸连接;
7、其中,舵机组件受控时,所述传动板在所述舵机组件的驱使下带动扩展组件同步旋转;所述扩展组件受外力控制时,所述传动板在所述扩展组件的驱使下带动舵机组件转动,以改变舵机组件的转动状态。
8、优选的,所述扩展组件包括有若干磁铁,所述扩展组件可通过磁铁吸附安装至所述传动板上。
9、优选的,所述传动板与所述舵机组件之间设置有光源组件,其中,所述光源组件位于桌面机器人外侧表面并与所述舵机组件固定连接。
10、优选的,所述传动板与桌面机器人壳体表面之间设置有限位结构,用以限定所述传动板的旋转角度。
11、优选的,所述限位结构包括限位凸起和弧形挡块;其中,所述限位凸起形成于所述传动板内侧表面,所述弧形挡块形成于桌面机器人壳体表面。
12、优选的,所述传动板的旋转角度范围为-90°到90°。
13、优选的,所述舵机组件包括:
14、舵机;
15、舵机固定件,其用以安装所述舵机并与桌面机器人壳体内侧固定连接;
16、灯板,其安装于所述舵机固定件一侧;
17、其中,所述舵机固定件中间位置贯穿安装所述舵机,且所述舵机的转动输出端伸出桌面机器人外壳与所述传动板连接。
18、优选的,所述舵机的转动输出端设有为齿轮轴,所述传动板对应位置形成有齿圈以与所述齿轮轴啮合。
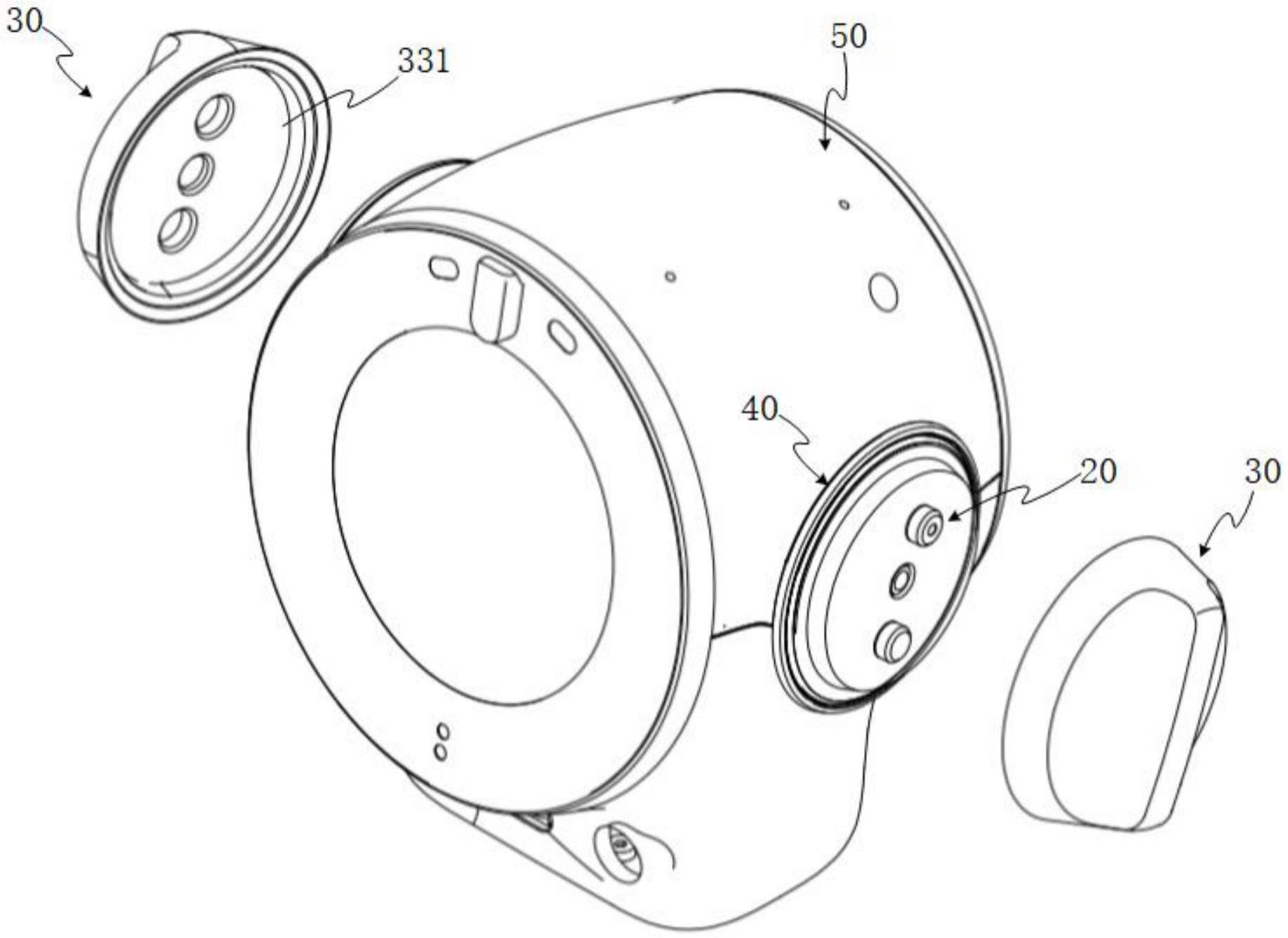
19、优选的,所述扩展组件为旋钮组件,所述旋钮组件包括旋钮上盖、支撑肋和旋钮下盖;其中,
20、所述旋钮下盖安装至所述传动板外侧,所述支撑肋与所述旋钮下盖可拆卸安装,所述旋钮上盖覆盖所述支撑肋与所述旋钮下盖以形成所述旋钮组件的外饰面。
21、本发明还提供一种桌面机器人,包括如上述的桌面机器人的活动构件。
22、相比现有技术,本实用新型的有益效果在于:
23、本实用新型提供一种桌面机器人的活动构件,包括:舵机组件,其安装于桌面机器人内部并与控制电路连接,用以输出转动运动的驱使力;传动板,其与舵机组件的转动输出端固定连接;扩展组件,其与传动板可拆卸连接;其中,舵机组件受控时,传动板在舵机组件的驱使下带动扩展组件同步旋转;扩展组件受外力控制时,传动板在扩展组件的驱使下带动舵机组件转动,以改变舵机组件的转动状态。本实用新型通过设置舵机组件为后期预留扩展接口,且用户利用扩展组件即可输入指令以与桌面机器人实现交互和反馈,简化操作方式,提高用户使用便利性和趣味性,丰富桌面机器人功能的同时优化结构和整体外观。
24、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。本实用新型的具体实施方式由以下实施例及其附图详细给出。
技术特征:
1.一种桌面机器人的活动构件,其特征在于,包括:
2.如权利要求1所述的桌面机器人的活动构件,其特征在于:所述扩展组件包括有若干磁铁,所述扩展组件可通过磁铁吸附安装至所述传动板上。
3.如权利要求1所述的桌面机器人的活动构件,其特征在于:所述传动板与所述舵机组件之间设置有光源组件,其中,所述光源组件位于桌面机器人外侧表面并与所述舵机组件固定连接。
4.如权利要求1所述的桌面机器人的活动构件,其特征在于:所述传动板与桌面机器人壳体表面之间设置有限位结构,用以限定所述传动板的旋转角度。
5.如权利要求4所述的桌面机器人的活动构件,其特征在于:所述限位结构包括限位凸起和弧形挡块;其中,所述限位凸起形成于所述传动板内侧表面,所述弧形挡块形成于桌面机器人壳体表面。
6.如权利要求4所述的桌面机器人的活动构件,其特征在于:所述传动板的旋转角度范围为-90°到90°。
7.如权利要求1所述的桌面机器人的活动构件,其特征在于,所述舵机组件包括:
8.如权利要求1所述的桌面机器人的活动构件,其特征在于:所述舵机的转动输出端设有齿轮轴,所述传动板对应位置形成有齿圈以与所述齿轮轴啮合。
9.如权利要求1所述的桌面机器人的活动构件,其特征在于:所述扩展组件为旋钮组件,所述旋钮组件包括旋钮上盖、支撑肋和旋钮下盖;其中,
10.一种桌面机器人,其特征在于,包括如权利要求1所述的桌面机器人的活动构件。
技术总结
本技术公开了一种桌面机器人的活动构件及桌面机器人,包括:舵机组件,其安装于桌面机器人内部并与控制电路连接,用以输出转动运动的驱使力;传动板,其与舵机组件的转动输出端固定连接;扩展组件,其与传动板可拆卸连接;其中,舵机组件受控时,传动板在舵机组件的驱使下带动扩展组件同步旋转;扩展组件受外力控制时,传动板在扩展组件的驱使下带动舵机组件转动,以改变舵机组件的转动状态。本技术通过设置舵机组件为后期预留扩展接口,且用户利用扩展组件即可输入指令以与桌面机器人实现交互和反馈,简化操作方式,提高用户使用便利性和趣味性,丰富桌面机器人功能的同时优化结构和整体外观。
技术研发人员:李明,周翔,张陆来
受保护的技术使用者:北京人和家科技有限公司
技术研发日:20230421
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!