一种地轨机器人的制作方法
本技术涉及机器人,具体涉及一种地轨机器人。
背景技术:
1、工业自动化中,工业机器人逐渐被应用于生产的各个环节,替代人工作业,促进了自动化生产的进程,而机器人地轨作为机器人的一个行走辅助机构,也快速发展起来,在一些空间复杂、工件大的场合应用广泛,机器人地轨主要是带动工业机器人按指定路线进行移动,扩大机器人作业半径,扩展机器人使用范围功能,进一步提高机器人使用效率,降低机器人使用成本,实现全面自动化生产。
2、然而,地轨通常是敞口的,地轨内可能会落入一些杂物,在机器人沿着地轨移动经过时,杂物会使得机器人发生晃动,影响机器人的正常工作,甚至造成侧翻对机器人造成损伤。
3、因此,发明一种地轨机器人来解决上述问题很有必要。
技术实现思路
1、本实用新型的目的是提供一种地轨机器人,通过异物铲遇到滑轨内的杂物时可以将异物铲铲起,然后杂物被输送带输送至排物槽内排出,以解决上述技术中的不足之处。
2、为了实现上述目的,本实用新型提供如下技术方案:一种地轨机器人,包括两个滑轨和底板,两个所述滑轨的两侧均固定连接有若干l形固定座,且两个滑轨互相平行;
3、所述底板的底部固定连接有四个固定环,四个所述固定环分为两组,每组所述固定环的内部均转动连接有转轴,两个所述转轴的两端均固定连接有滚轮,且位于底板同一侧的两个滚轮为一组,每组所述滚轮分别在相对应的滑轨内滚动;
4、所述底板的顶部设置有用于驱动该机器人移动的驱动机构,所述底板的两侧均设置有用于铲除滑轨内杂物的清轨机构,所述底板的顶部固定连接有机器人本体,所述底板的内部开设有第一通过口,且第一通过口与其中一个转轴相对应。
5、作为本实用新型的优选方案,所述驱动机构包括机座,所述机座固定连接于底板的顶部,所述机座的内部固定连接有第一电机,所述第一电机的输出端固定连接有主动齿轮,其中一个所述转轴的外部固定连接有从动齿轮,且从动齿轮与第一通过口相对应,所述从动齿轮与主动齿轮的外部转动连接有链条,且链条穿过第一通过口。
6、作为本实用新型的优选方案,所述清轨机构包括滑动块,所述滑动块滑动连接于滑轨的内部,所述滑动块的两侧均固定连接有侧板,且其中一个侧板固定连接于底板的一侧,另一个所述侧板的内部开设有第二通过口,所述底板的顶部固定连接有第二电机,两个所述侧板之间转动连接有主动辊,且靠近底板的一端贯穿侧板固定连接于第二电机的输出端,所述滑动块的顶部开设有安置槽,所述安置槽的内部转动连接有从动辊,所述从动辊与主动辊的外部转动连接有输送带,所述滑动块远离底板的一端固定连接有异物铲,所述滑动块的另一端固定连接有排物槽,且排物槽贯穿第二通过口。
7、作为本实用新型的优选方案,所述滑动块为直角梯形,且直角边与滑轨的底部相贴合。
8、作为本实用新型的优选方案,两个所述侧板之间固定连接有挡板,且挡板与排物槽相贴合。
9、作为本实用新型的优选方案,四个所述滚轮的外部均固定套接有橡胶套,且橡胶套的外部设置有若干凸起。
10、在上述技术方案中,本实用新型提供的技术效果和优点:
11、1、通过第一电机带动主动齿轮开始转动,随后通过链条带动从动齿轮转动,然后通过转轴带动滚轮在滑轨内滚动,从而可以带动该机器人移动;
12、2、通过第二电机带动主动辊转动,然后通过输送带带动从动辊转动,通过设置的从动辊可以使得输送带运行的更加稳定,在该机器人移动的同时,底板通过固接的侧板推动滑动块在滑轨内滑动,在异物铲遇到滑轨内的杂物时可以将异物铲铲起,然后杂物被输送带输送至排物槽内排出,从而可以将滑轨内的杂物清理出来,进而使得该机器人在移动时更加稳定。
技术特征:
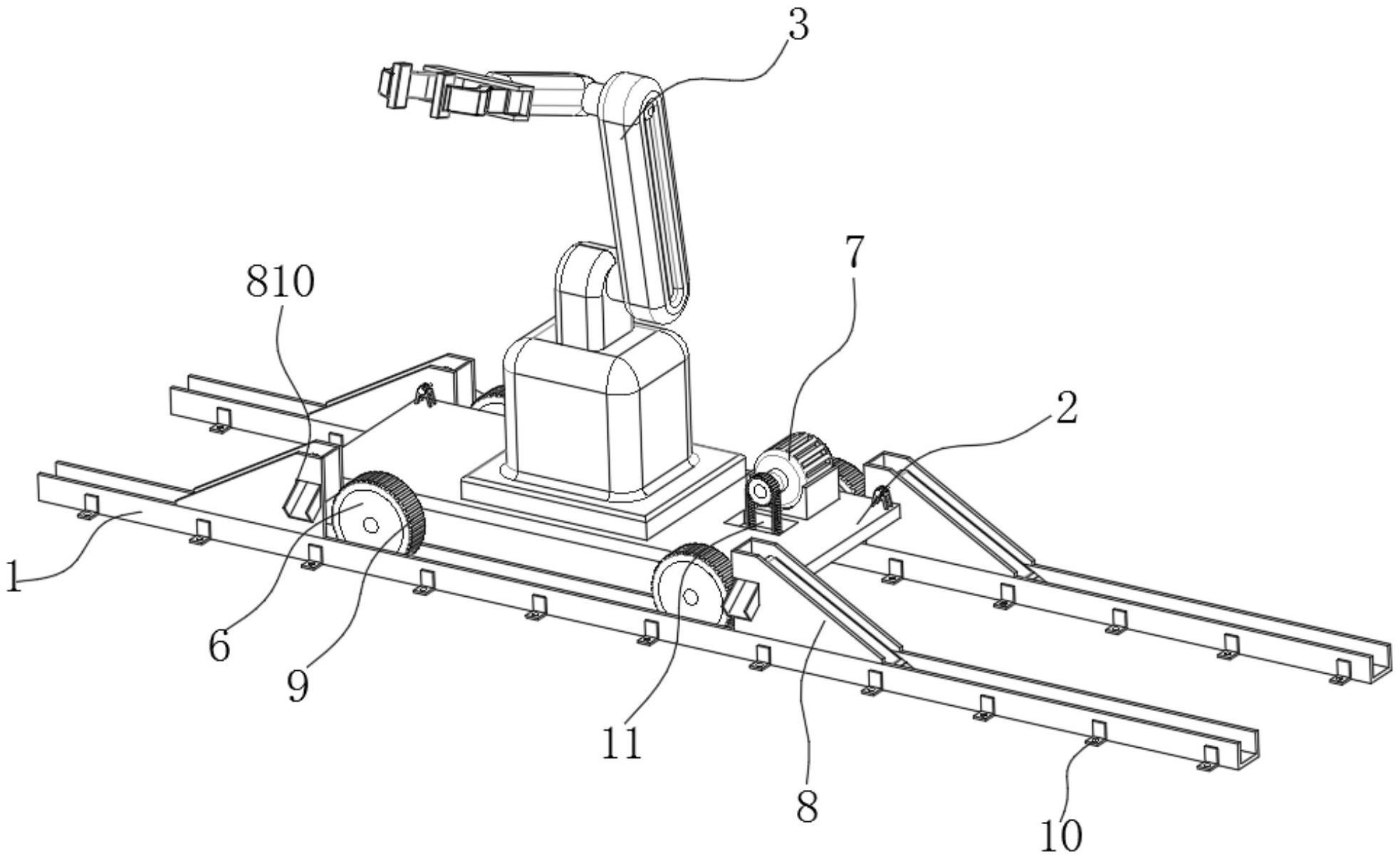
1.一种地轨机器人,包括两个滑轨(1)和底板(2),其特征在于:两个所述滑轨(1)的两侧均固定连接有若干l形固定座(10),且两个滑轨(1)互相平行;
2.根据权利要求1所述的一种地轨机器人,其特征在于:所述驱动机构(7)包括机座(701),所述机座(701)固定连接于底板(2)的顶部,所述机座(701)的内部固定连接有第一电机(702),所述第一电机(702)的输出端固定连接有主动齿轮(703),其中一个所述转轴(5)的外部固定连接有从动齿轮(704),且从动齿轮(704)与第一通过口(11)相对应,所述从动齿轮(704)与主动齿轮(703)的外部转动连接有链条(705),且链条(705)穿过第一通过口(11)。
3.根据权利要求1所述的一种地轨机器人,其特征在于:所述清轨机构(8)包括滑动块(801),所述滑动块(801)滑动连接于滑轨(1)的内部,所述滑动块(801)的两侧均固定连接有侧板(802),且其中一个侧板(802)固定连接于底板(2)的一侧,另一个所述侧板(802)的内部开设有第二通过口(810),所述底板(2)的顶部固定连接有第二电机(804),两个所述侧板(802)之间转动连接有主动辊(806),且靠近底板(2)的一端贯穿侧板(802)固定连接于第二电机(804)的输出端,所述滑动块(801)的顶部开设有安置槽(805),所述安置槽(805)的内部转动连接有从动辊(807),所述从动辊(807)与主动辊(806)的外部转动连接有输送带(811),所述滑动块(801)远离底板(2)的一端固定连接有异物铲(803),所述滑动块(801)的另一端固定连接有排物槽(808),且排物槽(808)贯穿第二通过口(810)。
4.根据权利要求3所述的一种地轨机器人,其特征在于:所述滑动块(801)为直角梯形,且直角边与滑轨(1)的底部相贴合。
5.根据权利要求3所述的一种地轨机器人,其特征在于:两个所述侧板(802)之间固定连接有挡板(809),且挡板(809)与排物槽(808)相贴合。
6.根据权利要求2所述的一种地轨机器人,其特征在于:四个所述滚轮(6)的外部均固定套接有橡胶套(9),且橡胶套(9)的外部设置有若干凸起。
技术总结
本技术公开了一种地轨机器人,包括两个滑轨和底板,两个所述滑轨两侧均固定连接有若干L形固定座;所述底板底部固定连接有四个固定环,四个所述固定环分为两组,每组所述固定环内部均转动连接有转轴,两个所述转轴的两端均固定连接有滚轮,且位于底板同一侧的两个滚轮为一组,每组所述滚轮分别在相对应的滑轨内滚动;所述底板顶部设置有用于驱动该机器人移动的驱动机构,所述底板两侧均设置有用于铲除滑轨内杂物的清轨机构,所述底板顶部固定连接有机器人本体,所述底板内部开设有第一通过口,且第一通过口与其中一个转轴相对应。本技术通过清轨机构可以将滑轨内的杂物清理出来,进而使得该机器人在移动时更加稳定。
技术研发人员:桂冬冬,周亚平
受保护的技术使用者:上海巨勋智能科技有限公司
技术研发日:20230427
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!