一种铁路巡检机器人
本技术涉及机器人,特别涉及一种铁路巡检机器人。
背景技术:
1、国家“十五”期间著重投入以“八纵八横”铁路主通道为重点的建设,形成畅通合理的铁路路网,并不断更新路线规划。截至2022年底,全国铁路营业里程达到14.63万公里,全国火车站已有3868个火车站点,其中高铁站点数量为1418个。政府正大力推进高速铁路网建设。随着中国经济的发展和人民生活水平的提高,越来越多的人开始使用铁路作为出行方式,这也将进一步推动火车站和高铁站的建设和扩张。
2、人们在乘坐火车或高铁时,难免会发生小物件意外掉入列车与站台间隙造成列车运行受阻和乘客损失两大问题。智能拾取技术在国内虽在物流、工业等领域的应用有所突破,但至今并没有专门针对掉落在火车与站台缝隙里的物品进行拾取装置设计。市场上虽然已有部分巡检机器人或拾物机器人,但是它们的拾取范围、拾取效率以及安全性等方面都还有很大的提升空间,所以在铁路上仍采用传统人工拾取方式。随着人工智能、机器视觉、机器学习等技术的不断发展和应用,智能巡检拾物机器人的功能和性能也将不断提升,因此需要一种高精度的智能化铁路巡检拾物机器人设计。
技术实现思路
1、本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种铁路巡检机器人,能够增大拾取范围、提高拾取效率以及稳定性和安全性。
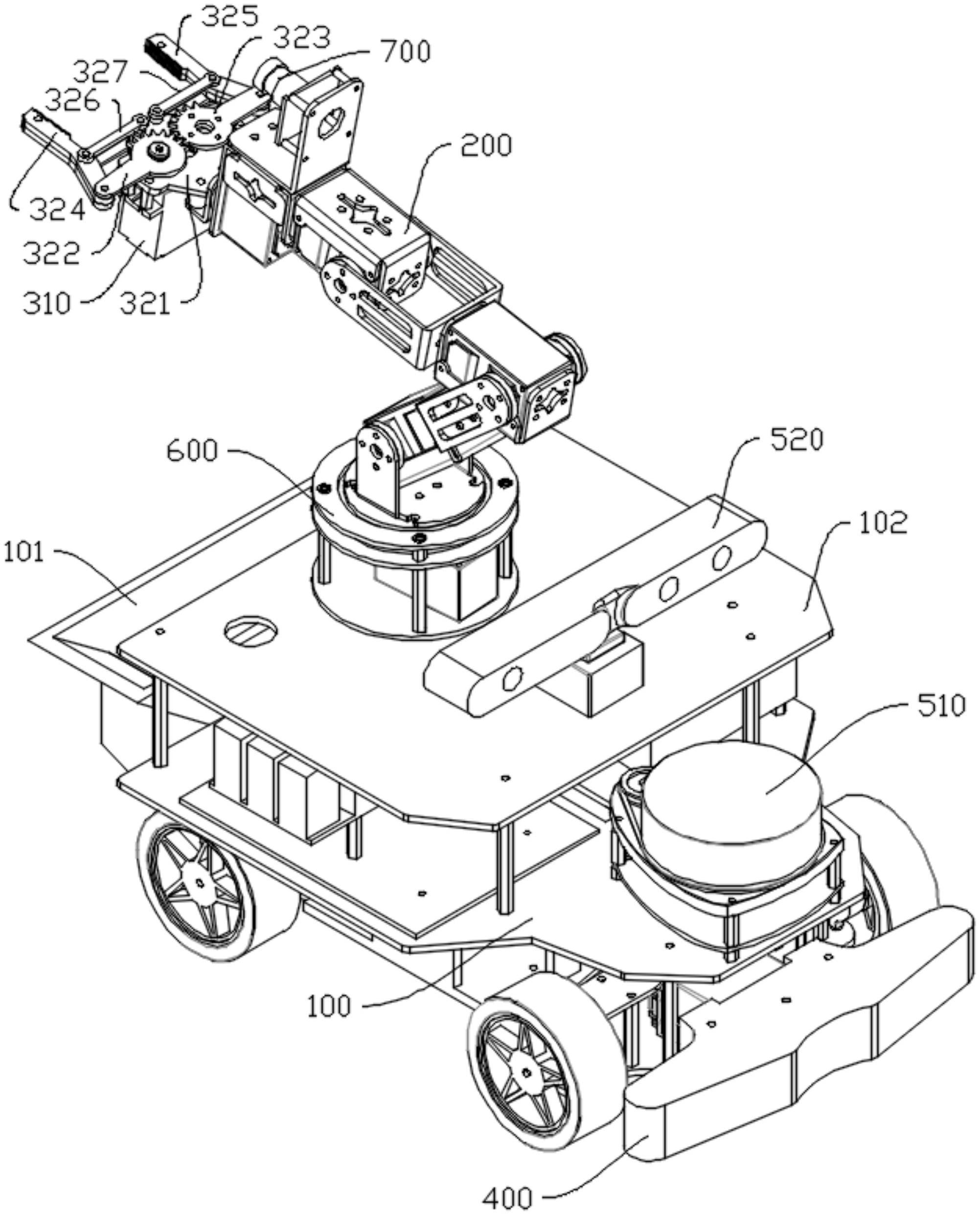
2、根据本实用新型实施例的铁路巡检机器人,包括:
3、前轮转向底盘,其上设有储物斗,所述前轮转向底盘采用前轮转向;
4、拾取装置,包括机械臂和夹取结构,所述机械臂设于所述前轮转向底盘顶部靠近所述储物斗的一侧,所述机械臂的一端与所述前轮转向底盘顶部转动连接,另一端与所述夹取结构转动连接;
5、防撞机构,设于所述前轮转向底盘侧部;
6、传感装置,包括激光雷达和第一摄像头,所述激光雷达和所述第一摄像头皆设于所述前轮转向底盘上且靠近所述前轮转向底盘的前侧设置;
7、控制装置,设于所述前轮转向底盘上,用于接收由所述传感装置采集的环境数据、控制所述前轮转向底盘行驶、以及控制所述拾取装置拾取目标对象后放置在所述储物斗内。
8、根据本实用新型实施例的铁路巡检机器人,至少具有如下有益效果:
9、通过传感装置可以采集环境数据进行地图构建,基于构建的地图控制前轮转向底盘行驶至目标地点并在行驶过程中进行避障,再控制机械臂和夹取结构对目标地点的目标对象进行拾取后放置在储物斗内,可以清楚大范围的环境情况,从而可以增大拾取范围;有效进行避障,则可以提高拾取效率。储物斗可以保证一次拾取多个物品,无需多次来回拾取,提高了拾取效率。采用前轮转向可以使得前轮转向底盘趋于不足转向,可以提高行驶稳定性和安全性,避免后轮转向可能会出现过度转向从而导致故障损坏的情况。前轮转向底盘侧部的防撞机构可以在铁路巡检机器人与障碍物发生碰撞时起到缓冲保护的作用,提高铁路巡检机器人的行驶安全性。本实用新型实施例的铁路巡检机器人,能够增大拾取范围、提高拾取效率以及稳定性和安全性。
10、根据本实用新型的一些实施例,所述防撞机构采用高密度海绵。
11、根据本实用新型的一些实施例,所述防撞机构设于所述前轮转向底盘前侧。
12、根据本实用新型的一些实施例,所述夹取结构包括:
13、握钳机构,与所述机械臂的所述另一端连接,所述握钳机构具有转动部、传动部和夹持部,所述转动部用于转动后带动所述传动部转动,以通过所述传动部带动所述夹持部张开或闭合;
14、夹取舵机,用于驱动所述转动部转动。
15、根据本实用新型的一些实施例,所述握钳机构包括:
16、固定底片,其上开设有转轴孔,所述转轴孔用于设置所述夹取舵机的转动轴;
17、第一传动件,其一端套设于所述转动轴上,且所述第一传动件边缘具有第一锯齿部;
18、第二传动件,与所述固定底片可转动连接,且所述第二传动件边缘具有与所述第一锯齿部齿合的第二锯齿部;
19、第一夹持件,其一端与所述第一传动件远离所述第一锯齿部的一端转动连接;
20、第二夹持件,其一端与所述第二传动件远离所述第一锯齿部的一端转动连接;
21、第三传动件,其一端与所述固定底片可转动连接,另一端可转动连接于所述第一夹持件的两端之间;
22、第四传动件,其一端与所述固定底片可转动连接,另一端可转动连接于所述第二夹持件的两端之间。
23、根据本实用新型的一些实施例,所述第一夹持件靠近所述第二夹持件的内侧设有第一波浪纹,所述第二夹持件靠近所述第一夹持件的内侧设有第二波浪纹。
24、根据本实用新型的一些实施例,所述控制装置包括:
25、地图构建控制模块,用于接收由所述传感装置采集的环境数据并进行地图构建;
26、行驶控制模块,与所述地图构建控制模块电性连接,用于根据地图控制所述前轮转向底盘行驶;
27、夹取控制模块,与所述地图构建控制模块和所述行驶控制模块电性连接,用于控制所述拾取装置拾取目标对象后放置在所述储物斗内。
28、根据本实用新型的一些实施例,所述机械臂采用六自由度机械臂。
29、根据本实用新型的一些实施例,所述机械臂的所述一端与所述前轮转向底盘顶部之间还设有旋转云台,所述旋转云台用于控制所述机械臂的旋转角度。
30、根据本实用新型的一些实施例,所述机械臂上靠近所述夹取结构的一端还设有第二摄像头。
31、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种铁路巡检机器人,其特征在于,包括:
2.根据权利要求1所述的铁路巡检机器人,其特征在于,所述防撞机构(400)采用高密度海绵。
3.根据权利要求1或2所述的铁路巡检机器人,其特征在于,所述防撞机构(400)设于所述前轮转向底盘(100)前侧。
4.根据权利要求1所述的铁路巡检机器人,其特征在于,所述夹取结构包括:
5.根据权利要求4所述的铁路巡检机器人,其特征在于,所述握钳机构包括:
6.根据权利要求5所述的铁路巡检机器人,其特征在于,所述第一夹持件(324)靠近所述第二夹持件(325)的内侧设有第一波浪纹,所述第二夹持件(325)靠近所述第一夹持件(324)的内侧设有第二波浪纹。
7.根据权利要求1所述的铁路巡检机器人,其特征在于,所述控制装置包括:
8.根据权利要求1所述的铁路巡检机器人,其特征在于,所述机械臂(200)采用六自由度机械臂。
9.根据权利要求1或8所述的铁路巡检机器人,其特征在于,所述机械臂(200)的所述一端与所述前轮转向底盘(100)顶部之间还设有旋转云台(600),所述旋转云台(600)用于控制所述机械臂(200)的旋转角度。
10.根据权利要求1或8所述的铁路巡检机器人,其特征在于,所述机械臂(200)上靠近所述夹取结构的一端还设有第二摄像头(700)。
技术总结
本技术公开了一种铁路巡检机器人,涉及机器人技术领域,包括:前轮转向底盘,其设有储物斗,前轮转向底盘采用前轮转向;拾取装置,包括机械臂和夹取结构,机械臂设于前轮转向底盘顶部靠近储物斗的一侧,机械臂的一端与前轮转向底盘顶部转动连接,另一端与夹取结构转动连接;防撞机构,设于前轮转向底盘侧部;传感装置,包括激光雷达和第一摄像头,激光雷达和第一摄像头皆设于前轮转向底盘上且靠近前轮转向底盘的前侧设置;控制装置,用于接收由传感装置采集的环境数据、控制前轮转向底盘行驶、以及控制拾取装置拾取目标对象后放置在储物斗内。本技术实施例的铁路巡检机器人,能够增大拾取范围、提高拾取效率以及稳定性和安全性。
技术研发人员:梁钰欣,朱伟枝,黎志勇,张金纳,梁海泓,欧恒君,陈玉浩
受保护的技术使用者:广东理工学院
技术研发日:20230427
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!