夹头机构、机械臂以及机器人的制作方法
本技术涉及机器人,尤其涉及一种夹头机构、机械臂以及机器人。
背景技术:
1、机器人上会安装夹头机构,通过夹头机构来夹持物件并通过机器人上的臂机构实现物件的位置改变。其中,cn111331067a公开了一种基于齿轮齿条传动的定心夹爪,该定心夹爪包括气缸2、纵向齿条4、齿轮5、横向齿条7、导杆8、夹持块9和v型定位块10,气缸2驱动纵向齿条4向上或者向下运动,带动齿轮5转动,齿轮5带动横向齿条7横向移动,进而实现夹持块9作出夹紧或者松开的动作。该装置通过气缸2来实现纵向齿条4的移动,气缸的活动精度相对较低,而且气缸需要伸缩活动,控制也相对不便。
技术实现思路
1、鉴于此,有必要提供一种夹头机构、机械臂以及机器人,可以提高夹头机构的活动精度并且提升操控性。
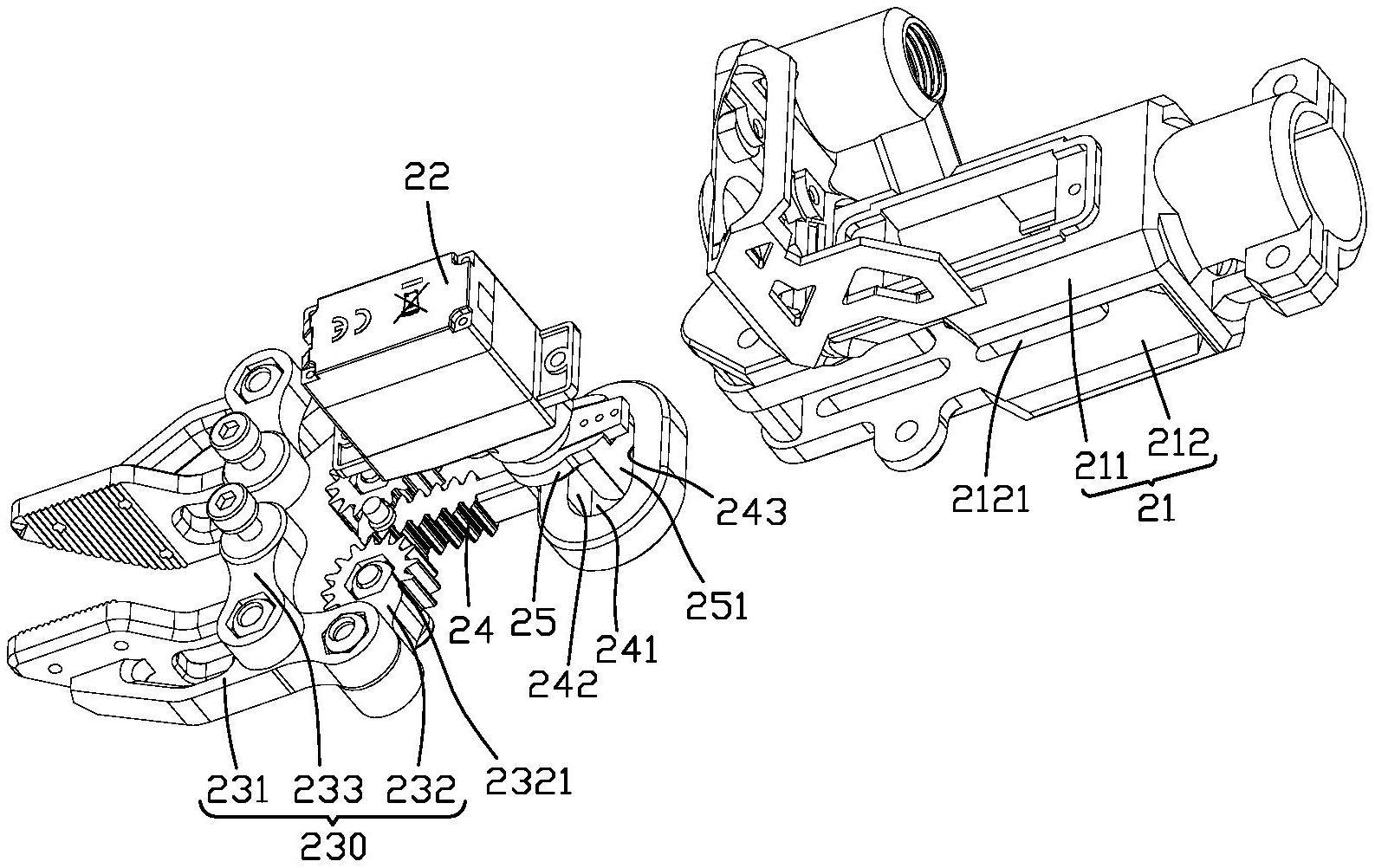
2、本实用新型第一方面提供一种夹头机构,包括:
3、安装座;
4、电机;
5、夹头组件,所述夹头组件与所述安装座连接,所述夹头组件包括与所述安装座铰接的齿轮;
6、齿条,所述齿条与所述齿轮啮合,所述齿条可往前或往后移动,所述齿条包括靠前的第一壁面和与所述第一壁面间隔并靠后的第二壁面;以及
7、曲柄构件,所述曲柄构件与所述电机连接,所述曲柄构件的偏心端置于所述第一壁面和所述第二壁面之间。
8、相较于现有技术,本实用新型有益效果包括:本实用新型可以通过电机控制曲柄构件向一方向转动,在转动的过程中,曲柄构件会作用齿条的第一壁面,从而带动齿条向前运动,继续向该方向转动,曲柄构件会作用齿条的第二壁面,从而带动齿条向后运动,齿条的前后移动实现夹头组件的夹紧或者松开,从而提高了夹头机构的活动精度并且提升操控性。
9、进一步的,所述夹头组件包括:
10、夹头;
11、第一连杆,所述齿轮位于所述第一连杆的一端,所述第一连杆的另一端与所述夹头铰接;以及
12、第二连杆,所述第二连杆的一端与所述安装座铰接,所述第二连杆的另一端与所述夹头铰接,所述第二连杆和所述第一连杆位于所述夹头的同侧。
13、进一步的,还包括:
14、摄像头,安装于所述安装座上;和/或
15、照明灯,安装于所述安装座上。
16、本实用新型第二方面提供一种机械臂,包括:
17、所述的夹头机构;以及
18、臂机构,所述夹头机构安装于所述臂机构上。
19、进一步的,所述臂机构包括:
20、臂组件;以及
21、第一舵机,所述第一舵机与所述臂组件之间通过平面推力轴承连接,所述第一舵机用于使所述臂组件转动。
22、进一步的,所述臂机构包括:
23、第一臂;
24、第一连接件,所述第一连接件与所述第一臂连接,所述第一连接件包括两个第一连接板;以及
25、两个第二舵机,一所述第二舵机连接一所述第一连接板,两个所述第二舵机用于共同带动所述第一连接件向一方向转动。
26、进一步的,所述臂机构包括:
27、第一臂;
28、第二连接件,所述第二连接件与所述第一臂连接,所述第二连接件包括第二连接板,所述第二连接板延伸方向与所述第一臂具有一预定夹角;
29、第二臂;
30、第三舵机,所述第三舵机与所述第二臂连接,所述第三舵机与所述第二连接板活动连接。
31、进一步的,所述臂机构包括臂,所述臂为空心管,线缆布置于所述空心管中。
32、进一步的,所述臂机构还包括管夹,所述管夹以可拆卸的方式夹设在所述臂的端部,所述管夹连接所述安装座或者连接所述臂机构的舵机或者连接所述臂机构的与舵机活动连接的连接件。
33、本实用新型第三方面提供一种机器人,所述机器人包括所述的机械臂。
技术特征:
1.一种夹头机构,其特征在于,包括:
2.根据权利要求1所述夹头机构,其特征在于,所述夹头组件包括:
3.根据权利要求1所述的夹头机构,其特征在于,还包括:
4.一种机械臂,其特征在于,包括:
5.根据权利要求4所述的机械臂,其特征在于,所述臂机构包括:
6.根据权利要求4所述的机械臂,其特征在于,所述臂机构包括:
7.根据权利要求4所述的机械臂,其特征在于,所述臂机构包括:
8.根据权利要求4所述的机械臂,其特征在于,所述臂机构包括臂,所述臂为空心管,线缆布置于所述空心管中。
9.根据权利要求8所述的机械臂,其特征在于,所述臂机构还包括管夹,所述管夹以可拆卸的方式夹设在所述臂的端部,所述管夹连接所述安装座或者连接所述臂机构的舵机或者连接所述臂机构的与舵机活动连接的连接件。
10.一种机器人,其特征在于,所述机器人包括如权利要求4-9任一项所述的机械臂。
技术总结
本技术提供一种夹头机构,包括:安装座、电机、夹头组件和曲柄构件。其中,所述夹头组件与所述安装座连接,所述夹头组件包括与所述安装座铰接的齿轮。所述齿条与所述齿轮啮合,所述齿条可往前或往后移动,所述齿条包括靠前的第一壁面和与所述第一壁面间隔并靠后的第二壁面。所述曲柄构件与所述电机连接,所述曲柄构件的偏心端置于所述第一壁面和所述第二壁面之间。本技术可以提高夹头机构的活动精度并且提升操控性。
技术研发人员:张维良,邝奕文,余笃凯
受保护的技术使用者:深圳幸狐科技有限公司
技术研发日:20230428
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!