一种电磁式机械手的制作方法
本技术涉及机器人,具体而言,涉及一种电磁式机械手。
背景技术:
1、随着全球智能制造技术的不断发展,极大地促进了机器人技术的快速发展,优良的性能及良好的通用性、适用性、兼容性成为在该行业立足的关键。金属类零件的搬运在生产制造中占有相当大的比例,对金属类零件夹取机械手的研究和设计对提高生产效率和生产自动化水平具有极其重要的意义。
2、现有的抓取金属类零件的机械手主要分为两类。一类是以空压机为动力源的气动机械手;另一类则是以电磁铁为主要动力的机械手。如专利cn111015708b所述的一种适用于抓取多种零件的机械手爪,该机械手爪主要用于多种不同类型零部件的抓取,结构设计相对复杂,后期维护成本高,由于要借助空压机提供动力,从而使其整体设备占用空间面积增大;对于现有的电磁式机械手,如专利cn109866246a所述的电磁式机械手,则存在结构形式固定、兼容性差、效率低等系列问题。
技术实现思路
1、本实用新型的目的在于提供一种电磁式机械手,以解决背景技术中所指出的问题。
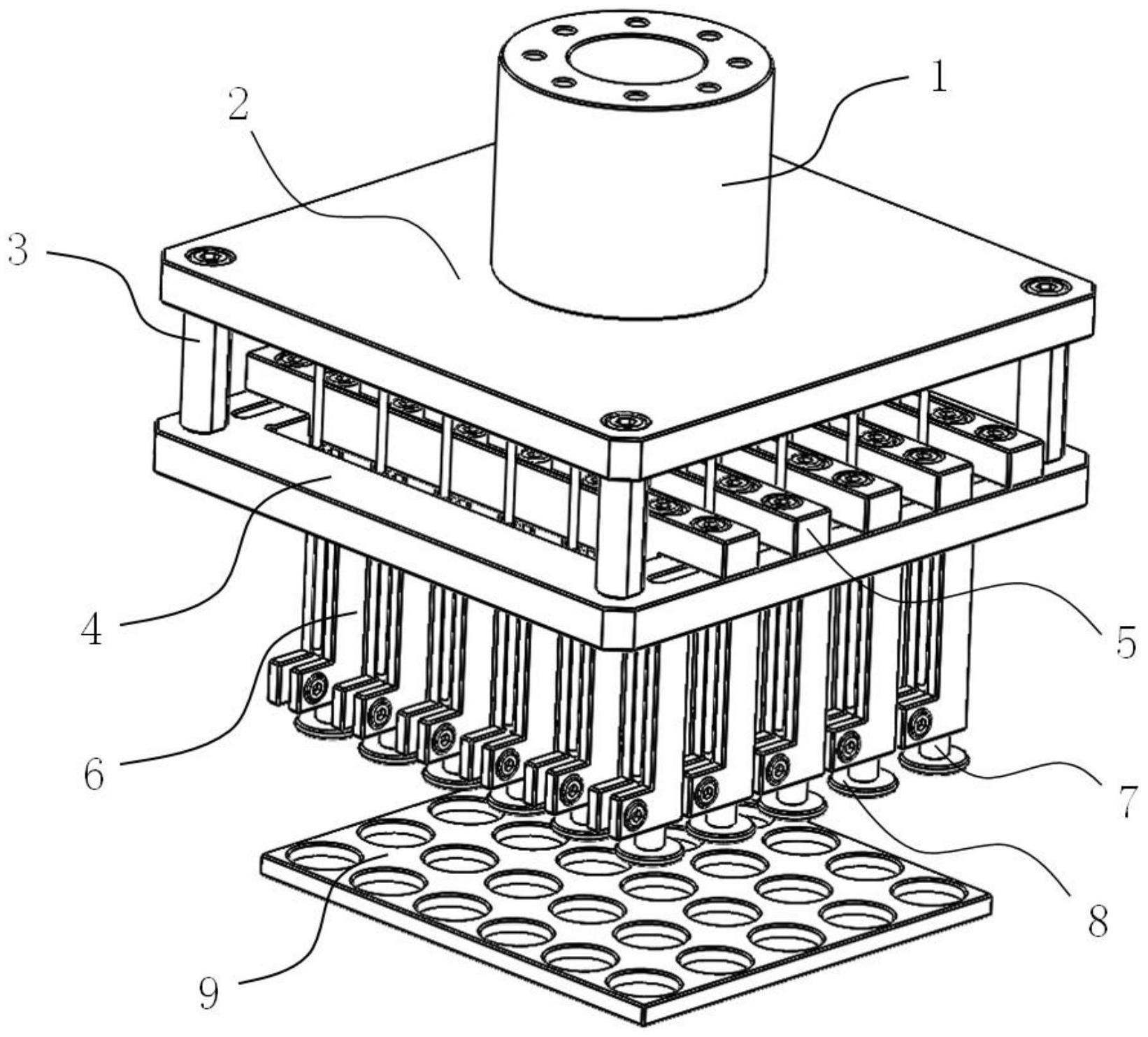
2、本实用新型的实施例通过以下技术方案实现:一种电磁式机械手,包括连接臂、第一连接板,连接于所述连接臂、支撑柱,连接于所述第一连接板、第二连接板,连接于所述支撑柱、安装条,连接于所述第二连接板;
3、所述安装条用于其连接件实现横向位移的调节,装夹条,连接于所述安装条,所述装夹条用于其连接件实现纵向位移调节,电磁铁,连接于所述装夹条。
4、根据一种优选实施方式,所述连接臂内部设置有通孔,所述通孔用于安装电磁铁的控制线,所述通孔周边开设有螺纹孔,所述螺纹孔连接于第一连接板。
5、根据一种优选实施方式,所述第一连接板内部设置有通孔,所述通孔与连接臂内部的通孔位置对应,所述通孔四周开设有台阶通孔,所述台阶通孔与连接臂开设的螺纹孔位置对应,所述台阶通孔外侧四周开设有反向的台阶通孔,所述反向台阶通孔连接于支撑柱。
6、根据一种优选实施方式,所述支撑柱圆周设置有两对称平面,所述支撑柱内部设置有螺纹孔,所述螺纹孔连接于第二连接板。
7、根据一种优选实施方式,所述第二连接板内部开设有安装槽,所述安装槽纵向对称位置开设有横向腰型台阶通槽,所述腰型台阶通槽连接于安装条。
8、根据一种优选实施方式,所述安装条两端开设有台阶通槽,所述台阶通槽之间开设有腰型台阶通槽,所述腰型台阶通槽连接于装夹条。
9、根据一种优选实施方式,所述装夹条设置有沉孔,所述沉孔一侧开设有通槽,所述通槽两侧一侧开设有台阶通孔,另一侧开设有螺纹通孔。
10、根据一种优选实施方式,所述装夹条设置有线槽,所述线槽用于安装电磁铁的控制导线。
11、根据一种优选实施方式,所述装夹条上沉孔设置有n个,其中n≥0。
12、根据一种优选实施方式,所述装夹条上线槽设置有m个,其中m≥1。
13、本实用新型实施例的技术方案至少具有如下优点和有益效果:本实用新型所提供的一种电磁式机械手,通过第二连接板对安装条进行横向调节和通过安装条对装夹条进行纵向调节,使得电磁铁可对不同位置的金属类零件进行抓取,且安装条和装夹条的数量可按需增、减,提高了机械手的灵活度及抓取的效率;只需要更换不同的装夹条及电磁铁即可实现不同重量、形状、尺寸的金属类零部件抓取,兼容性好;通断电控制方式即可实现金属类零件的取、放,控制方式简单可靠,设备总体占地面积小、重量轻。
技术特征:
1.一种电磁式机械手,其特征在于,包括连接臂(1)以及:第一连接板(2),连接于所述连接臂(1);支撑柱(3),连接于所述第一连接板(2);第二连接板(4),连接于所述支撑柱(3);安装条(5),连接于所述第二连接板(4),所述安装条(5)用于其连接件实现横向位移的调节;装夹条(6),连接于所述安装条(5),所述装夹条(6)用于其连接件实现纵向位移调节;电磁铁(7),连接于所述装夹条(6)。
2.如权利要求1所述的电磁式机械手,其特征在于,所述连接臂(1)内部设置有通孔,所述通孔用于安装电磁铁(7)的控制导线,所述通孔周边开设有螺纹孔,所述螺纹孔连接于第一连接板(2)。
3.如权利要求2所述的电磁式机械手,其特征在于,所述第一连接板(2)内部设置有通孔,所述通孔与连接臂(1)内部的通孔位置对应,所述通孔四周开设有台阶通孔,所述台阶通孔与连接臂(1)开设的螺纹孔位置对应,所述台阶通孔外侧四周开设有反向的台阶通孔,所述反向台阶通孔连接于支撑柱(3)。
4.如权利要求3所述的电磁式机械手,其特征在于,所述支撑柱(3)圆周设置有两对称平面,所述支撑柱(3)两端设置有螺纹孔,所述螺纹孔连接于第二连接板(4)和第一连接板(2)。
5.如权利要求4所述的电磁式机械手,其特征在于,所述第二连接板(4)内部开设有通槽,所述通槽纵向对称位置开设有横向腰型台阶通槽,所述腰型台阶通槽连接于安装条(5)。
6.如权利要求5所述的电磁式机械手,其特征在于,所述安装条(5)两端开设有台阶通孔,所述台阶通孔之间开设有腰型台阶通槽,所述腰型台阶通槽连接于装夹条(6)。
7.如权利要求6所述的电磁式机械手,其特征在于,所述装夹条(6)设置有沉孔,所述沉孔一侧开设有通槽,所述通槽两侧中一侧开设有台阶通孔,另一侧开设有螺纹通孔。
8.如权利要求6所述的电磁式机械手,其特征在于,所述装夹条(6)设置有线槽,所述线槽用于安装电磁铁(7)的控制导线。
9.如权利要求1所述的电磁式机械手,其特征在于,所述装夹条(6)上沉孔设置有n个,其中n≥0。
10.如权利要求1所述的电磁式机械手,其特征在于,所述装夹条(6)上线槽设置有m个,其中m≥1。
技术总结
本技术提供了一种电磁式机械手,包括连接臂、第一连接板、支撑柱、第二连接板、安装条、装夹条、电磁铁,第一连接板连接于连接臂下方,支撑柱连接于第一连接板和第二连接板之间,安装条设置在第二连接板的安装槽内,装夹条连接于安装条下方,电磁铁设置在装夹条上。本技术对金属类零件的夹取方便可靠,采用横向与纵向相结合的位移调节方式,能够满足各类尺寸、距离的金属类零件的夹取需求;只需要更换不同型号的电磁铁即可实现不同尺寸及不同重量的金属类零件的夹取,成本低,灵活性好,兼容性强。
技术研发人员:杨龙兵,敬玉兰,杨海龙,杨东升,吴双英
受保护的技术使用者:杨东升
技术研发日:20230426
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!