关节执行器和机器人的制作方法
本公开涉及终端,尤其涉及一种关节执行器和机器人。
背景技术:
1、关节执行器是机器人或者机械臂的关键部件,关节执行器的设计会直接影响机器人的整体性能。其中,关节执行器的尺寸和输出扭矩是影响机器人的轻量化设计和负载自重比的关键因素。
技术实现思路
1、本公开提供一种关节执行器和机器人,以解决相关技术中的不足。
2、根据本公开实施例的第一方面,提供一种关节执行器,包括:
3、壳体;
4、输出法兰,所述输出法兰与所述壳体转动连接;
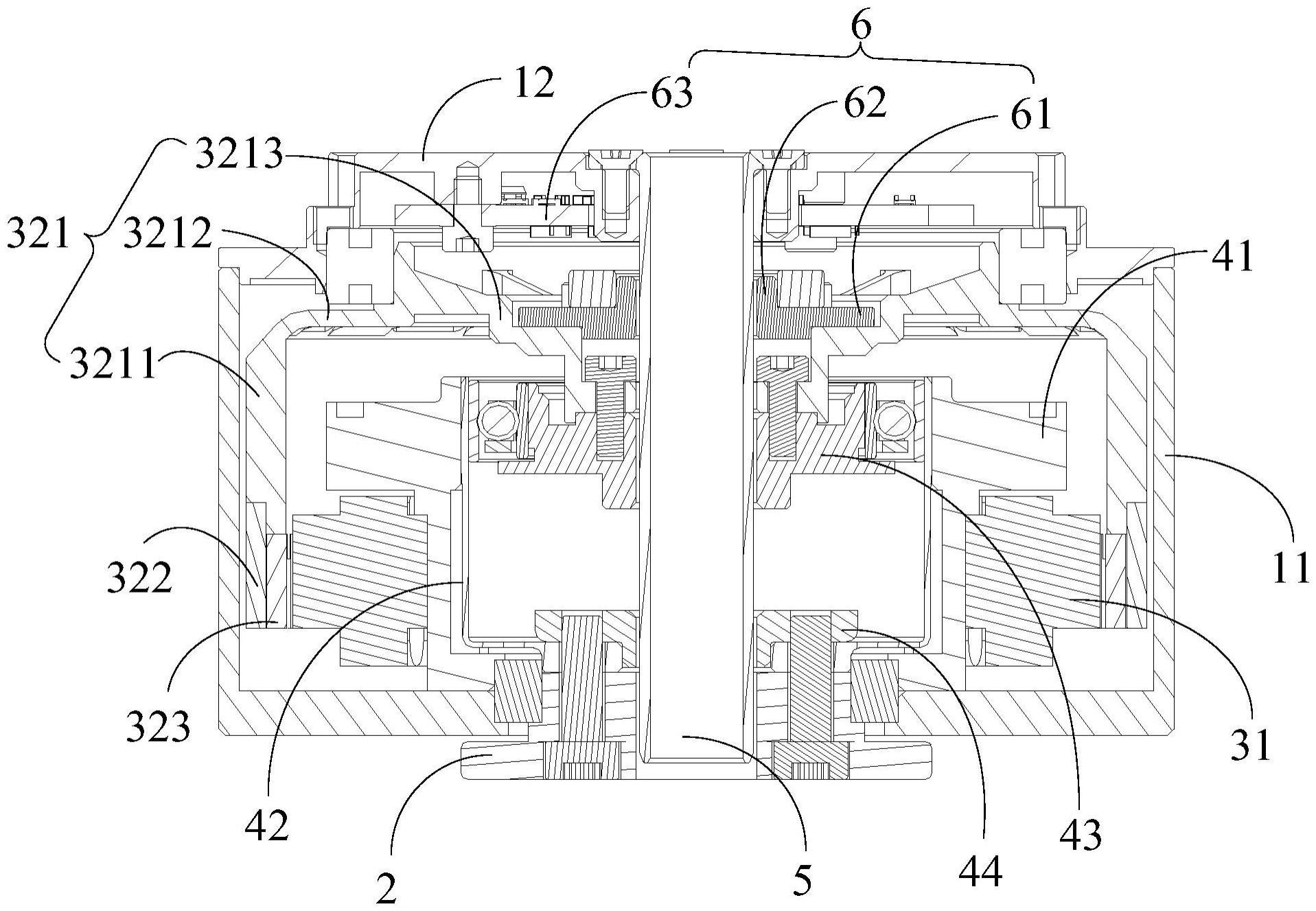
5、电机,所述电机设置于所述壳体内,所述电机包括定子和转子,所述转子环绕设置于所述定子的外侧,所述转子与所述壳体转动连接;
6、谐波减速器,所述谐波减速器设置于所述定子内侧,且所述谐波减速器与所述输出法兰连接;
7、所述电机驱动所述谐波减速器转动,所述谐波减速器驱动所述输出法兰转动。
8、可选的,所述谐波减速器包括:
9、钢轮,所述钢轮与所述壳体连接,所述钢轮与所述定子连接且所述钢轮部分朝向所述定子内壁设置;
10、柔轮,所述柔轮设置于所述钢轮内侧并与所述钢轮啮合,所述柔轮还与所述输出法兰固定连接;
11、波发生器,所述波发生器连接于所述柔轮的内侧,且所述波发生器与所述转子固定连接。
12、可选的,所述谐波减速器还包括柔轮压板,所述柔轮压板与所述柔轮和所述输出法兰分别固定连接,所述柔轮通过所述柔轮压板驱动所述输出法兰转动。
13、可选的,所述波发生器连接于所述柔轮轴向上的一端,所述柔轮压板连接于所述柔轮轴向上的另一端。
14、可选的,所述转子包括:
15、转子支架,所述转子支架与所述壳体转动连接,所述转子支架与所述谐波减速器的波发生器连接;
16、转子磁钢固定件,所述转子磁钢固定件设置于所述转子支架;
17、转子磁钢,所述转子磁钢设置于所述转子磁钢固定件。
18、可选的,所述转子支架包括:
19、第一环绕部,所述第一环绕部对应于所述壳体的侧壁设置,且所述第一环绕部与所述转子磁钢固定件固定连接;
20、第二环绕部,所述第二环绕部与所述第一环绕部连接,且所述第二环绕部朝向所述壳体的顶壁设置,所述第二环绕部与所述壳体转动连接
21、第三环绕部,所述第三环绕部连接于所述第二环绕部背离所述第一环绕部的一端,所述第三环绕部朝所述壳体的中部延伸,所述第三环绕部与所述波发生器固定连接。
22、可选的,所述壳体包括中空外壳和端盖,所述端盖设置于所述中空外壳的一端开口处,所述输出法兰设置于所述中空外壳另一端开口处。
23、可选的,还包括中空过线轴,所述中空过线轴穿设所述输出法兰、所述谐波减速器与所述壳体固定连接。
24、可选的,还包括编码器,所述编码器包括磁环、磁环支架和读数板,所述磁环设置于所述磁环支架,所述磁环支架与所述转子连接,所述读数板固定连接于所述壳体。
25、根据本公开实施例的第二方面,提供一种机器人,包括如上述中任一项实施例所述的关节执行器。
26、本公开的实施例提供的技术方案可以包括以下有益效果:
27、由上述实施例可知,本公开提供一种关节执行器,该关节执行器配置有谐波减速器,同时将谐波减速器与电机之间采用“内嵌式”设计,从而可以减小关节执行器的尺寸,有利于轻量化和高负载自重比的设计,同时可以有效利用谐波减速器的优势,实现关节执行器的高输出能力和高输出精度的设计。
28、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种关节执行器,其特征在于,包括:
2.根据权利要求1所述的关节执行器,其特征在于,所述谐波减速器包括:
3.根据权利要求2所述的关节执行器,其特征在于,所述谐波减速器还包括柔轮压板,所述柔轮压板与所述柔轮和所述输出法兰分别固定连接,所述柔轮通过所述柔轮压板驱动所述输出法兰转动。
4.根据权利要求3所述的关节执行器,其特征在于,所述波发生器连接于所述柔轮轴向上的一端,所述柔轮压板连接于所述柔轮轴向上的另一端。
5.根据权利要求1所述的关节执行器,其特征在于,所述转子包括:
6.根据权利要求5所述的关节执行器,其特征在于,所述转子支架包括:
7.根据权利要求1所述的关节执行器,其特征在于,所述壳体包括中空外壳和端盖,所述端盖设置于所述中空外壳的一端开口处,所述输出法兰设置于所述中空外壳另一端开口处。
8.根据权利要求1所述的关节执行器,其特征在于,还包括中空过线轴,所述中空过线轴穿设所述输出法兰、所述谐波减速器与所述壳体固定连接。
9.根据权利要求1所述的关节执行器,其特征在于,还包括编码器,所述编码器包括磁环、磁环支架和读数板,所述磁环设置于所述磁环支架,所述磁环支架与所述转子连接,所述读数板固定连接于所述壳体。
10.一种机器人,其特征在于,包括如权利要求1-9中任一项所述的关节执行器。
技术总结
本公开是关于一种关节执行器和机器人。关节执行器包括:壳体;输出法兰,所述输出法兰与所述壳体转动连接;电机,所述电机设置于所述壳体内,所述电机包括定子和转子,所述转子环绕设置于所述定子的外侧,所述转子与所述壳体转动连接;谐波减速器,所述谐波减速器设置于所述定子内侧,且所述谐波减速器与所述输出法兰连接;所述电机驱动所述谐波减速器转动,所述谐波减速器驱动所述输出法兰转动。
技术研发人员:张佳俊,任赜宇,孙晨光,黄荔群,孙国康,高英皓
受保护的技术使用者:北京小米移动软件有限公司
技术研发日:20230425
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!